
智能化车用预警式安全带系统PI 控制研究
2019-10-23 07:09:38尤毅曹丽娜赵宇
汽车实用技术 2019年19期
尤毅,曹丽娜,赵宇
(1.山东交通技师学院,山东 临沂 276000;2.北京理工大学,北京 100081)
前言
目前,现有的安全带的设计属于被动安全技术范畴[1][2],不存在提前保护功能,仅在危险发生后对人员进行采取保护。当前,主动安全技术已经在车辆上应用广泛,针对被动安全带存在的弱点,并在被动安全带基础上,设计出一套智能化预警式安全带装置,能够根据不同状态实现预紧,是实现主动保护和驾乘安全舒适较实用的方法。在采集车辆各种预警传感器、安全带预紧力等信号基础上,控制系统以安全带系统卷收器驱动电机的回转方向及角度作为输出参数。最终结合台架试验及仿真数据,合理确定控制规则,并由此确定出不同状态的多个预警级别。
1 安全带系统控制编程环境的搭建
设计中,综合考虑成本、可靠性等因素,使用Freescale微控器MC9S12DP256 单片机作为智能化预警式安全带系统主控芯片[3]。 这款控制器的编译环境为CodeWarrior5.1,如图1 所示。
图1 CodeWarrior 软件环境
2 安全带系统整体控制设计
通过采集到的预警传感器的相关数值,安全带主动预警控制系统能够以此判断相应的安全级别,在危险发生前提醒驾乘人员,并控制安全带卷收系统驱动电机及时动作,实现卷收工作,拉紧安全带,实现主动安全。设计中使用手动、串口和自动三种触发模式。在控制算法使用上可采用PI 控制法、比功率法、速度预测算法、加减速度峰值法等;结合实际应用时车辆各方面的限制,综合几种控制算法的特点,并考虑到对安全带织带张力的恒拉力控制,预警控制系统选择PI 控制算法[4][5]。
3 智能化安全带系统控制策略研究
设计的预警安全带系统上电后,系统在检查各个模块均正常工作后,则默认进入自动触发模式。系统控制器根据超声波测距、制动踏板力两种传感器信号的不同,依次组合确定三个安全级别的阈值。根据每种组合判断当前车辆所处的安全等级,控制器发出相应的控制信号控制驱动电机,提前预警,电机以不同模式转动完成卷收系统不同的预紧动作。
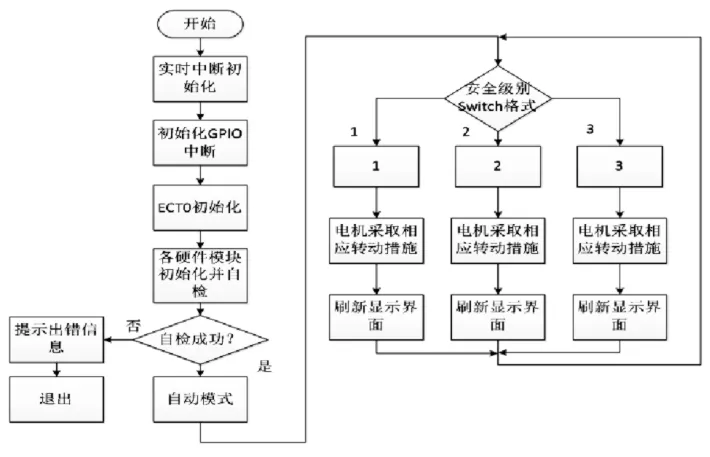
图2 系统控制整体流程图
为了在电机转动的过程中不会因为安全带张力过大使驾驶员感到不适或者受到伤害,程序中使用了PI 算法,对电流传感器的电流值进行实时反馈,并通过对电机控制PWM 波占空比的调节使安全带张力始终保持在出厂的安全带张力初始值左右,从而使安全带的张力不会在大范围内变化,更好的起到保护驾乘人员的作用,设计的整体控制流程图如图2所示。
根据上述两种传感器信号不同,组合设计了三种不同的安全级别:安全级别1、2、3,按对应数字排序分别对应不同的行车危险程度,安全级别3 最为危险。安全级别1 为危险程度弱,驱动电机小扭矩正转两次,进而通过卷收器机构拉紧安全带织带两次,对驾乘人员提醒;安全级别2 为危险程度中等,驱动电机小扭矩正转,然后迅速反转,动作时间较短,收紧安全带织带,并将织带锁止;安全级别3,电机大扭矩迅速正转,然后迅速反转,在危险发生前一瞬间迅速消除安全带间隙。
动作过程中,控制器通过调节脉冲波的占空比(PWM控制)进行控制[6],实现控制驱动电机电枢的电流大小,最终实现控制电机扭矩大小。在调节PI 参数时,根据瞬态控制法来确定:如果被控系统为开环系统且其阶跃响应如图3 所示[7],在图中可以得到曲线的最大斜率R,同时得到达到R时所用时间L,最终根据斜率与时间确定出P、PI 最优控制参数。[8]
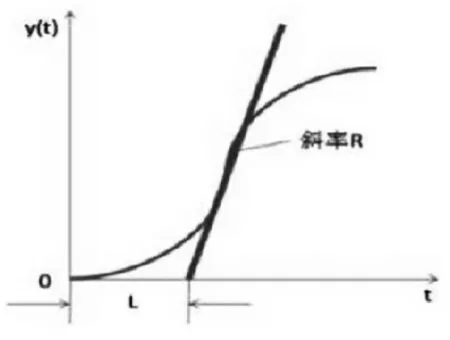
图3 开环系统阶跃响应图
根据以上控制理论方法,通过实验法最终确定参数,如图4 所示利用示波器记录了电流传感器采集到的电流值的瞬态响应图。

