
FIBRO 桁架机械手碰撞监控解析
2019-10-25 06:46贾广鹏
设备管理与维修 2019年11期
陈 萌,贾广鹏,刘 乐
(中国重汽集团济南动力部,山东济南 250220)
1 机床简介
德国FIBRO GSA 公司的桁架机械手(图1)采用SINUMERIK 840D 系统,垂直轴采用SITEMA 安全锁紧机构,X/Z 轴2 个直线轴采用西门子直线电机驱动,A/C 轴是旋转轴,可以实现纵向和横向的机床上料。机械手最大的特点是可以根据机床的请求信号实现自动上料,无需手动操作,大大提高了生产线的自动化程度并降低了手动操作的不可靠性。
2 碰撞监控
2.1 实时监控
机械手到指定工位上料或下料时,如果工件位置不准确或工装定位不准等都会使机械手的上料或者下料动作无法完成,严重的还可能发生机械手与工件碰撞,造成很大的损失。因此加工过程中,机械手除了对工件的位置有开关和机床的通讯信号外,还通过加工程序对上料或下料过程进行碰撞监控,及时感知上下料时的异常情况,避免发生大的碰撞。加工程序在不同过程中,通过读取系统参数$AA_LOAD[Z]读取Z 轴的负载,通过对Z 轴的负载进行实时监控以避免对机床造成更大的破坏。

图1 桁架机械手
2.2 宏定义和几个工件程序


图2 组态的是碰撞监控的轴、宏指令和R 参数的对应关系。
如表1 所示,测量值一般应加上10%后存储在R 参数中,但累加值一般不应低于3。在全局用户数据中可以查看(图3)。

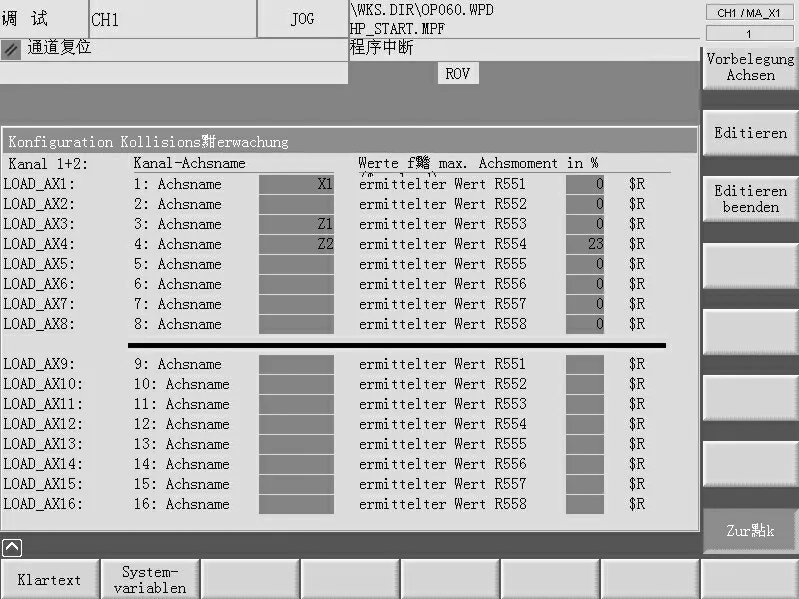
图2 碰撞监控的轴、宏指令和R 参数的对应关系

表1 测量值与应用值
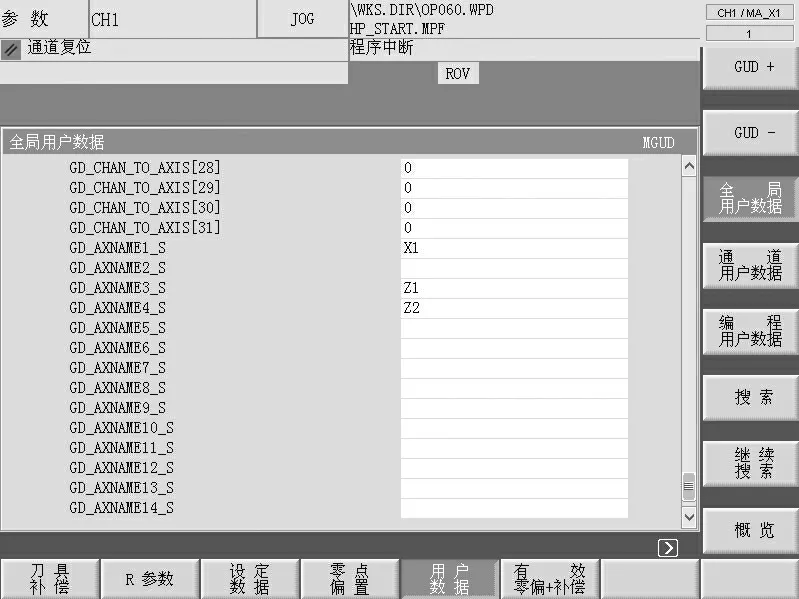
图3 全局用户数据

3 结束语
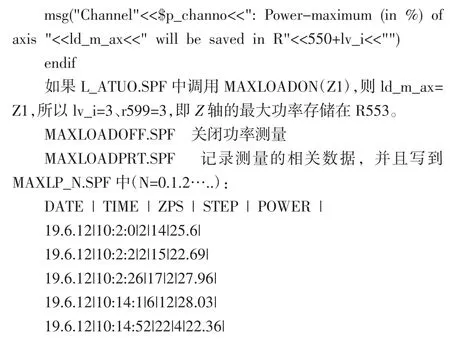
通过分析可以看到,机械手在上料下料过程中Z 轴的负载只要超出标准值,系统就会立刻删除余程,并发出报警,有效地避免了碰撞给机械手带来重大的损失,并且该次监控的时间、日期、零点偏置、加工标志和功率都被记载到MAXLP_N.SPF 中,通过查看记录可以对一段时间的加工过程有一个详细的了解,查看机械手的负载是否稳定,如果波动频繁可以从传动结构或机床的定位不准确等项找出问题并改善。
猜你喜欢
装备制造技术(2020年4期)2020-12-25
建筑与装饰(2020年20期)2020-08-20
河北省科学院学报(2020年4期)2020-03-19
制造技术与机床(2018年11期)2018-11-23
中国新技术新产品(2017年22期)2017-10-30
制造技术与机床(2017年4期)2017-06-22
科技视界(2016年27期)2017-03-14
科学与财富(2016年32期)2017-03-04
广西教育·C版(2016年10期)2016-12-07
通信电源技术(2016年1期)2016-04-16
