
机载显示器亮度自动调节算法验证及优化
2019-10-17 06:08:50朱沛立常志刚
液晶与显示 2019年9期
朱沛立,常志刚
(太原航空仪表有限公司,山西 太原 030006)
1 引 言
机载显示器是飞机座舱显控系统重要的人机接口设备,其所处的光环境十分复杂。飞机航行过程中,随着其进行轴线滚动、垂直翻滚或者切入厚云层等飞行动作[1],在显示器环境光照度快速变化情况下,驾驶员可能会因来不及手动调节亮度而造成视盲。为了解决视觉疲劳、视盲等各种问题,提高显示器的显示质量和舒适度[2],显示器亮度自动调节功能应运而生。
当前的亮度自动调节方式是基于韦伯-费希纳定律的亮度自适应调节算法。韦伯-费希纳定律给出了人眼受到某些刺激时,人眼主观亮度与环境光光源照度之间的关系,即人眼的主观亮度与光源照度的对数成正比。经视觉工效试验得出,采用基于韦伯-费希纳定律作为自动调光算法的机载显示器,其亮度随环境光变化的显示效果,能够使驾驶员清晰而舒适地获取显示器上的信息[3]。随着具备自动调光功能机载显示器的批量交付,人们发现大部分显示器在某环境光照条件下的实际亮度与标准亮度值误差远远大于3%,容易造成驾驶员视觉疲劳。经研究发现,机载显示器的自动调光功能是由环境光测试转换电路和LED背光调节控制电路实现的,由于器件选型、信号布线等差异,会使环境光到电信号转换和LED背光的调节控制电路等存在偏差,导致实际的自动调光曲线偏离基于韦伯-费希纳定律的标准调光曲线,造成显示器自动调光效果不佳。
针对上述问题,本文首先介绍了太原航空仪表有限公司显示器的亮度自动调节模块的工作原理及其采用的调光算法,详细介绍了该公司设计的一套显示器环境光-亮度测试系统,设计开发了专用的测试软件,该系统可以完成机载显示器自动调光功能的测试、数据分析、曲线绘制和算法优化等工作,使显示器的亮度自动调光功能满足设计要求。
2 工作原理及调光算法
2.1 模块的工作原理
