人工势场法在路径规划中的应用
2019-10-20 18:02接文文郇宜军
大东方 2019年12期
接文文 郇宜军
摘 要:人工势场法由Khatib于 1986 年提出的一种基于人工势场概念的机械手和机器人的实时避障方法[1],由于其结构简单、直观等优点,在移动机器人运动轨迹优化和避障等方面得到了广泛的运用。本文介绍了人工势场法的基本原理,总结分析了其在路径规划中的缺陷,并对各个缺陷给出了相应的解决策略,对人工势场法在今后路径规划中的发展方向和前景进行了展望。
关键词:人工势场法;移动机器人;路径规划;缺陷
0 引言
现在路径规划技术已经成为智能化机器人、无人机领域的重要研究方向之一。路径规划指的是在具有障碍物的环境中,按照一定的评价标准(如:时间最短、路径最短、能耗最少等),移动机器人如何从所处的环境中搜索到一条从初始点开始到目标点的最优或次优路径[2]。目前路径规划方法主要有传统和智能方法两大类,传统路径规划方法主要有人工势场法、可视图法、栅格法等;智能化方法主要有模糊逻辑、神经网络、遗传算法、蚁群算法等。其中,人工势场法具有反应速度快、计算量小、便于实时性控制和生成的路径平滑等优点而得到广泛应用[3][4]。
1 传统人工势场法
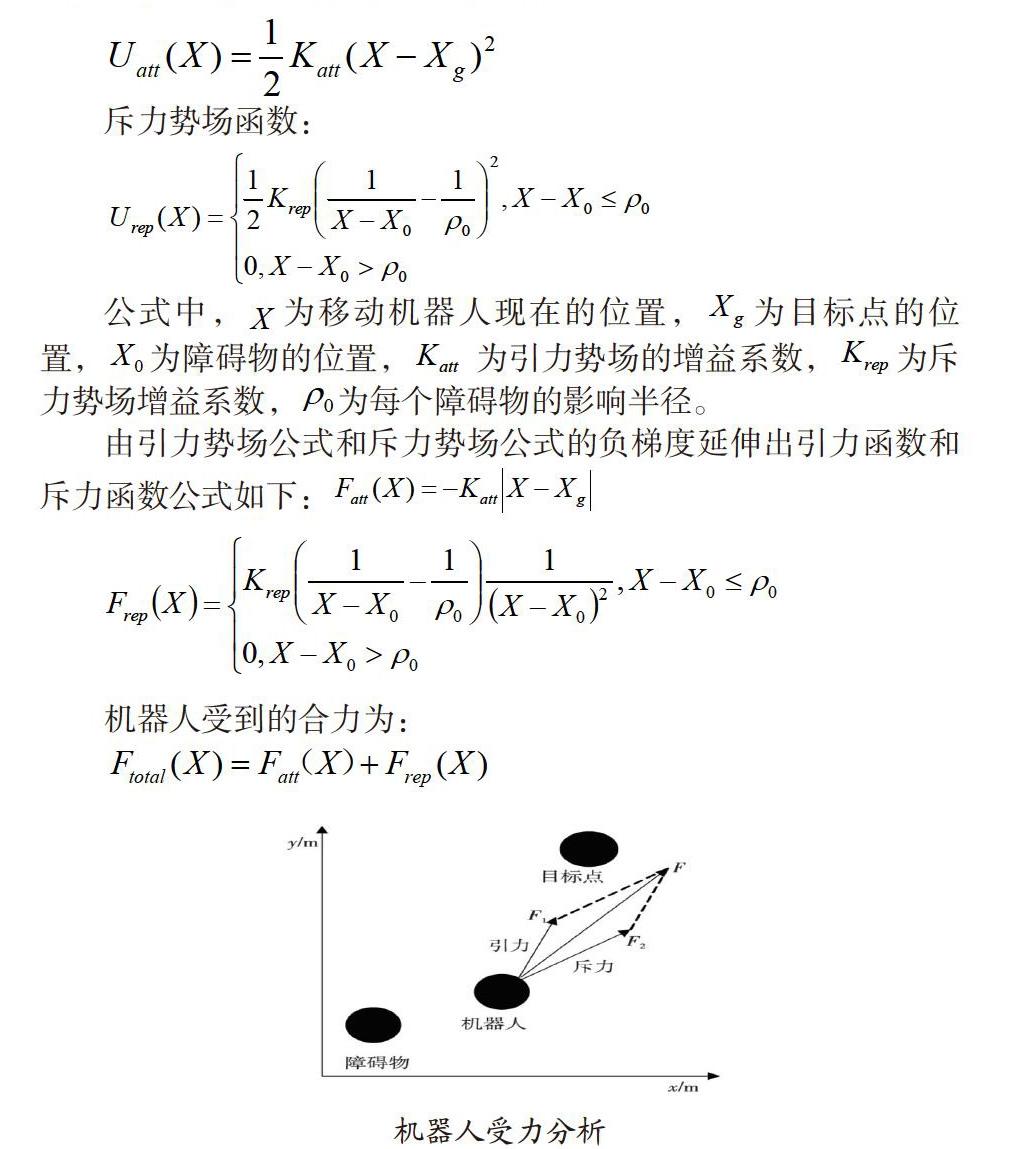
Khatib 于 1986年首次提出人工势场法,认为该方法是一种虚拟力法[1]。其思路是假设有虚拟的引力场和斥力场存在,二者的作用平衡使得移动机器人能够躲避障碍,就是将机器人在周围环境中的运动,设计成一种抽象的人造引力场中的运动,目标点对移动机器人产生“引力”,障碍物对移动机器人产生“斥力”,最后通过求合力来控制移动机器人的运动。终点的引力与移动机器人和终点的距离成正比;障碍和移动机器人之间的斥力与障碍和移动机器人之间的距离成反比。在二者的综合作用下,移动机器人会找到一个力的平衡点,从而生成一个从初始位置到终止位置的路径规划。这其中,引力势场函数为:
斥力势场函数:
公式中,为移动机器人现在的位置,为目标点的位置,为障碍物的位置, 为引力势场的增益系数,为斥力势场增益系数,为每个障碍物的影响半径。
由引力势场公式和斥力势场公式的负梯度延伸出引力函数和斥力函数公式如下:
机器人受到的合力为:
机器人受力分析
2 傳统人工势场法的缺陷
2.1 目标不可达问题
当移动机器人在目标位道产生的引力牵引下向目标方向移动时,障碍物就分布在目标左侧且相隔很近,对应的斥力递增,当斥力作用大于引力作用时,其合成的总作用力方向背离目标点,根据规划决策,移动机器人会背离目标点而去。背离目标点的同时也背离障碍物,因此移动机器人所受到的斥力递减,而目标点对移动机器人的引力随着距离的增加而递增,当引力大于斥力时,移动机器人又开始向目标位置靠近。如此反复,移动机器人在引力与斥力的作用下在目标位置点附近反复徘徊,从而导致目标不可达的问题。
