变电站智能巡检机器人视觉导航系统设计
2019-10-21 09:16沈治国
科技风 2019年20期
关键词:变电站
摘 要:在电网领域中变电站属于重要的枢纽,定期对其进行巡视处理,有助于确保变电站相关电气设备的合理运行与正常使用,近几年,我国在电力技术发展的过程中,变电站巡检技术已经从传统的人工巡检转变成为机器人的巡检形式,在此过程中,应根据机器人巡检工作特点、需求等合理进行视觉导航系统的设计,通过正确的方式方法提升变电站的巡检工作效果,满足当前的时代发展需求,为后续工作的正确落实提供帮助。
关键词:变电站;智能巡检机器人;视觉导航系统设计
在变电站智能巡检机器人视觉导航系统实际设计的过程中,应遵循与时俱进的发展原则,利用合理的方式针对变电站进行合理的巡检处理,针对视觉导航系统进行合理的设计与改革,以此维护变电站各方面工作的合理落实,达到预期的工作目的。
1 视觉导航整体结构
1.1 功能要求
在科学技术快速发展的过程中,变电站的电力体制在逐渐改革,电力系统已经开始向着自动化的方向发展,在变电站部分的工作中,相关机械设备的电气信号,可以利用监控、数据采集等相关系统、绝缘监测方式等获取,实现了相关设备的远程监控目的,在一定程度上可以降低相关变电站的维护工作数量,并延长巡视与检修工作周期。在变电站智能巡检机器人相关视觉导航系统实际设计的工作中,应树立正确观念意识,遵循科学化、合理化的工作原则,采用正确方式方法提升整体设计工作效果,充分发挥出相关视觉导航系统的设计作用,使得系统的运行功能符合要求。当前在变电站的智能巡检工作中,已经提出了相对应的工作建议与要求,在设计视觉导航系统的过程中,应遵循科学化的工作原则,通过合理的方式提升设计工作效果。保证其有着信息实时化搜集处理功能、数据处理功能、运动响应功能与其他功能,满足当前的时代发展需求,全面增强各方面工作效果,为后续工作的良好发展夯实基础。
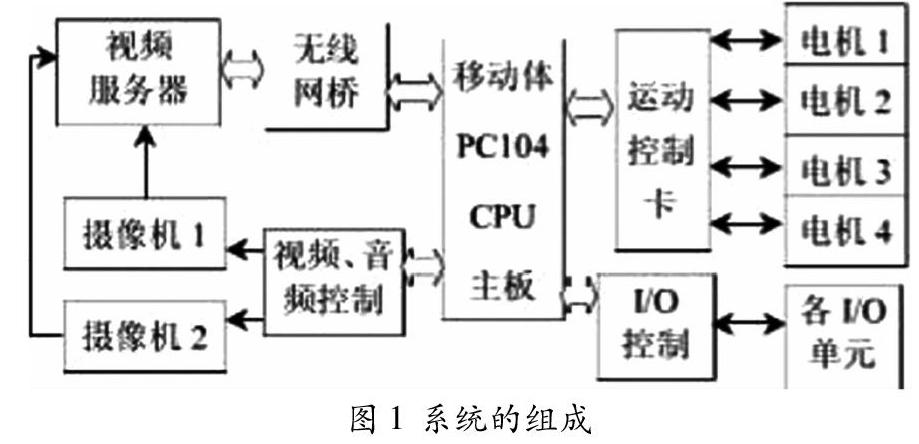
1.2 总体结构
对于相关机器人而言,在实际设计的工作中,为了更好的创建视觉导航系统,应遵循科学化的工作原则,全面提升整体设计工作效果。在实际设计工作中,应合理创建移动提运动控制子系统,将PC104主板结构以及PMAC2A-104运动控制卡以及相关电机设备的驱动器设备等合理融入其中,以便于在机器人实际巡检期间,针对运动以及行为进行严格的控制。在机器人实际应用的过程中,可以全面的搜集各种数据信息,合理使用超声技术方式、激光雷达技术方式、GPS技术方式等,以便于合理的开展路径规划工作、巡检相关工作等等。在此工程中,系统可以实时化的将局部数据、规划数据等搜集在一起,结合车体情况开展动力学建模活动,在接收相关速度指令数据之后,可以将其分解到相关的电机中,通过解算的方式,了解电机承受速度特点,以便于合理的进行电机管理控制,利用正确的方法全面提升整体设计工作效果以及质量,在一定程度上能够增强各方面工作效果与水平。
2 变电站智能巡检机器人视觉导航系统设计
2.1 路径导航设计
当前在视觉导航设计的过程中,可以将其划分成轨线类型、路边线类型与路面分割类型的视觉引导形式,应遵循与时俱进的工作原则,提升各方面工作质量。
①对于轨线引导而言,主要是预先针对机器人需要行走的路线进行设计,保证设备可以按照线路进行运动。使用此类方式在一定程度上可以营造较为良好的路面环境,无需参照其他的内容与标准。[1]
②在对路边线进行提取的过程中,应将道路两侧的边缘线提取出来,之后应当将边缘线的交点计算而来。在此过程中,还需按照相关机器人的实际行走路线,合理的设计两侧边缘角平分线。在利用此类方式的过程中,无需进行标记处理,有助于提升工作质量,但是,很容易出现边缘缺乏明显性的问题,也会导致导航效果受到一定影响。[2]
③通常状况之下,路面亮度很高,采集图像的中间下部分属于道路部分,所以,应合理使用路面分割方式,通过链码跟踪方式进行处理,使得图像可以划分成为路面与非路面两种,之后使得机器人设备可以在道路中间运行。在采用这种方式的过程中,应保证道路部分与非道路部分之间的亮度差符合要求,如果两个部分的亮度差较低,将会使得分割效果受到影响,也不能确保导航参数设计的真实性与准确性,稳定性也会面临一些瓶颈问题。[3]