显示器亮度自动调节模块由环境光照度测试单元和亮度调节控制单元组成[4]。环境光照度测试单元利用光敏传感器测试驾驶舱内环境光照度,依据电压-照度模型将光信号转换为与之相对应的电信号,再经A/D电路转换为数字信号; 亮度调节控制单元接收到环境光照度测试单元转换的数字信号,根据环境光-亮度曲线计算出显示器相应的亮度值,经D/A电路转换为模拟信号[5],背光控制板接收、解析信号后控制LED灯板,给出与亮度值相应的背光亮度[6]。
显示器亮度自动调节模块原理框图如图1所示。
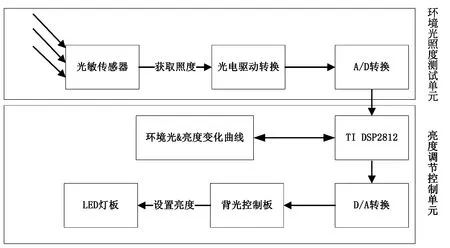
图1 亮度自动调节模块原理框图Fig.1 Principle diagram of brightness automatic adjustment module
2.2 亮度自适应调节算法
(1)韦伯-费希纳定律[7]
韦伯-费希纳定律指出人的一切感觉,包括视觉、听觉、肤觉(含痛、痒、触、温度)、味觉、嗅觉、电击觉等,都遵从感觉与对应物理量强度的对数成正比的法则,即
S=KlgR+K0,
(1)
式中:S是感觉强度,R是刺激强度,K、K0是常数。
人眼的感觉亮度与环境光刺激之间也符合韦伯-费希纳定律。为了适应人眼,需要将显示器亮度调整到与人眼感觉亮度相一致,即显示亮度与环境光照度之间符合韦伯-费希纳定律。
B=KlgI+K0,
(2)
式中:B是人眼的感觉亮度,I是环境光照度。 其中B(人眼感觉亮度)通过光谱彩色亮度计测量显示器得到,I(环境光照度)通过照度计测量光敏传感器处的环境光照度而得到。
(2)亮度自适应调节算法
在式(2)基础上,将显示器亮度用百分比表示,即
(3)

当环境光照度减小和增大时,显示器亮度也随之以对数比例减小和增大,该算法称为亮度自适应调节算法。
3 环境光-亮度测试系统
环境光-亮度测试系统是在原有光学性能测试系统基础上,通过增加可程控环境光源、光源夹持装置和测试软件来实现对被测样品的自动调光功能测试、亮度自适应算法验证和优化[8-10],其原理框图如图2所示。
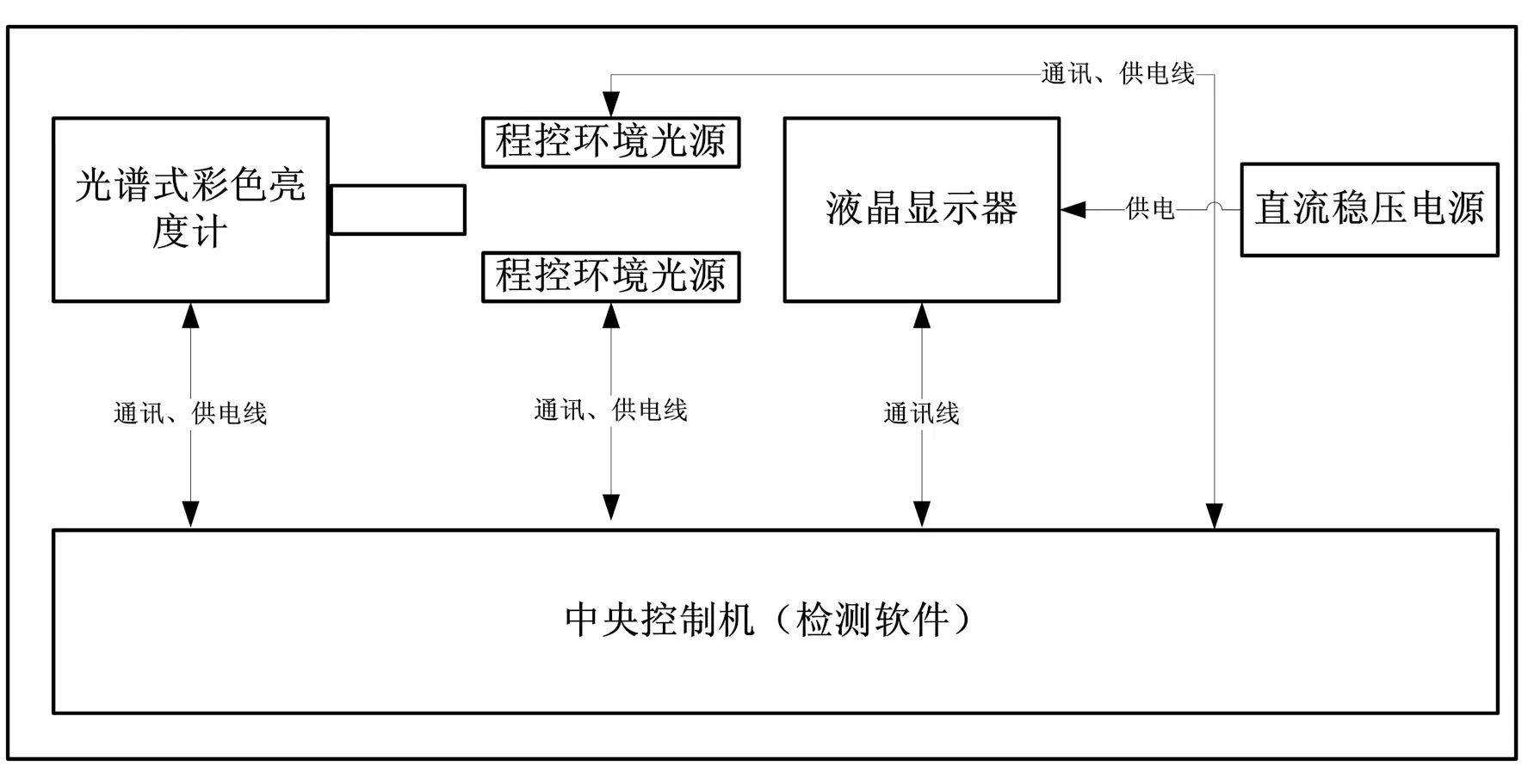