2.2局部极小值点问题
人工势场法的另外一个缺陷是局部极小值,局部极小值又被称为局部稳定问题,具体是指移动机器人在环境中进行规划过程中,是以基于障碍的斥力势场与基于目标的引力势场的作用而驱动前进直至完成规划,由于障碍物分布的任意性与动态性,可能导致在环境中的某些局部区域,移动机器人所受到的斥力与引力作用达到平衡状态而陷入局部区域的稳定状态,此时将该斥力与引力平衡的势场点称之为局部极小值点。移动机器人一旦陷入局部极小值区域,由于斥力与引力达到平衡,大小相等而方向相反,移动机器人在人工势场中所受到的合力为零,没有驱动力来驱动机器人进行进一步的路径规划,移动机器人容易陷入局部最优解(停止移动)或震荡(反复移动),始终无法到达目标点。
3 解决缺陷的策略
传统人工势场法由于存在的各种局限问题,使得它的应用场景受到一些限制,很多工作环境无法应用人工势场法进行路径规划,因此目前学者们针对人工势场法的这些缺陷展开了研究与探讨,目前已有一些可行的改进策略。
3.1对目标不可达问题的改进
通过引入调和函数来解决目标不可达[5],由于调和函数是可微的,故可以保障机器人运动的轨迹的正确性;或者与其他算法相结合,通过将改进APF 算法与导航势场法结合的方法解决了目标不可达的问题[6];对势场函数进行改进,保证在目标点附近时引力作用占主导地位,将机器人与目标点的距离引入到斥力势场函数中[7][8],或者结合其他算法对人工势场法中的一些参数进行优化[9]。
3.2对局部极小点问题的改进
在改进的势场函数基础上,采用添加控制力的方法,使机器人逃脱局部极小点[10];或提出模糊斥力的思想,利用模糊逻辑控制算法来动态地调节斥力大小,使机器人逃离局部极小[11][12][13];或者通过增设虚拟目标点的方式引导机器人走出局部极小点[14][15][16];或将斥力旋转一定角度,解决合力为零问题,使机器人成功逃离极小点[8];特殊形状障碍物(如 U 型和 V 型,即容易使机器人陷入障碍物中难以走出)中的局部极小点可将其人为隔离出来[17],避免机器人陷入障碍物的半封闭区域;或通过“沿边走”来解决局部极小点和复杂障碍物环境下的路径规划问题[18]。
4 人工势场法在路径规划中的展望
人工势场法的原理简单,计算简便,但其固有的缺陷在一定程度上限制了它的适用范围。因此,为了更广泛地使用人工势场算法,我们需要对它进行更深入的研究。
4.1实际空间环境与势场相结合
