
500 米口径射电望远镜圈梁结构解析与自动建模
2019-10-19 07:29赵正旭薛晓荣郭阳李东年钟谦张蜀新
现代计算机 2019年25期
赵正旭,薛晓荣,郭阳,李东年,钟谦,张蜀新
(1.青岛理工大学机械与汽车工程学院,青岛266520;2.石家庄铁道大学复杂网络与可视化研究所,石家庄050043;3.中国科学院国家天文台,北京100012)
0 引言
建筑是人类赖以生存、工作的人工环境。钢结构建筑是一种新兴产业,我国钢结构建筑的发展和应用滞后于国外,国内普遍偏向于建造大型的建筑,而这些大型建筑的背后就需要有好的钢结构[2]。复杂的钢结构建筑由于其设计想法和理念仅仅通过图纸不容易被理解和接受,而通过建模实现钢结构建筑的可视化可以很好地表达设计师的设计理念,设计师可以通过虚拟仿真技术实现钢结构建筑的虚拟仿真。在虚拟仿真的过程中,建模是最重要环节[3]。随着计算机技术、三维仿真技术、信息技术的高速发展,耗时而低效的传统手工建模建筑方法已经远远无法满足应用市场的需求,快速化、智能化、自动化的建筑建模方法已经逐渐受到人们重视[4]。而建于贵州黔南布依族苗族自治州平塘县克渡镇金科村的大窝凼的世界上最大口径射电望远镜(简称FAST),同样需要模型来传递天眼设计理念。天眼模型的圈梁部分由圆钢管和焊接异型构件组成,通过焊接球和节点板连接,尽管设计图已经给出了所有圆钢管和焊接异型构件的几何信息和截面信息,但是圆钢管和焊接异型构件尺寸不一,结构复杂,采用手动建模的方式不仅耗时耗力,而且建模精度不易控制,所以通过手动建模很难快速完成。
基于以上背景,本文将使用Blender 建模软件,利用Python 内建脚本实现Fast 圈梁三维模型的快速自动化构建,可以大大减少了手动建模的工作量,加快建模任务的进度。
1 建模环境
在计算机网络时代,信息安全对于国家安全有着至关重要的作用,网络是信息传递的媒介,操作系统作为网络安全的保障,也是国家信息安全的保障。FAST作为国家重大科技基础设施,我们将采用国产操作系统中标麒麟操作系统来进行建模。中标麒麟操作系统是一种采用Linux 内核的操作系统,安全性、稳定性、可靠性和免费性是Linux 的优点[5]。作为一个开源操作系统,中标麒麟有以下优点:
(1)强大的跨平台应用部署能力。
(2)强大的软硬件适配能力。
(3)强大的设备管理能力和多任务管理能力。
(4)高效、易用的桌面操作环境。
3DS Max 是一款非常好的3D 建模软件,它拥有性价比高、使用者多,上手容易的优点,但是它不兼容中标麒麟操作系统,所以我们选择了Blender 这一款开源的多平台轻量级全能三维动画制作软件。Blender 具有建模、雕刻、绑定、粒子、动力学、动画、交互、材质、渲染,音频处理,视频剪辑以及运动跟踪,后期合成等的一系列动画短片制作解决方案,并以Python 为内建脚本,支持yafaray 渲染器,同时还内建游戏引擎,商业创作永久免费。
2 工程概况
2.1 FAST背景
500m 口径射电望远镜(Five-hundred-meter-Aperture-Spherical-Telescope),简称FAST,为国家重大科学工程。FAST 建于贵州黔南布依族苗族自治州平塘县克渡镇金科村的大窝凼,贵州属于卡斯特地貌,有着得天独厚的地理优势,选取贵州山区洼地作为FAST 的台址,建造完成500m 口径射电望远镜。
FAST 目前是世界上第一大单口径射电望远镜,将在未来20 至30 年保持世界一流地位。天眼工程利用贵州喀斯特地区的洼坑作为望远镜台址,加之全新的设计思路,使其突破了望远镜的百米工程极限,开创了建造巨型射电望远镜的新模式。整体效果如图1所示。