图2 环境光-亮度测试系统原理框图Fig.2 Principle diagram of the ambient light-brightness test system
3.1 光学性能测试系统
图3为该公司现有的光学性能测试系统外形图。它主要由精密五维机械移动转台、光谱彩色亮度计和控制软件组成。系统可用于测量76.2~812.8 mm(3~32 in)液晶显示屏的亮度、色度、均匀性、对比度和视场角等光学参数。

图3 光学性能测试系统外形图Fig.3 Outline diagram of optical performance testing system
3.2 可程控环境光源
可程控环境光源是一种可以通过远程程序控制改变光照强度的环境光源,可以根据环境光-亮度关系模型,通过软件控制动态模拟座舱不同光照强度的环境光。
测试系统选用的可程控光源是由杭州远方公司研制的CL-2018,光源可提供的照度范围:0~107 600 lx,具有精度高、范围广和高灵敏度等特点,能很好地满足环境光-亮度变化测试的要求,图4为其实物图。

图4 可程控环境光源实物图Fig.4 Physical diagram of programmable environmental light source
3.3 光源夹持装置
光源夹持装置是用于固定和移动光源位置而设计的,因被测机载显示器尺寸不同,光敏传感器的位置也就不固定,夹持装置可以上下左右四个方向移动。系统配备有两个光源夹持装置,分别固定安装在被测样品的两边并对准光敏传感器,实际安装位置见图5。
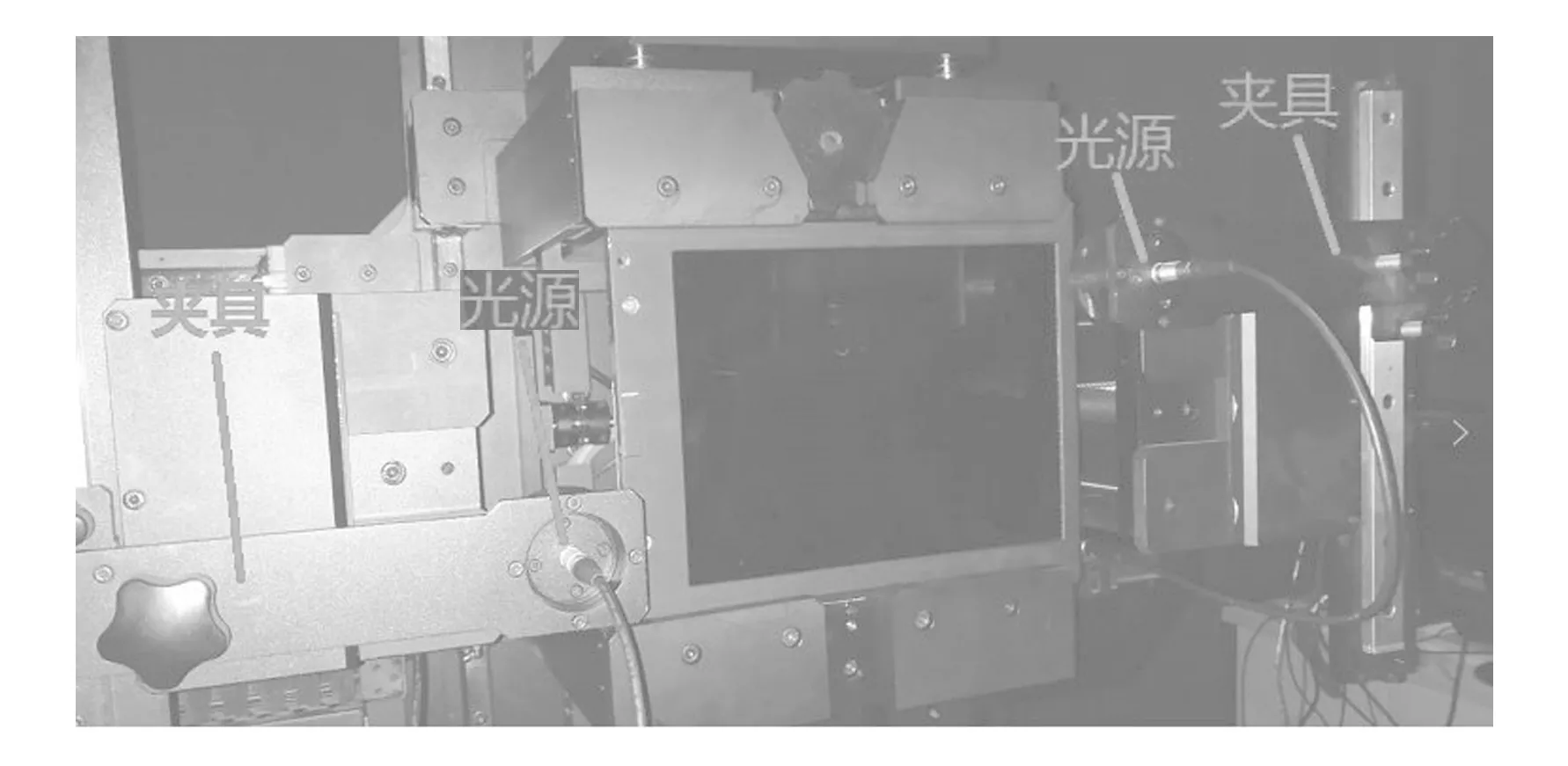
图5 光源夹持装置位置图Fig.5 Graph of fixed light fixture position
3.4 测试软件设计
3.4.1 软件结构
测试软件选用Visual Studio 2010为开发平台,使用C++编程语言,采用模块化设计方法,软件主要由参数设置模块、系统测试模块、图形绘制模块和算法优化模块等4个模块组成,测试软件通过以太网总线通讯方式,实现上位机与光谱彩色亮度计和可程控环境光源之间的通讯。图6为软件组成结构图。