在实际的空间环境中,由于机器人本身的体积大小、障碍物的尺寸大小以及障碍物分布环境复杂等情况,在进行路径规划时都需要考虑一些约束条件,传统的人工势场法中只考虑了机器人在引力和斥力作用下的运动,并未结合实际空间环境的情况下考虑机器人与环境道路的约束条件,导致最后规划出来的路径不一定适合机器人实际的运动情况,因此需要将关于机器人本身的条件、实际空间转化为约束条件与势场法结合,从而规划出一条更合理的路径。
4.2对势场函数的改进
在传统人工势场法中,当机器人到达目标点时,引力为零而斥力不为零,就会导致目标不可达的问题;当所有障碍物斥力的合力方向与引力的方向相同,而此时机器人又未到达目标点,就有可能出现斥力和引力相等而陷入局部最优。因此对势场函数的参数进行修正或者加入调节因子:建立更合理的势场;或对机器人的空间环境进行改进;或加入考虑速度的运动模型。考虑解决人工势场法的出现的目标不可达及局部极小点是改进传统人工势场法的关键。
4.3与其他算法相结合
人工势场算法在实时避障方面具有很大优势,但随着技术水平的发展,机器人的工作环境越来越复杂,工作范围越来越广,多个机器人的路径规划已经成为研究热点,传统的人工势场算法想要寻找全局最优的路径效果却并不太好,因此需要与其他算法相结合。王晓燕[19]等人就结合势场和蚁群算法,利用人工势场法重构启发函数,进行路径规划寻找最优解。
5 结语
本文主要介绍了传统人工势场法及其主要的缺陷与解决策略,同时对人工势场法在今后的研究与应用进行了展望,希望对以后人工势场法在路径规划中的研究有所帮助。
参考文献
[1]Khatib O.Real-time obstacle avoidance for manipulators and mobile robots [J].The International Journal RoboticsResearch,1986,5(1):90-98.
[2]张毅,等.移动机器人技术及其应用[M].北京:电子工业出版社,2007:208 - 218.
[3]杨兴,等.室内机器人路径规划研究[J].科学技术与工程,2016,16(15):240 - 245.
作者简介:
接文文,1992年07月,女,汉族,山东烟台,硕士,单位:山东科技大学,研究方向:物流工程。
(作者单位:1.山东科技大学;2.莱芜技师学院 )
猜你喜欢
设计(2020年24期)2020-01-25
现代职业教育·中职中专(2018年11期)2018-06-11
电子技术与软件工程(2016年20期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年26期)2016-11-25
中国市场(2016年36期)2016-10-19
科学与财富(2016年28期)2016-10-14
科技视界(2016年20期)2016-09-29
环球时报(2014-02-17)2014-02-17