图1 FAST整体效果图
2.2 FAST整体结构
FAST 整体结构由以下部分组成:
(1)主索:主索用于支承FAST 反射面板,主索网呈球面结构,以网格方式编织而成,球面直径为500m,总计6740 根。
(2)下拉索:索网通过下拉索与地面设置的促动器相连,促动器通过收缩和拉伸来控制下拉索,从而控制面板角度的变化,实现观测抛物面。
(3)格构柱与圈梁:用于支承主索网。
(4)格构柱基础:用于支承格构柱。
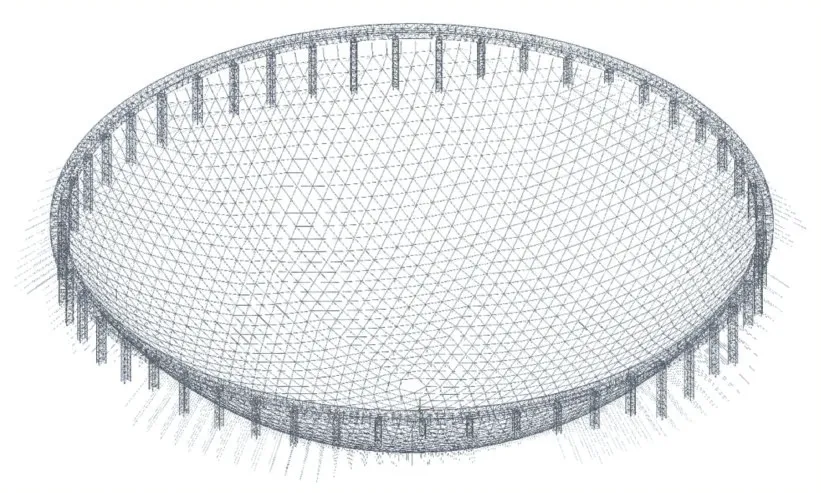
图2 FAST结构布置三维图
3 圈梁结构
3.1 圈梁整体结构
本文将对500m 口径射电望远镜天眼的圈梁部分进行建模,圈梁内圈直径500.8m,外圈直径522.8m,高5.5m,宽11m,为立体桁架结构,由圆钢管和焊接异型构件组成。圈梁布置分为A 区、B 区、C 区、D 区和E区,每个区左右跨度呈72 度角,5 个区的圈梁构件布置与构件截面具有1/5 旋转对称性。所以,圈梁的建模只需要建1/5 单元,剩余部分只需旋转复制即可。A 区结构由60 个单元组成,每个单元之间呈0.99-1.45 度,每个单元由上弦、下弦、上下弦间连杆组成。
圈梁建模将分为两个部分,圈梁主体部分和滑动支座建模。圈梁主体部分主要分为圈梁上弦构件,圈梁下弦构件,圈梁立面构件。圈梁上弦构件包括上弦环向弦杆,上弦径向弦杆,上弦面内斜腹杆。圈梁下弦构件包括下弦环向弦杆,下弦径向弦杆,下弦面内斜腹杆。圈梁立面构件包括上弦环向弦杆,环向斜腹杆,竖腹杆,径向斜腹杆。圈梁整体结构如图3 所示。

图3 圈梁整体结构
3.2 圈梁整体结构特点
圈梁钢结构主要由圆钢管、焊接球和焊接工字钢连接组成。由于工程实际需要,每个圆钢管、焊接球、焊接工字钢构件长度,尺寸不尽相同。圆钢管构件截面表如表1 所示。

表1
圈梁上弦构件可以分为A 区、B 区、C 区、D 区、E区5 个区,A 区可以分为60 个单元,每个单元的平面构件说明图如图4 所示。

图4 上弦平面构件说明图
圈梁下弦构件可以分为A 区、B 区、C 区、D 区、E区5 个区,A 区可以分为60 个单元,每两个单元对称分布,每两个单元的平面构件说明图如图5 所示。

