基于西门子PLC的风电机组主控冗余系统的概述与研究
2019-10-16 07:36韦永清
通信电源技术 2019年9期
韦永清
(西门子(中国)有限公司,上海 200082)
1 被控系统要求
1.1 风机主流程
1.2 偏航系统
根据风机状态和风向进行机舱对风角度的调整,追踪最大风能。同时,根据电缆缠绕进行扭缆保护和自动润滑系统控制等。
1.3 变桨监控系统
根据主控算法进行变桨角度的调节命令发送和状态监测,同时根据变桨反馈的状态信息进行风机保护。
1.4 控制算法
基于转速及转矩进行控制策略实现,控制风机运行在稳定的主轴转速下,同时尽量提高整机发电量。
1.5 变流器监控系统
根据主控算法进行变流器转矩的调节,同时根据反馈的状态信息进行变流器监控。
1.6 控制系统诊断
根据控制系统硬件及通信运行状态进行控制系统诊断,诊断模块运行状态和通信状态。
1.7 辅助系统监控
针对辅助系统进行监控,如液压站、润滑系统、配电系统以及风速风向仪等传感器系统。
2 风机控制系统整体架构
风机控制系统主要由嵌入式控制器IPC427E、Software Controller软PLC控制器、IO从站ET200SP、CANopen网关模块、以太网交换机和Pro fi net网络构成。IPC427E作为控制系统核心,运行风机控制系统程序,通过Pro fi net RT实时以太网连接IO从站。IO从站分布在塔底和机舱两个部分。IO从站可配置不同类型的输入输出模块,实现不同传感器及执行器的接入。因为塔底和机舱之间距离较远,所以通过以太网交换机实现光纤和以太网的交换,从而连接风机塔上和塔下两部分。因为风电行业很多设备基于CANopen通信总线,因此通过配置西门子CANopen网关,实现与第三方智能设备之间的通信。同时,可以通过配置Pro fi bus网关,实现Pro fi bus总线连接其他设备。整体硬件结构如图1所示。
在实施规模经营以后,合作社按照对每个地块竹林按照社员入社登记的采伐做工,测算出每50 kg平均采伐做工成本,再将竹林采伐作业承包给安徽采伐队,每50 kg竹材采伐成本低于测算平均采伐成本2元左右,集约经营降低了成本。合作社与孝丰拉丝厂签订长期竹材供应协议,平均每50 kg大毛竹高于市场价格1.5元左右,小毛竹销售价格高于当地收购价5元/50 kg,正6寸、正7寸毛竹高于市场价格16元/50 kg销售到德清县三脚河市场,规模销售增加了收益。
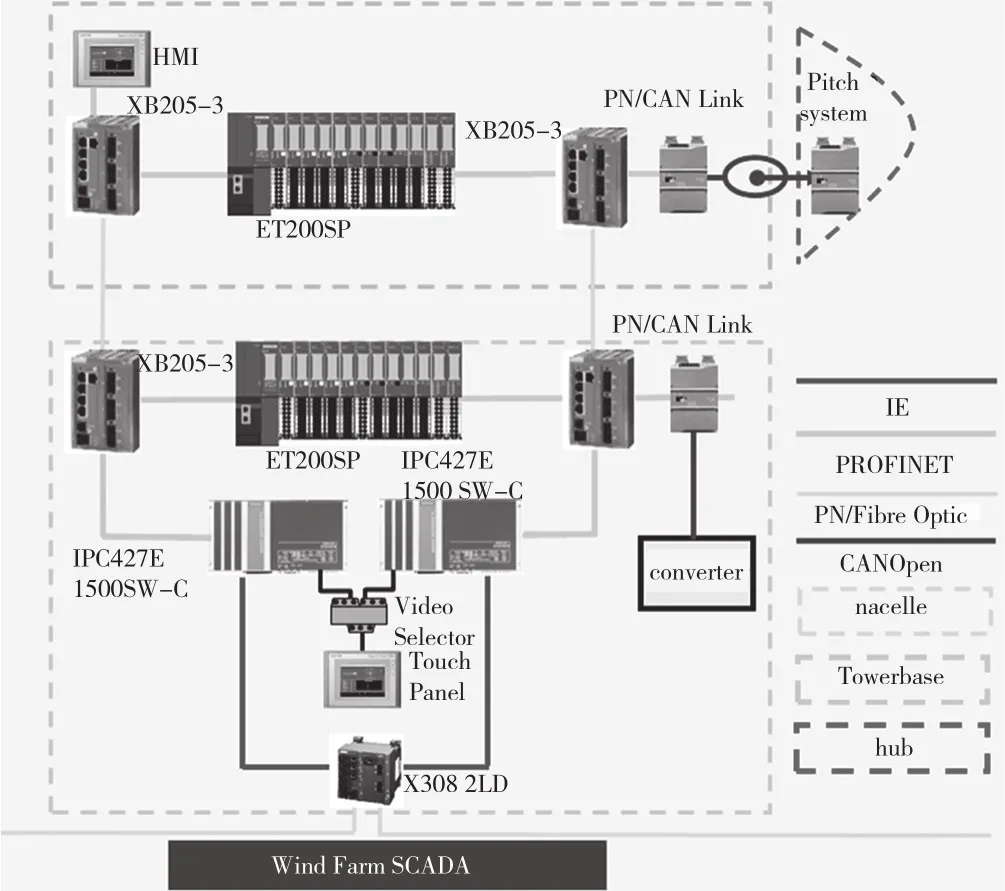
图1 硬件结构
3 冗余系统介绍
3.1 控制器冗余
控制器包括2个IPC427E控制器。它们具有相同的软硬件结构,同时运行相同的主控系统程序。其中,一个作为工作控制器,另一个作为备用控制器。当一个控制器被设置为工作状态时,另一个控制器必须为备用状态。工作状态和备用状态可以互相切换。
3.2 通信冗余
通信设备部分包括4个交换机:2个放置于风机塔底,连接塔底部分的Pro fi net设备和2个PC-Base控制器,2个交换机之间采用网线连接;2个光纤交换机放置于风机机舱,用于连接机舱内的Pro fi net设备,2个交换机之间采用网线连接。机舱交换机与塔底交换机之间采用光纤连接,构成通信冗余系统。当一条光纤回路故障或某个交换机故障时,机舱与塔底的通信仍可通过另一回路实现。交换机均为支持环网通信的交换机。
3.3 冗余系统的切换
工作控制器和备份控制器之间的数据同步通过通信完成。同步的数据包括过程映象输入、字节寄存器以及风机运行的过程数据。工作控制器在每个运行周期(20 ms)内实时将主控系统程序的运行过程数据传送给备用控制器,以保证备用控制器和工作控制器之间数据的一致性。当工作控制器发生故障时,备份控制器自动切换为工作控制器,从而实现对风机的控制。图2为冗余系统数据切换原理。

