一种基于缺齿结构的齿轮型巨磁阻编码器的研制
2019-10-21 06:14窦珂姜浩董昊
中国电气工程学报 2019年22期
窦珂 姜浩 董昊
摘 要:文中研制了一种基于缺齿结构的齿轮型巨磁阻编码器。所研制的齿轮型编码器由独立的磁感应读头和齿轮两部分组成,其中齿轮上设计有一个半缺齿结构。磁感应读头采用巨磁阻传感器作为敏感元件,在永磁体提供的偏置磁场下,能够采集随轴转动的齿轮对周围磁场产生的扰动信号,后经信号处理可输出包含齿轮的转动位置、速度和零位信息的弦波信号。所研制的齿轮型巨磁阻编码器不仅具有精度高,可靠性好等优点,还解决了光电编码器码盘易碎、精度要求高,易受油污、粉尘影响等问题,以及克服了传统的一体式磁性编码器磁环加工工艺复杂的缺点。
关键词:巨磁阻;齿轮型;缺齿
0 引 言
编码器是一种用于检测机械运动的速度、位置、角度、距离或计数的传感器,随着工业自动化行业的快速发展,数控和伺服系统等工控设备的大量应用,以及机械设备数控精度要求的不断提高,编码器产品的种类不断增加,应用比例也得到大幅度的提升,整个市场规模在迅速扩大[1-2]。目前常用的编码器主要有光电编码器和磁性编码器两种。
光电编码器是由光电接收元件和玻璃码盘组成的。光电编码器工作时是通过把发光元件发出的光经过码盘上均匀的切割线后,被光电接收元件感应,而产生相应的电信号,该信号再经后续电路处理,可输出有效信号。但光电编码器的玻璃码盘易碎,在抗振动方面具有先天性的不足;而且光线易受粉尘、油污等影响,不能适应于恶劣环境,防护等级低;同时由于其精度与码盘刻线有关,想要提高精度就必须增加码盘刻线,要求的加工精度就越高,难度也就越高[3-4]。
磁性编码器是由磁感应读头和磁环组成的,工作时将磁环与被测转轴相连,当被测转轴做圆周转动时,磁环上的磁极对由远而近地靠近磁感应读头时,会使其周围的磁场环境发生发化。磁感应读头去感应磁场的变化,将磁感应强度的方向和大小的变化转化为电阻或者电压的变化,然后通过后续的信号处理电路输出角度值。磁性编码器受外界污染影响小,与光电编码器相比具有独特的优势。然而,磁环是由铁磁性粉末和作为粘结剂用的塑性物质通过注塑、压铸或铸造等工艺加工成型的柱形环状结构,工艺上很难控制材料的均匀性,磁化位置也较难精准控制,使得磁环的磁矩大小和强弱、以及均匀性较难进一步得到提高[5-7]。
文中提出了一种新型磁编码器,该编码器不含玻璃码盘或磁环,是由巨磁阻磁感应读头和一个独立的齿轮组成,解决了编码器的光码盘和磁环加工精度和加工难度的问题。该编码器的齿轮上设计有一个缺齿,磁感应读头是采用巨磁阻芯片作为敏感元件,它可以灵敏地感应该齿轮在转动过程中对周围磁场的影响,从而获得当前转轴的转速和圈数等信息。文中详细介绍了该编码器的结构组成,工作原理,以及实现方式,并通过实验的方法验证了该编码器的工作性能。
