基于双目立体视觉测量系统的无人机稳定性评测
2019-10-21 09:41:16
福建质量管理 2019年19期
(广东工业大学土木与交通工程学院 广东 广州 510006)
一、基本原理
双目立体视觉测量的基本原理就是使用两个摄像机成一定角度对被测物进行三维测量[2],两个有一定角度的相机拍摄到被测物体不同方向在不同摄像机中的图像,这两张图像经过图像处理,由于从不同角度拍摄,所以这两张图像会有视差,然后在结合标定出来的摄像机参数就可以得到被测物体的空间三维坐标[3]。
如图1所示,空间点的P(xw,yw,zw),在两台图像平面上的成像点。

图1 双目立体视觉测量系统原理图
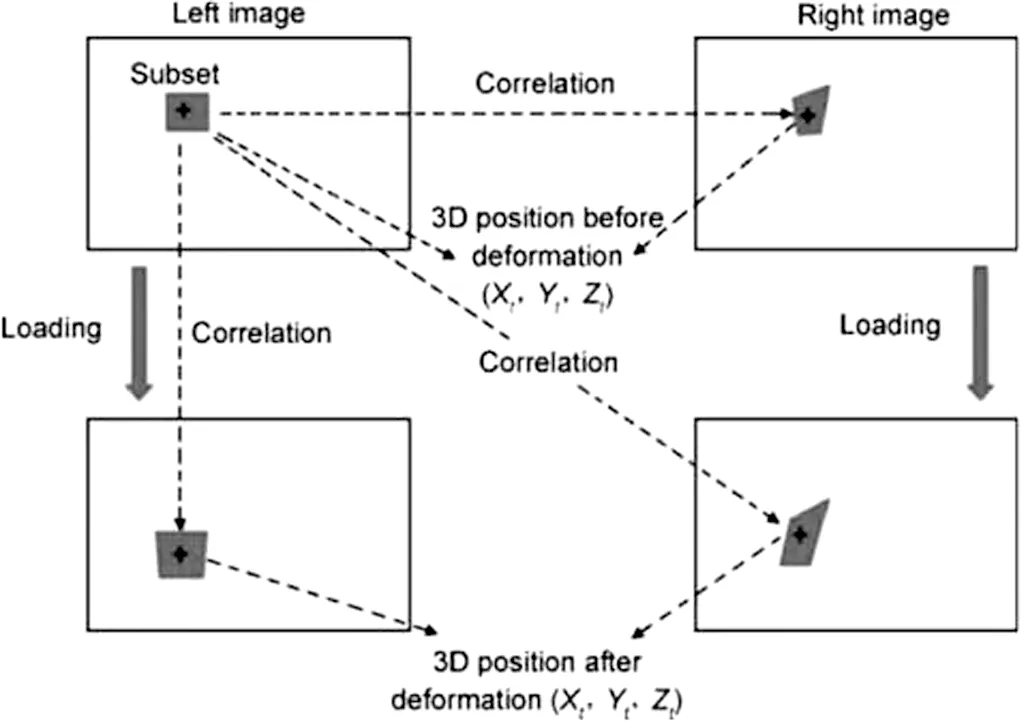
图2 测量系统原理图
二、实验器材
(1)本次实验采用的实验器材是DJI-Spark无人机,这款无人机体积小,操控容易,避障功能强大并且结合了机器视觉和采用UltraSmooth机械云台可以尽可能地减轻无人机悬停时的振动,而且拍摄的图像采用1/2.3英寸CMOS镜头,有效像素可达到1200万,满足实验要求。
(2)双目立体视觉测量系统的相机采用两台FASTCAM SA3摄像机。

图3 无人机照片
三、实验布置和测量
本次实验采用双目立体视觉测量系统对正在进行结构振动测量的DJI-Spark无人机进行空间运动轨迹采集。
(1)首先进行试验前准备工作,把高速摄像机的位置按照结构最优参数设计摆放,摄像机之间的距离、测量系统离无人机之间的距离还有摄像机之间的夹角都要调整好,若是实验环境光线不充足,将补光灯放在合适的位置。
(2)在无人机的后面粘贴人工自制的散斑图,以便双目立体视觉测量系统能够更加精确地检测到无人机在悬停时的运动轨迹。
(3)通过摄像机测量系统可得到在无人机进行结构测量时的空间三维坐标。
四、结论
本文通过架设两台高速摄像机搭建的双目立体视觉测量系统对DJI-Spark无人机进行稳定性分析,得到无人机在进行结构振动测量悬停时的无人机机身受各种因素的影响导致的运动轨迹本文使用双目立体视觉测量系统能够得到空间点的三维坐标,通过双目立体视觉测量系统对无人机进行图像采集和分析,得到无人机在进行测量时的空中运动轨迹,为无人机进行结构振动测量提供精度分析的依据。
猜你喜欢
小哥白尼(趣味科学)(2020年3期)2020-07-27 01:44:42
电子制作(2019年20期)2019-12-04 03:51:38
军营文化天地(2018年2期)2018-04-20 07:08:03
中国公共安全(2017年8期)2017-10-13 08:12:17
中国公共安全(2017年11期)2017-02-06 05:27:47
办公自动化(2016年18期)2016-12-17 19:32:18
创新作文(小学版)(2016年10期)2016-11-11 05:45:17
现代计算机(2016年11期)2016-02-28 18:35:20
新闻前哨(2015年2期)2015-03-11 19:29:25
机械与电子(2014年2期)2014-02-28 02:07:46