图2 冗余系统数据切换原理
4 控制系统软件开发和V型设计模式
目前,大多数风力发电机生产厂家还处于传统的制造业模式中,缺少数字化设计理念,产品的仿真环节与设计环节不统一。很多厂家缺少系统建模及仿真,或者系统的建模和仿真不能给后期的系统设计提供数据依据,不能构成闭环过程。此控制系统软件架构的意义在于为风电OEM客户提供一套完整的数字化主控系统开发的解决方案,加快客户新机型的研发速度,降低样机调试的故障率,节省样机开发成本。
现阶段,行业内很多企业已经开始从L型产品研发设计生产模型转变为V型设计模式。V型设计模型最重要的两个环节是软件在环和硬件在环。这两个环节可以大大缩短产品研发周期,增强产品出厂前的可靠性。对应到风电行业最重要的控制问题,是如何快速开发控制算法并应用于系统测试环节,同时完成控制策略在真实硬件环节中的测试。本套控制系统可根据客户以往的开发模式进行V型设计转变,通过硬件及软件架构为软件在环和硬件在环提供支撑。
V型设计模式涉及的各个环节的定义如下。
(1)系统定义阶段.通过确定项目开发规范,完成软件、硬件设计的开发文档,明确控制系统要求,定义硬件功能和柜体结构等。
(2)设计、仿真阶段。通过开发软件对系统进行设计,设计完成后对控制系统进行建模,重点是对控制对象和控制逻辑进行设计开发,通过在设计阶段的软件建模帮助设计人员早期处理系统设计缺陷。
(3)快速原型阶段,又称为软件在环。通过控制系统的PLC SIM Advance软件,加载设计阶段完成的软件部分,将无法在软件仿真阶段验证的算法等在此阶段的硬件仿真平台下进行执行和测试,同时配合软件环境中的仿真传感器和执行器等。此阶段由研发工程师进行相关测试,可以帮助研发设计人员处理系统指标和误差等问题。
(4)代码生成和软件测试阶段。系统经过软件在环测试后,整套控制系统的软件开发平台可以将所有的项目代码进行发布操作,将程序下载到控制系统的真实CPU中,并对代码执行情况进行完整的执行性情况测试和分析。此阶段通常在客户实验室中进行。
(5)硬件在环阶段。此阶段系统需要连接所有的PLC硬件模块、外部传感器和IO。CPU通过一套完整的硬件在环仿真器,测试控制系统的软件和硬件在各种工况下的运行情况,以检验其功能是否满足设计需求。此阶段通常在客户实验室中进行。
(6)系统标定和功能测试阶段。上一阶段测试后,再度完善系统的软件、硬件结构功能,将修正和改善后的控制器连接在真实硬件上。此阶段通常为风机的厂内调试,通过厂内测试进一步完善设计,出厂前整改发现的问题。
(7)现场测试阶段。此阶段完成风机的调试,并持续进行优化。根据现场将数据反馈给前端设计,为后续机型的设计和同类机型的优化积累宝贵数据基础和经验。
5 系统开发工具
开发好的风机模型和风机控制算法在Matlab Simulink中进行仿真,然后通过Simulink的Code Generator功能生成代码,通过西门子工程环境TIA Portal的ODK组件进行代码移植和导入,从而实现代码的自动生成。其中,涉及到的开发工具有:(1)模型及控制算法搭建的Matlab-Simulink;(2)Matlab代码的自动生成Code Generator;(3)PLC代码的封装,即ODK1500s & Target 1500s;(4)PLC代码的高级语言设计,如Visual Studio、Eclipse;(5)PLC项目的设计,如TIA Portal。
6 主控程序框架