1齿轮型磁性编码器整体结构
文中设计的基于巨磁阻的齿轮型磁性编码器主要是由巨磁阻磁感应读头和齿轮两部分组成,如图1所示,1为磁感应读头,2为齿轮。其中,磁感应读头采用巨磁阻芯片作为敏感元件,巨磁阻(Giant Magneto
-Resistance,简称GMR)效应是1988年在Fe/Cr多层膜中发现的各向异性效应,相对于传统的磁电阻效应(约1-3%)大一个数量级以上。基于巨磁阻效应制成的巨磁阻芯片具有灵敏度高,相同条件下输出信号大,响应频率高、体积小等优点。GMR传感芯片是由四个GMR电阻以惠斯通电桥的形式连接起来构成的,这种桥式结构可以提供较好的温度补偿,温度漂移较小。
齿轮上特别设计了一个半缺齿结构,用于记录齿轮的旋转圈数。
2齿轮型磁性编码器具体设计
2.1工作原理
如圖2所示,分离式齿轮型磁性编码器的磁感应读头是由双路集成GMR梯度传感器芯片1、单路GMR梯度传感器芯片2、信号处理电路板3和永磁体4等部分组成,齿轮5是由导磁材料(钢铁材料)做成的,易被永磁体4磁化。
(1)齿轮的模数为m,齿数为Z,齿间距λ为mπ,齿厚为b。齿轮上有一个齿设计成半缺齿结构(图2中红色箭头处),即该齿的厚度是b/2,用于记录齿轮的旋转圈数。
(2)永磁体采用铁氧体材料,固定在信号处理电路板后面的相应位置,为双路GMR传感器和单路GMR传感器提供偏置磁场。
(3)双路集成GMR梯度传感器芯片采用裸芯绑定技术焊接在信号处理电路板上,并且在正对齿轮齿的位置,用于采集齿轮的转速。该芯片里面包含A、B两路GMR全桥,间距为(1/4+N)λ,其中每个全桥的桥臂间距为(1/2+N)λ(其中,N=0,1,2…)。它们分别用于采集随轴转动的齿轮对周围磁场引起的磁场变化量,即齿轮每转过一个齿,都会输出一个相应的弦波信号,两路输出信号呈90°相位差。
(4)单路GMR梯度传感器也是采用裸芯绑定技术焊接在信号处理电路板上,并且在正对齿轮缺齿的位置。该芯片用于记录齿轮旋转的位置和圈数,GMR全桥的桥臂间距为Nλ(其中,N=0,1,2…),在缺齿部位输出正弦信号,其他部位没有信号输出。