图4 示波器记录实际瞬态响应曲线
通过示波器波形得出参数:

编写程序软件采用C 语言,定义了Kp为整形参数,取Kp=2V。

所有使用的控制参数确定后,编写控制器C 语言程序。
4 手动模式与自动模式选择
系统自动模式为默认工作模式,上电正常工作即可进入。系统在自动模式工作中,根据上述两种传感器信号结合的阈值来判断安全等级。液晶屏系统板如图5 所示,其中三个SAFE 对应三种安全等级,START 和STOP 为手动模式与自动模式切换控制按键,按下START_CSB 按钮启动自动模式,按下STOP_CSB 按钮将启动手动模式,在液晶触摸屏上即可实现手、自动切换。

图5 触摸屏控制界面
手动模式工作中,可由控制板按键设置安全等级。按下控制器PCB 板上的相应按键时,触发中断,改变安全等级变量,主函数判断当前的安全等级并发出相应控制指令,从而控制驱动电机执行动作。
自动模式工作中,能够实现主动消除安全带织带和驾驶人员间的空隙余量。采用PI 控制算法控制驱动电机电流,不断调节脉冲波占空比,使电流保持在一定值,从而使驱动电机的发出的转矩保持恒定,最终能够保证安全带张力在初始预紧力上下一定微小范围内浮动,防止由于织带的张力过大造成驾驶员受伤。张力控制算法逻辑如图6 所示。

图6 PI 控制流程图
5 系统安全等级阈值参数确定
根据GB7258-2004_机动车运行安全技术条件规定,使用液压制动系统的车辆,满载和空载对制动踏板力最大值都有限制,分别为不得大于500N 和 400N。根据实际经验数据,考虑到车辆常规运行状态,取制动踏板力的最大值为370N。 在编写程序时,测距传感器信号等比例放大50 倍,模拟最大安全距离50 米。由此确定三个安全级别,如表1:
阈值预先编写在控制器中,也可以根据实际需要使用液晶触摸屏进行设置或修改,当触摸不同的方框时会弹出数字输入动态字符标控件,参数输入完毕后,立即发送参数到控制器中,并生效,方便后期调试和实际验证。
6 结论
本文主要描述了软件控制方案。控制方案分为手动控制与自动控制,在控制中,使用PI 算法控制电流反馈信号和电机旋转,保证安全带张力大小保持一定值,保护驾驶人员的行车安全。确定了行车不同状态下的三个安全等级和每个等级下的距离、制动踏板力的初步阈值,和触摸液晶屏结合,通过其自带功能实现了阈值在液晶屏上的手动更改、自动存储的功能,方便了后期实验进一步标定相关阈值的工作。在不同安全等级下,实现安全带系统多级预警的功能。同时,为系统后期的编程确定了大的方向和功能要求。
猜你喜欢
机电工程技术(2023年1期)2023-02-24 05:21:20
机电工程技术(2022年10期)2022-11-27 10:36:58
纺织科学与工程学报(2022年4期)2022-11-22 07:03:10
软件(2021年2期)2021-08-19 20:55:32
中学生数理化·八年级物理人教版(2019年3期)2019-04-25 06:20:58
疯狂英语·新读写(2017年1期)2017-04-06 03:52:31
纺织科学与工程学报(2017年1期)2017-02-25 07:06:57
小学生作文(低年级适用)(2017年12期)2017-02-06 01:24:09
汽车文摘(2015年11期)2015-12-02 03:02:52
电脑迷(2015年7期)2015-05-30 04:50:35