2.2 视觉处理设计
在视觉处理设计的过程中,应合理使用视频采集系统与技术,结合当地的实际状况与视觉导航系统的设计特点、要求等,正确的选择摄像头设备,将其设置在车体的前部位置。通常情况下,在机器人视觉导航系统设计工作中,应遵循科学化的原则,结合工作特点、需求等,合理的进行相互协调与管控,及时发现其中存在的问题,创建出科学化的工作模式与管理体系。在设计视觉处理系统的过程中,应使用各种模块对其进行组建处理,每个模块都应结合视觉导航系统的设计功能要求、目标要求等进行协调控制,通过正确的设计,全面提升整体设计工作效果与水平,将各方面设计优势充分发挥出来。[4]
2.3 图像处理处理设计
在图像处理设计的过程中,应总结丰富的设计经验,遵循科学化的设计原则,结合各方面工作特点、需求等,合理的完成相关设计任务。一方面,应重视彩色分割系统的设计,根据规律特点、导航系统设计需求等,将彩色分割设计方式合理应用其中,创建出科学化的工作模式,以此提升设计工作的质量水平。在此过程中,还需按照彩色分割设计内容与要求,正确的进行相互协调控制。如果在彩色图像处理的过程中,还使用传统的灰度图像处理方式,将会导致工作效果降低,所以,可以使用像素公式针对各种原始凸显进行灰度化处理,在对比各种结果的情况下,合理的设计。[5]
3 现场调试及测试
在该系统设计完成之后,在晴天环境、阴天环境、早晨环境与无法预知参考轨线的坐标位置上开展试验活动,机器人在运动过程中,最高速度是0.7米每秒,平均速度是0.5米每秒,与到航线之间的偏离误差最高为4厘米。在系统运行期间,所获得的图像像素为60帧每秒的二十四位彩位图,在导航参数获取到其他处理流程中,所消耗的时间为1秒钟,在一定程度上可以满足实时化的处理要求。在机器人实际运行期间,可以更好的拍摄出有代表优势的图像内容,结合各种图像的特点、规律等,正确的进行处理,有助于提升整体图像处理工作效果,将导航系统的设计优势、作用等全部发挥出来,以此提升各方面工作的可靠性与有效性,增强整体工作的力度。[6]
4 总结
在变电站智能巡检机器人视觉导航系统实际设计的过程中,应总结丰富的经验,遵循科学化与合理化的工作原则,统一标准全面提升整体智能变电站巡检工作效果与水平,将先进工作方式与设计方法的优势发挥出来,增强各方面系统的设计力度与工作水平,优化工作机制,提升机器人的视觉导航系统设计效果,满足当前的工作要求。
参考文献:
[1]陈园园,王涛,周虎成.智能变电站巡检服务机器人[J].周口师范学院学报,2018,35(5):45-49.
[2]李元吉.變电站智能巡检机器人视觉导航方法研究[J].数字化用户,2017,23(43):40-55.
[3]宋爱国,许春山,徐宝国,等.复杂环境下远程巡检机器人关键技术及应用[Z].东南大学,亿嘉和科技股份有限公司,扬州大学,南京天创电子技术有限公司,2018,12(33)144-199.
[4]姜道伟.变电站智能巡检机器人的定位和导航[D].新疆:新疆大学,2016,22(34)66-99.
[5]赵凯雅.用于移动机器人设备的视觉导航系统和方法:中国,CN201811027541.8[P].2018-12-04.
[6]东北大学.基于视觉示教的移动机器人定位与导航系统:中国,CN201810832511.8[P].2018-11-30.
作者简介:沈治国(1977-),男,湖南长沙人,软件工程硕士,副教授,主要研究方向:电子信息、嵌入式技术。
猜你喜欢
科技研究·理论版(2021年17期)2021-12-07
科学与生活(2021年20期)2021-11-18
科学与财富(2021年33期)2021-05-10
科学家(2021年24期)2021-04-25
中国电气工程学报(2019年9期)2019-09-10
中国新技术新产品(2018年16期)2018-10-31
中国新技术新产品(2017年24期)2017-11-30
中国房地产业·上旬(2017年2期)2017-10-21
科技创新导报(2017年14期)2017-08-24
消费导刊(2014年12期)2015-02-13