双路集成GMR梯度传感器芯片和单路GMR梯度传感器芯片的磁敏感轴方向都是沿齿轮运动方向。被磁化的齿轮在转动过程中会使分布在GMR梯度传感器芯片周围的磁场信号发生变化:当齿轮的凸齿正对着GMR梯度传感器芯片时,分布在GMR梯度传感器芯片上的磁场方向垂直于磁敏感轴;随着齿轮的转动,凸齿逐渐远离敏感芯片时,分布在GMR梯度传感器芯片上的磁场会沿着磁敏感轴向上形成一个分量;当凹齿正对着GMR梯度传感器芯片时,分布在GMR梯度传感器芯片上的磁场方向又逐渐恢复垂直于磁敏感轴;当下一个凸齿逐渐接近GMR梯度传感器芯片时,使得分布在GMR梯度传感器芯片上的磁场沿着磁敏感轴向下形成一个分量。两路GMR梯度传感器芯片可以分别灵敏地感应该微弱磁场信号的变化,并把它转换输出相应的电压信号,再把该信号经过放大、调零电路处理之后可以得到一个包含齿轮转速、方向、位置和圈数的弦波信号。
如果磁感应读头输出的表示齿轮转速和圈数的弦波信号频率分别用f1、f2表示,齿轮的转速用n(r/min)表示,齿轮的齿数用Z表示,则有:
2.2电路设计
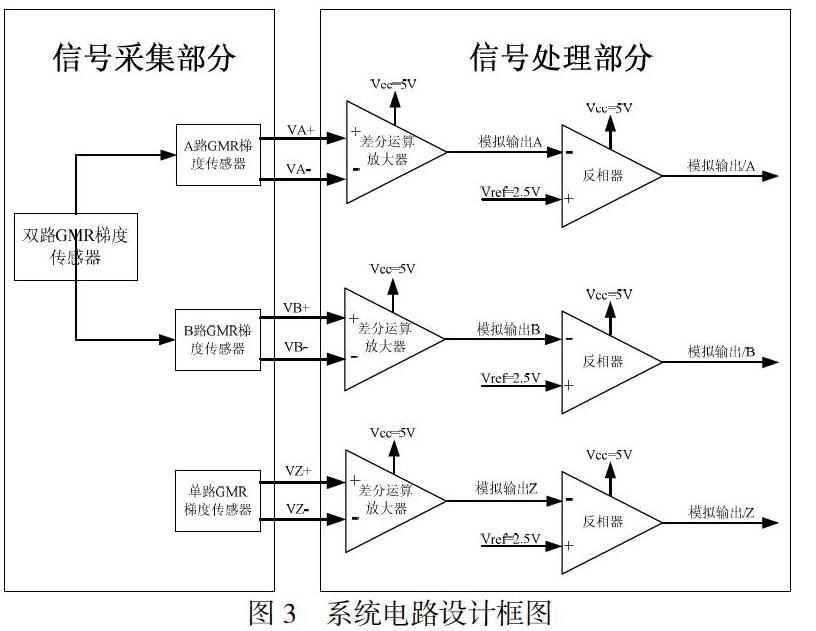
该分离式齿轮型磁性编码器的电路部分根据功能不同分为信号采集部分和信号处理两大部分,如图3所示。
双路集成GMR梯度传感器和单路GMR梯度传感器,其内部都是电阻桥式结构组成的,能够灵敏地检测随轴转动的齿轮对周围引起的磁场梯度变化量,但由于各桥路电阻的微小差异,电阻桥的输出信号并不是完全平衡的,有一定的偏置信号存在。因此,信号采集模块中,在每一路GMR传感器的信号输出端都设计有特殊处理电路,以调节因桥电阻不平衡引起的偏置电压,使其为零。
(2)信号处理
信号处理部分的功能则是通过对上述GMR梯度传感器采集到的信号进行相应放大、反相处理后,可以输出包含齿轮转动速度、方向、位置和圈数等信息的3路互补弦波模拟信号,分别是A、/A,B、/B,Z和/Z。通过A或/A或B或/B信号的频率计算可知当前齿轮的转速;通过A与B相位的前后,可判定齿轮的转动方向;通过Z或/Z的波形可知当前齿轮的位置,根据其频率可知当前齿轮每分钟转过的圈数。
3 实验与分析
文中设计的分离式齿轮型磁性编码器,其双路GMR梯度传感器间距为0.5mm,单路GMR梯度传感器间距为1mm,齿轮的模数为0.35,齒数为64。在实验室的转速测试平台上对文中设计的分离式齿轮型磁性编码器进行测速实验,设定齿轮转速为60 r/min,根据公式(1)和(2)计算可知,f1和f2分别为64Hz和1Hz。
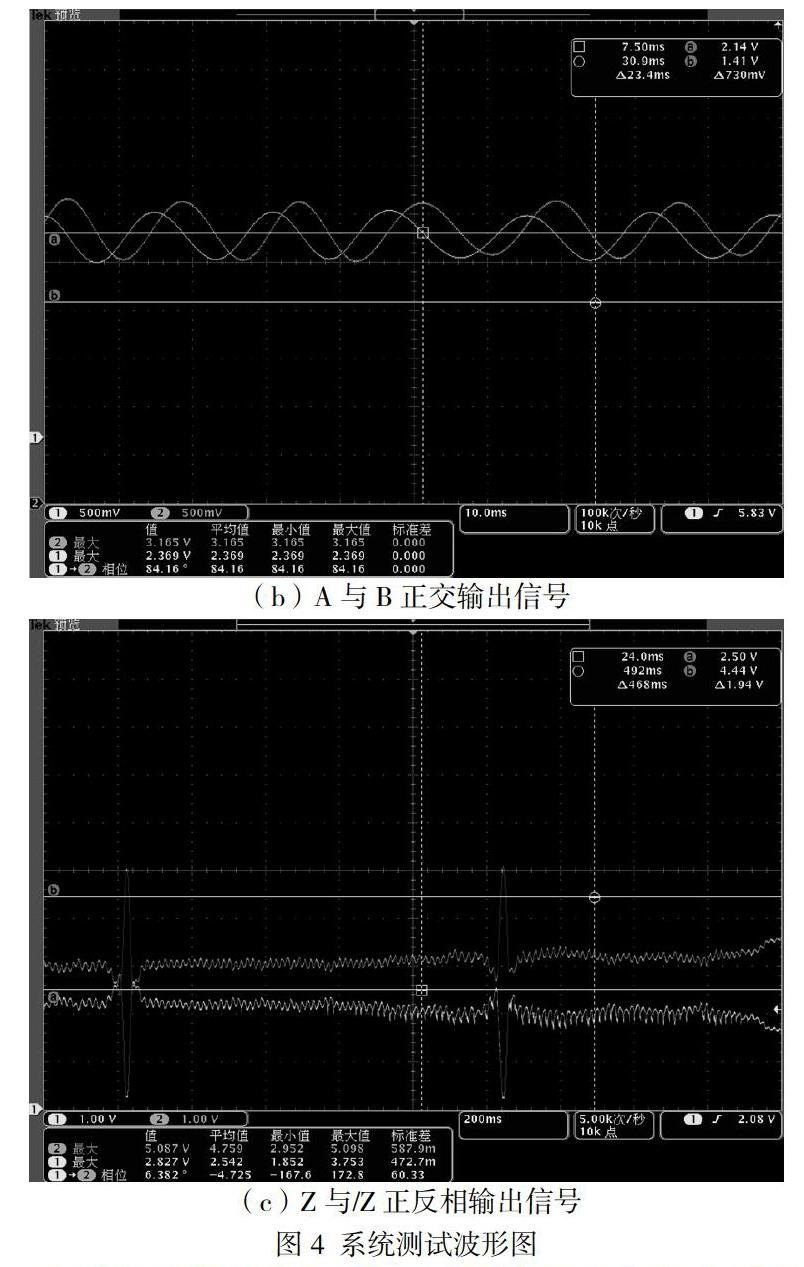
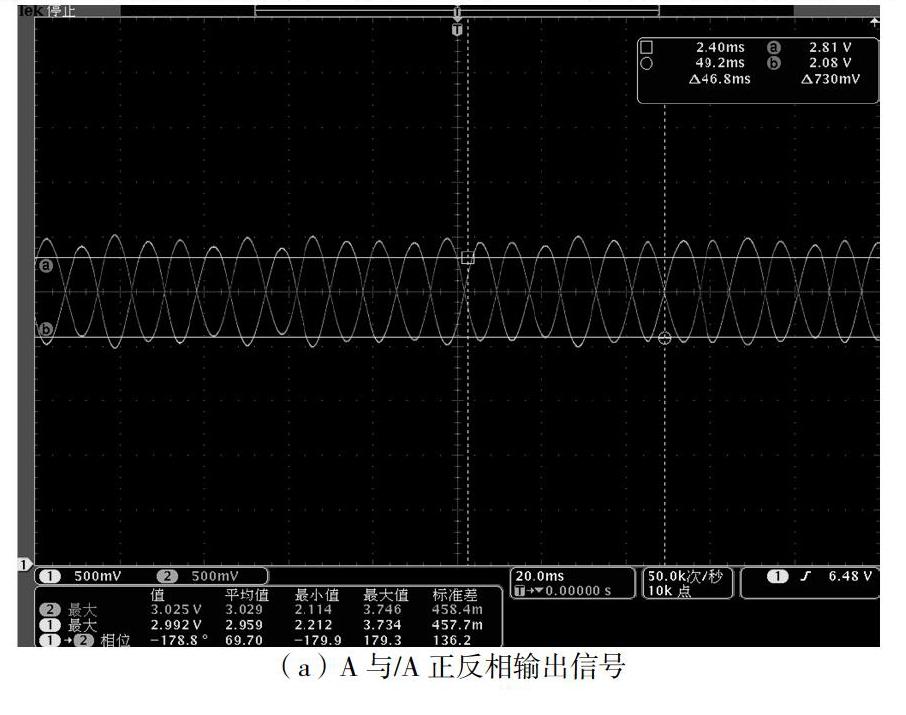
测量结果如图4所示,图4(a)是磁感应读头输出的A路正反向弦波信号A和/A, 二者的相位差近似等于180°;与设定指标一致,频率为64.1 Hz,与设定齿轮转速基本吻合。图4(b)是磁感应读头输出的A路和B路弦波信号A和B,二者近似呈90°相位差,与设定指标一致。图4(c)是磁感应读头输出的Z路正反向弦波信号Z和/Z,二者相位差近似为180°,满足设定指标;Z信号频率为1Hz,与设定齿轮旋转圈数一致。