图6 软件组成结构图Fig.6 Structure diagram of software composition
3.4.2 软件程序流程
软件启动后,首先对网口进行初始化,建立通信链路,然后设置测试参数,开始测试,测试后对数据进行整理和曲线绘制,数据整理完毕后,开始对数据和曲线进行分析和算法系数优化;优化后,再次进行实验测试,经多轮测试直到环境光-亮度变化曲线接近标准变化曲线,完成显示器亮度自动调节算法验证和优化工作,结束测试。
软件流程图见图7,具体实现如下:
(1)通讯建立:初始化Socket套接字,完成上位机与光谱彩色亮度计和可程控光源的通讯建立工作;
(2)参数设置:设置光源起始、终止照度值,环境光变化方向,环境光变化量等参数;
(3)启动测试:根据参数设置,开始自动调光功能测试和环境光-亮度变化曲线的绘制;
(4)控制输出特定强度环境光:根据设定的起始测试环境光照度值和环境光变化量值开始测试,控制程控光源输出该照度值;
(5)采集被测样品显示亮度:被测样品根据环境光强,改变自身显示亮度,通过光谱彩色亮度计采集实时显示的亮度;
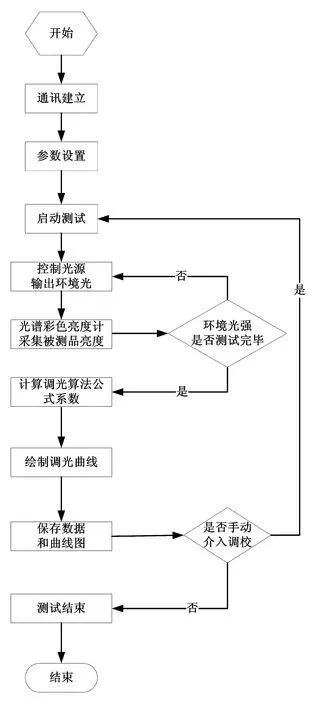
图7 软件设计流程图Fig.7 Software flow chart
(6)改变环境光强:根据参数设置,控制可程控环境光源依次输出每一个测试点要求的环境光照度;
(7)重复步骤(4)~(6),重复测试,直至所有测试点测试完毕,结束重复测试;
(8)计算调光算法公式系数:通过重复测试得出的每组环境强和显示亮度值,利用最小二乘法,计算得出式(3)中的K'和K'0;
(9)绘制调光曲线:绘制每次测试数据的环境光-亮度变化曲线;
(10)数据、曲线保存:对本次得出的测试数据和曲线图进行保存;
(11)再次循环测试重复步骤(3)~(10):手动介入改变被测样品亮度,计算手动介入后的亮度自动调节算法公式系数,再次启动测试,否则,结束测试;