基于TIA Portal开发的风电库,可满足80%以上的风机设备控制要求。基于西门子提供的包含源代码的风能库,调用标准化的程序接口和变量管理,可以大大降低开发难度和工作量。OEM客户可以在此基础上根据特殊需求增加FB功能块,结合WindLib,以满足风机的全部控制要求。主控程序中集成文件操作、归档数据读取和故障录波等风机控制系统的专用功能,同时集成常见的电力系统通信规约,如IEC61400、IEC61850、OPC、Modbus、Profibus以 及 Profinet 232/485等,集成了基本的HMI操作界面。
7 控制算法
西门子提供的控制算法是基于ECN的控制策略,有别于传统的控制算法。ECN控制算法除了关注转速转矩控制外,不仅输出一种最大功率的结果,而是可以配置为降低风机的疲劳载荷、降低风机塔筒及主要部件的运行风险和降低停机时间等多个角度、多目标的控制算法。通过对算法参数调教,可以完成不同重点的控制指标。相比其他控制算法,ECN控制算法在以下环节具有突出特点。
7.1 Gain Scheduling
针对变桨系统的非线性特性,设计Gain Scheduling环节,根据叶片推力系数及桨叶角度的线性度,调节闭环过程中的PI控制参数,从而增加在不同风速情况下的响应速度,避免超速和转速波动等情况。通过计算的比值进行线性度调节。
7.2 Power Curve
转矩控制+功率限制是目前控制算法中比较常见的方法。转矩控制经历了最早的查表法,现在主流的是PI闭环控制。ECN算法在保留经典的控制方法之外,加入了“thrust”代表载荷的参数,在保持相对多发电量输出的基础上,限制载荷上限,降低风机运行疲劳,保证风机运行安全。本系统算法在充分对比不同运行曲线的情况下,选择thrust、torque+power limited曲线输出,主要特点是载荷尖峰被削平,发电功率较优。
7.3 LQR控制闭环
基于LQR(线性二次型调节器)原则搭建转速控制闭环计算控制参数,从而实现最优化控制。
针对3P/6P/9P干扰设计LTI(线性非时变)滤波器。有别于普通滤波器,LTI滤波器可针对变基准频率的变转速场合,适合应用于风机的主轴转速一直改变的控制。
8 软件在环与硬件在环
8.1 软件在环
软件在环设计的意义在于快速仿真测试控制算法,避免在现场真正运行时发生严重错误而影响系统安全。风机的软件在环需要搭建风机的模型和风机的运行算法,并在一个平台中进行连接测试。西门子控制系统的控制算法软件包不仅包含风机的运行算法,还包含风机的基本模型和风速模型,可在Simulink平台中进行仿真模拟。同时,基于西门子的控制器可以将控制算法利用自动代码生成的工具转换到西门子的控制器中执行,并连接控制算法到Simulink平台中的风机模型,从而实现软件在环的测试。
8.2 硬件在环
对比软件在环,硬件在环的意义在于连接真实的控制器和IO输入输出点,通过专业的风机仿真平台Bladed或者自己搭建的Simulink平台,进行实时通信或者以接线的方式连接控制器。在软件在环的基础上进一步延伸测试内容,可实现更准确、更可靠的控制算法。
通过软件在环和硬件在环测试后的控制系统软件和硬件,可以安装到风机上进行稳定运行,最终通过收集风机运行的数据,与在环测试结果进行对比,进一步优化仿真测试的准确性以及通过优化参数进一步改善风机实际运行效果。
猜你喜欢
选煤技术(2022年2期)2022-06-06
网络安全与数据管理(2022年3期)2022-05-23
模具制造(2021年7期)2021-09-14
数码世界(2020年11期)2020-11-23
物流技术与应用(2020年4期)2020-05-06
网络安全和信息化(2019年7期)2019-07-10
电子制作(2019年24期)2019-02-23
北京航空航天大学学报(2017年1期)2017-11-24
山东工业技术(2016年15期)2016-12-01
舰船科学技术(2015年8期)2015-02-27