图5 下弦平面构件说明图
圈梁立面构件可以分为A 区、B 区、C 区、D 区、E区5 个区,A 区可以分为60 个单元,每个单元的立面构件说明图如图6 所示。

图6 立面构件说明图
4 三维模型创建
圈梁三维模型的构建需要进行三方面工作:①圈梁构件数据的收集和处理。②通过Python 构建圈梁三维实体模型。③通过手动建模完成滑动支座部分模型。其中,构建圈梁三维实体模型需要Blender 内建脚本Python 的支持。Python 语言是一种面向对象、解释性的计算机语言,具有功能强大、语言简练的特点,它提供了大量运算、建模、仿真模块[6]。Blender 是一款三维动画制作软件,它可以实现跨平台,虽然Blender 这款软件简单小巧,但是它可以实现建模、渲染、动画等多种功能。而且Blender 支持Python 内建脚本,利用Python 可以实现圈梁模型的自动快速化构建。
4.1 数据收集和处理
首先,需要根据圈梁结构设计图,分解圈梁结构得到不同的构件类型,如连接杆件、焊接球、滑动支座等。并记录不同类型构件的数量、长度、尺寸以及连接方式。汇总所有信息生成Excel 文件并保存。
4.2 圈梁建模
要想通过Python 是实现圈梁的建模,关键在于能够表示每个构件的中心点坐标,和它相对于初始位置的旋转角度。我们以h1 立面的下弦环向弦杆为例,介绍如何通过数学的方法建立模型。简化模型如图7所示。

图7 下弦环向弦杆简化图
图中AB 代表下弦环向弦杆,下弦环向弦杆长度已知,C 为AB 中点,OA 和OB 代表圈梁内圈半径,半径长为250.4m。图中已知圈梁半径OB 和下弦环向弦杆长度AB,勾股定理可以得到角度AOB 和角度COB 和OC 长度,角度COX 可以表示出来,已知角度COX 和圆心到下弦环向弦杆中心的距离OC,通过这两个已知量可以求得AB 中心点C 的坐标。然后需要知道下弦杆的旋转角度,新建下弦杆的默认初始位置垂直于X轴与Y 轴所在平面,在C 点建立一根圆柱,然后将圆柱绕X 轴旋转90。,再绕Z 轴旋转角度COX,这样AB 下弦环向弦杆的位置和旋转角度就可以确定了。每一个下弦环向弦杆的中心点坐标和它相对于初始位置的旋转角度就都可以得到,通过Python 代码循环的建立每一个构件即可得到跨度为72。的下弦环向弦杆。下弦环向弦杆在H1、H2、H3 立面共有3 个圆环,3 个圆环建模原理相同,实际建模模型如图8 所示。