(12)结束测试:完成曲线绘制和调光算法系数的计算,并给出系数是否在合理区间的建议。
4 算法验证和优化实验
4.1 实验准备
在光学暗室环境条件下对显示器进行亮度自动调节功能测试,完成环境光-亮度标准曲线绘制、亮度自动调节算法验证和算法优化工作,将被测显示器、光谱彩色亮度计、光源夹具和可程控光源固定安装好,并将可程控光源对准被测样品的光敏传感器,连接好各仪器供电线和通讯线,启动测试系统,开始测试。
首先手动调节被测显示器亮度到最大,用光谱彩色亮度计测的其亮度值为1 000 cd/m2,即得到式(3)中Bmax= 1 000 cd/m2。
4.2 环境光-亮度标准曲线
为了确定式(3)中的K'和K'0的值。选择108名战斗机飞行员作为实验对象,年龄25 ~ 42岁,飞行时间350~2 800 h。裸眼视力不低于0.8,色觉正常,明暗适应功能正常,夜航时间不少于50 h。
在实验室环境中,设置被测显示器亮度为手动调节模式,通过可程控环境光源来模拟太阳光形成不同的照度环境,将被测显示器置于该环境中,在某一照度下,让飞行员去观察显示器的亮度,调节显示器亮度比例直至飞行员感觉舒适为止,记录此时的照度值和显示器亮度。调整光源照度,重复同样的试验,记录不同组照度值和显示器亮度,利用最小二乘法计算得出K'=25,K'0=10。图8为环境光-亮度变化标准曲线。
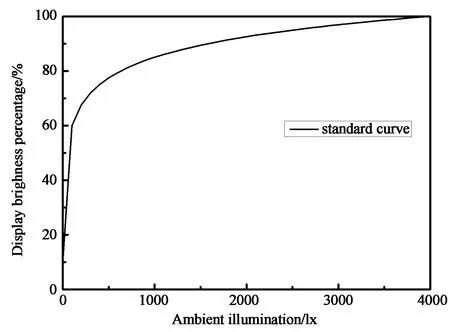
图8 环境光-亮度变化标准曲线Fig.8 Standard curve of ambient light-brightness changes
4.3 算法验证
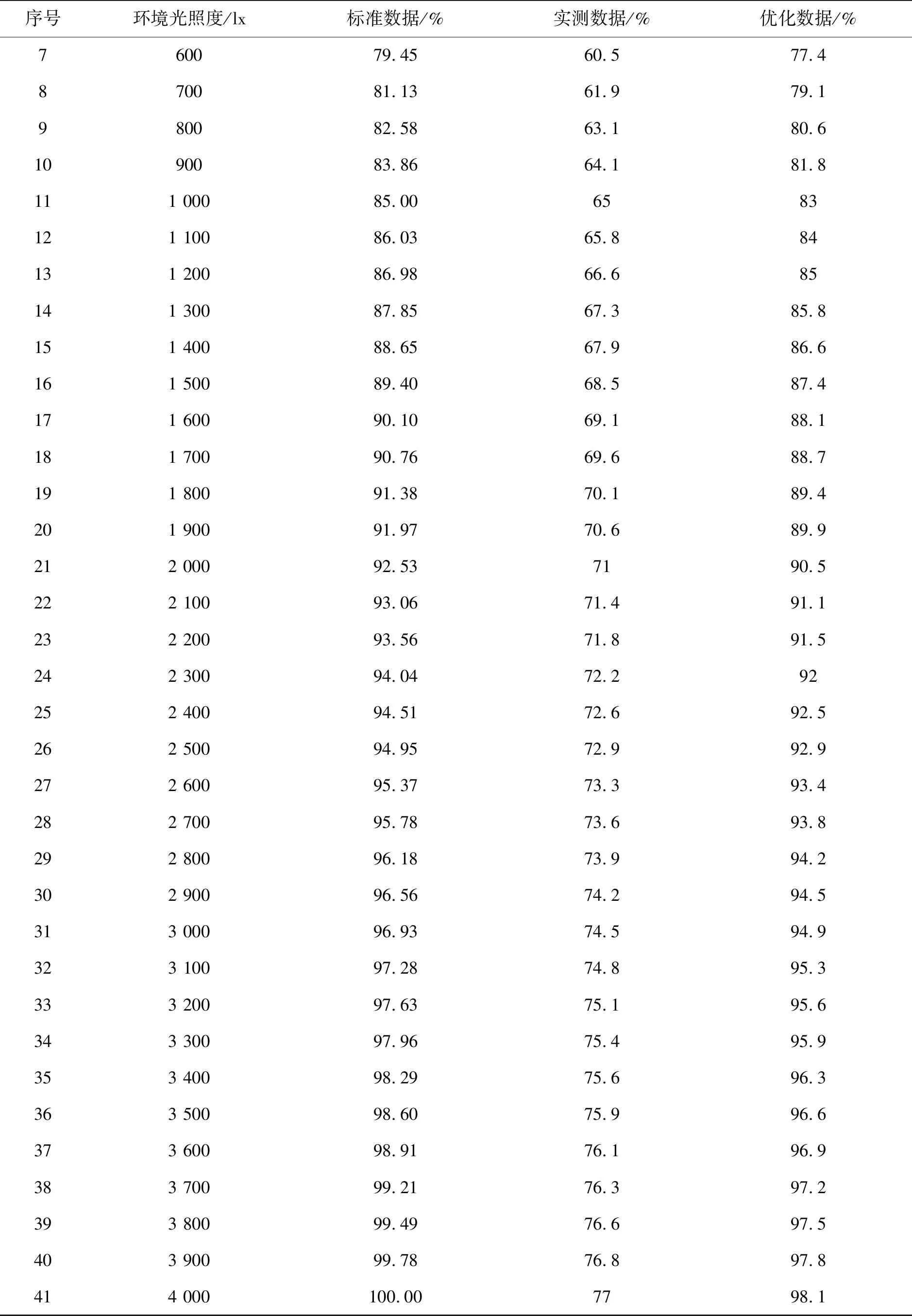
(1)标准数据:首先依据式(3),在系数K'=25,K'0=10,Bmax= 1 000情况下,通过计算,得到表1中不同环境光照度下显示器亮度的标准数据;