通过对以上实验结果分析可知,该编码器的性能满足要求,能够实现对齿轮转速、方向、位置和圈数等的高精度测量。
4 结语
经过实验验证,文中设计的基于缺齿结构的齿轮型巨磁阻编码器灵敏度高,精度高,可靠性好,并且无码盘、磁环等部件,直接采用独立的带缺齿的硅钢齿轮,防护等级高,抗振动冲击能力强。解决了光电编码器码盘易碎、精度要求高,易受油污、粉尘影响等问题;以及克服了传统一体式磁性编码器磁环加工工艺复杂的缺点。产品的性能和生产效率都得到了很大的提高,可广泛应用于在位置检测、速度位置反馈控制,输送设备位置反馈控制,电梯位置反馈控制和其他特殊设备应用或较恶劣环境中。
参考文献
[1] 吴忠,吕绪明.基于磁编码器的伺服电机速度及位置观测器设计[J].中国电机工程学报,2011,31(9):82-87.
[2] 张涛,杨振强,王晓旭.应用eQEP及编码器测量电机位置与速度的方法[J].电气传动,2011,41(4):48-51.
[3] 王力,杜坤梅,胡博,等.基于磁编码器永磁同步电动机转速及位置的检测[J].哈尔滨理工大学学报,2007,12(6):80-83.
[4] 倪国东.齿轮旋转编码器:中华人民共和国,CN204301754U[P].2015-04-29.
[5] 陆丕清.一种用于磁感应齿轮编码器的磁场结构:中华人民共和国,CN104374412A[P]. 2015-02-25.
[6] 郑鑫.磁编码器的智能化设计[D].广州:华南师范大学,2004:1-57.
[7] 张立华,吴红星,郑继贵,等.基于工业机器人用位置伺服磁编码器的设计[J].微电机,2013,46(10):56-60.
[8] FREITAS P P,SILVA F B,MELO L V ,etal.Giant Magneto-resistive sensors for rotational speed control and current monitoring applications[J]. Electronics, Circuits and Systems, 1998,3:267-269.
[9] 赖武彦.自旋极化的电流——2007年度诺贝尔物理学奖评述.物理,2007(12):897-903.
[10] 张海波.一种分离式齿轮型磁性编码器设计[J].电子世界,2018,8
作者简介:窦珂,(1987-),女,硕士,工程师,主要从事磁传感器及磁补偿技术的研究工作。