图8 下弦环向弦杆
接下来是下弦焊接球和下弦径向竖杆的建模过程。简化模型如图9 所示。
CD 表示下弦环向弦杆,C 点和D 点是焊接球的位置,AC 和BD 代表下弦径向竖杆,长度为5.5m,可以利用图7 中求得的角度和已知的OC、OD、AC、BD 长度分别表示C 和D 点焊接球以及AC 和BD 下弦径向竖杆的坐标。接下来需要确定AC 径向竖杆的旋转角度,首先在AC 中点新建圆柱,圆柱默认位置垂直于X 轴和Y 轴所在平面,将圆柱以Y 轴为中心旋转90。,再以Z轴为中心旋转角度AOX。已知中心点坐标和旋转角度,利用Python 代码实现模型构建。
接下来是下弦面内斜腹杆的建模,下弦面内斜腹杆简化模型如图10 所示。
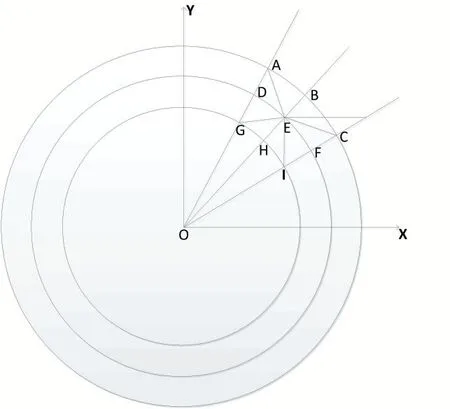
图10 下弦面内斜腹杆
AE、CE、GE、IE 表示下弦面内斜腹杆,长度已知,OG 表示圈梁内圈半径,OA 表示圈梁外圈半径,以CE斜杆为例,首先需要找出CE 斜杆的中心点坐标,OC 和OE 长度已知,由图7 易知,角度EOX 和角度COX 可以求得,通过OC 和OE 长度以及角度EOX 和角度COX 可以求得C 点和E 点的坐标,通过E 点和C 点的坐标可以求出求出CE 中心点的坐标。已知BC、BE、CE 的长度,通过余弦公式,易求得角度BEC。先在CE中心点坐标建一根圆柱,然后绕Y 轴旋转90。,再绕Z轴旋转角度BOX,再绕Z 轴负方向旋转角度BEC,即可得到CE 下弦面内斜腹杆。AE、GE、IE 建模原理相同,实际建模模型如图11 所示。
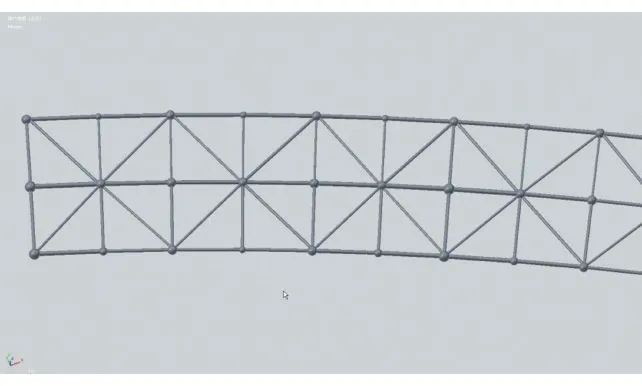
图11 下弦模型
圈梁上弦构件、下弦构件和立面构件建模原理基本相同,最终圈梁主体部分的三维模型如图12 所示。
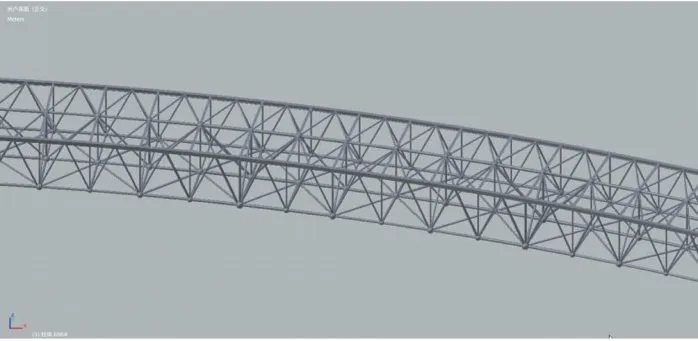
图12 圈梁模型
4.3 圈梁滑动支座建模
(1)滑动支座
圈梁与格构柱之间通过滑动支座连接,滑动支座共100 个,分别位于50 个格构柱顶。滑动支座作为圈梁的支承结构,主要为了解决格构柱高度分布不均匀对整体结构刚度的影响,通过滑动支座释放圈梁的环向约束。
(2)滑动支座结构
滑动支座包括圈梁与格构柱支撑节点以及圈梁与格构柱滑动连杆。支撑节点结构简单,包括加劲板、圆管、拉索耳板、主索、双向滑动支座。滑动连杆包括圆管、节点耳板、杆端封板、水平连杆、单耳板、加劲板。水平连杆长度根据放样决定。
(3)滑动支座的建模
滑动支座的建模需要找准每个物体相对于坐标原点的位置,以及每个物体的尺寸大小,然后把各个物体组装起来。有一些特殊形状的物体需要用到布尔工具,Blender 中的布尔修改器可以在模型之间计算得出新的物体,可以得到模型之间交集、并集、差值后的模型效果。其中双向滑动支座的建模需要用到布尔操作,新建两个圆柱,通过布尔差值运算得到双向滑动支座底座。圈梁与格构柱支撑节点中的6 块加劲板,前后左右对称,可以通过旋转复制得到。其实际建成模型如图13 所示。

图13 滑动支座模型
5 结语
FAST 是目前世界上最大的单口径射电望远镜,拥有中国自主知识产权,它的设计体现了我国自主创新能力和综合国力。FAST 圈梁结构是望远镜的索网的之承结构,本文对FAST 圈梁结构的建模是基于中标麒麟国产操作系统,在开源的三维动画制作软件中,利用Python 内建脚本建模和手动建模方法相结合,在数据信息翔实的情况下,可以对圈梁模型进行快速构建,大大提高了建模效率。然而,本文对FAST 圈梁的建模依然有它的局限性,因为它只适合于有规律可循的模型构建,对于结构复杂,无规律可循的模型还需要去找寻其他的建模方法。
猜你喜欢
钢管(2022年2期)2022-11-28
世界有色金属(2022年13期)2022-10-21
交通世界(2022年27期)2022-10-17
船舶力学(2022年7期)2022-07-25
辽宁工业大学学报(自然科学版)(2022年1期)2022-01-15
船海工程(2021年6期)2021-12-17
建材发展导向(2021年15期)2021-11-05
意林(绘英语)(2018年1期)2018-04-28
科技资讯(2016年18期)2016-11-15
建筑工程技术与设计(2015年5期)2015-10-21