(2)验证测试:依据式(3),将每一个环境光照度值设定为一个测试点,环境光照度从小到大进行变化,测试对应的显示器亮度,其中起始环境光照度值为0 lx,环境光变化增量为100 lx,最大环境光照度值为4 000 lx。
通过计算和测试得到的数据结果如表1所示。同一环境光照度下的实测亮度与标准亮度误差远远大于3%,不能满足用户要求。
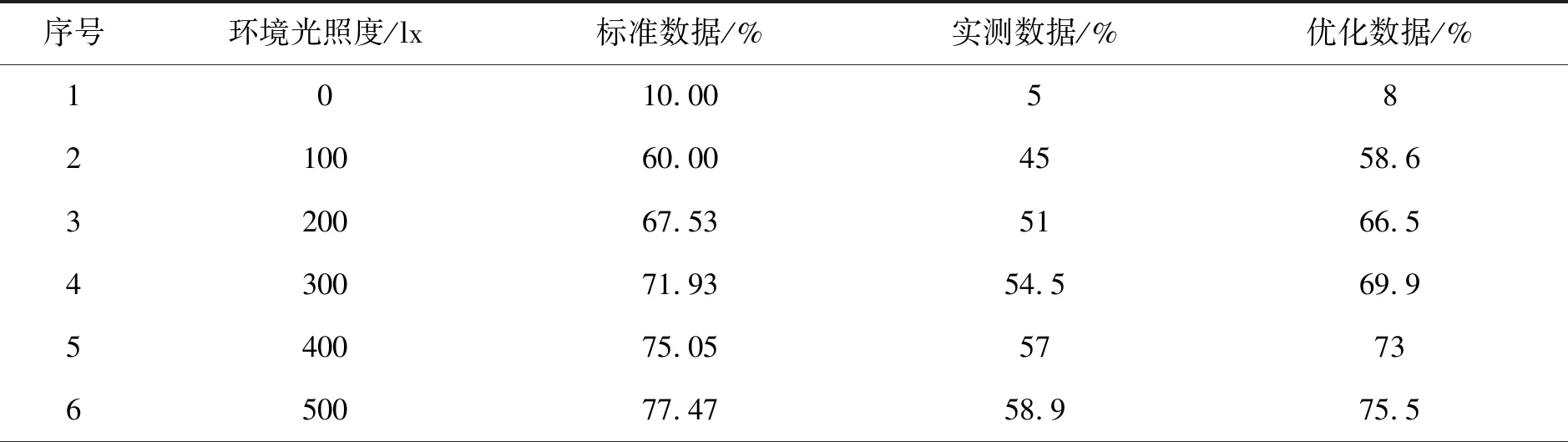
表1 算法验证和优化的实测数据结果(当前亮度/最大亮度)Tab.1 Results of the measured data of the algorithm verification and optimization(Current brightness/Max brightness)
续 表
依据表1中的数据绘制环境光-亮度变化曲线,如图9所示。

图9 环境光-亮度变化曲线Fig.9 Curves of ambient light-brightness change
4.4 算法优化
4.4.1 优化要求
通过算法优化工作,使显示器环境光-亮度变化实测数据曲线接近标准曲线,同一环境光照度下的实测亮度与标准亮度误差小于3%。
4.4.2 算法系数分析
根据式(3)可知,显示器的亮度与环境光照度值的对数成正比,其系数分别为K'和K'0。
(1)K'是环境光-亮度变化曲线的斜率:曲线上某点的斜率反映了此曲线的变量在此点处变化的快慢程度,即X轴上单位环境光照度所对应的Y轴上亮度变化快慢程度;
(2)K'0是环境光-亮度变化曲线的变化常数:即K'相同的情况下,X轴上相同环境光照度所对应的Y轴上亮度值不同。
4.4.3 优化方法
通过4.4.2节对算法系数分析后,采用如下优化方法:
(1)根据环境光-亮度变化实测数据及标准数据绘制曲线后;
(2)观察实测曲线与标准曲线的坡度是否一致,如果实测曲线坡度小于标准曲线坡度,则需要将实测曲线斜率K'值变大,反之,需要将K'值变小;
(3)观察曲线X轴上相同环境光照度所对应的Y轴上实测亮度值和标准亮度值是否一致,如果实测亮度值小于标准亮度值,则需要将实测曲线变化常数K'0值变大,反之,需要将K'0值变小;
4.4.4 算法优化
依据4.3表1中的数据及环境光-亮度变化曲线图,运用4.4.3所述的优化方法,对K'、K'0进行多次调整并进行相应的验证测试,得出最优系数K'=30,K'0=13,同一环境光照度对应的实测亮度与标准亮度误差均小于3%,这时环境光-亮度变化实测曲线与标准曲线基本一致。
最优一组优化数据见表1,图10为实验数据曲线图,包括环境光-亮度变化标准曲线、首次实测曲线和最优优化曲线。
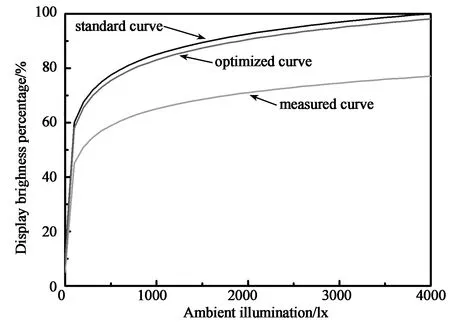
图10 实验数据曲线图Fig.10 Curves of experimental data
5 结 论
本文设计搭建了显示器环境光-亮度测试系统,对显示器亮度自动调节功能进行了算法验证测试和算法优化。实验结果表明:优化后的环境光-亮度变化曲线接近标准曲线,同一环境光照度对应的实际亮度值与标准亮度值误差低于3%,满足设计要求,解决了太原航空仪表有限公司机载显示器自动调节功能存在的问题。目前该测试系统及算法验证和算法优化方法已经广泛应用于该公司的产品设计和测试。
猜你喜欢
液晶与显示(2024年1期)2024-01-31 06:13:28
传感器世界(2022年7期)2022-10-12 09:11:22
湖北农业科学(2022年12期)2022-07-21 09:43:14
中国交通信息化(2020年5期)2021-01-14 01:49:02
计算机研究与发展(2019年2期)2019-02-20 08:47:28
测控技术(2018年5期)2018-12-09 09:04:36
中国交通信息化(2018年9期)2018-11-09 01:09:20
江苏农业科学(2018年15期)2018-09-10 07:11:24
电子制作(2017年17期)2017-12-18 06:40:52
发光学报(2017年5期)2017-06-01 11:29:34
