
无人驾驶智能车导航定位系统设计研究
2019-10-15 12:43郭丽芳游雪辉苏志鑫邹家伟邹何
中国管理信息化 2019年18期
关键词:无人驾驶
郭丽芳 游雪辉 苏志鑫 邹家伟 邹何

[摘 要]为了保证无人驾驶汽车在道路中安全可靠运行,需要为无人驾驶车辆提供高精度的定位信息。目前,常用的定位方式单独使用在无人驾驶车辆上时,都会因为其局限性不能长期稳定地为无人驾驶车辆提供高精度的定位信息。本设计将多种定位方式相组合,利用不同定位方式的特点和优点,对不同定位方式因为环境变化或时间累积造成的误差进行修正,使定位系统能够长期稳定地为无人驾驶车辆提供高精度的定位信息,无人驾驶车辆在拥有高精度的位置信息时,可进行自动规划行驶路径,使车辆安全到达目的地。
[关键词]无人驾驶;高精度定位;组合定位
doi:10.3969/j.issn.1673 - 0194.2019.18.081
[中图分类号]U463.67[文献标识码]A[文章编号]1673-0194(2019)18-0-03
0 引 言
近年来,随着新能源和智能技术的发展,智能车已经成为现代汽车发展的趋势,越来越多的智能化技术应用到汽车系统中。智能车在智能交通系统中成为许多高新技术的载体,对于人们生产、生活相关的道路交通安全、汽车自主创新、煤炭工业瓦斯检测、物流运输、环境保护和军事应用等各个方面都具有重要意义。随着新能源智能车相关技术的研究和发展,智能车已在各领域得到一定程度地推广和使用,但是如何在确保安全的首要前提下,使智能车在复杂交通系统环境下更高效、智能运作,是未来整个城市智能交通系统的发展方向。在新能源无人驾驶智能车的关键技术中,无人驾驶技术是关键的技术之一,自动导航定位技术是无人驾驶的核心基础,是区分智能车和非智能车最重要的标准。
1 导航定位系统分析与设计
无人驾驶汽车在道路中行驶,最重要的是保证安全。车辆从起始位置行驶至目标位置的过程中,需要定位系统来实时获取车辆位置信息。目前,常用的定位方式包括卫星定位、惯导定位、视觉里程算法定位、UWB超带宽无线定位等。
1.1 常用定位系统在无人驾驶导航定位中的分析
1.1.1 卫星定位
全球卫星定位系统是一种使用运行在地表上空的卫星进行定位的系统,车辆能够通过全球卫星定位系统获取车辆当前的位置信息。目前,全球应用广泛的四大卫星定位系统主要包括美国的GPS、俄罗斯的GLONASS,欧盟的GALILEO和中国的BDS。卫星定位技术成熟,方式简单,能大致确定无人驾驶车辆的经纬度。但使用卫星定位时,卫星信号在传输过程中容易受到建筑物遮挡,使卫星信号弱或丢失,导致卫星定位位置产生较大偏差,因此,不能只使用卫星定位为无人驾驶车辆进行定位。
1.1.2 惯导定位
惯导定位系统包括平台式惯导系统和捷联式惯导系统。惯导定位通过陀螺仪和加速度计将运动物体的运动状态对时间进行积分,最终解算出物体的运动姿态、运动速度和所处位置等信息。惯导定位方式不依赖于卫星、基站等,建设成本低。惯导定位技术确定位置的方法基于积分,由于车辆在行进过程中的偏移和抖动,长时间的惯导定位会累积积分误差,随着车辆运行里程增加,捷联惯导定位方式累积误差增加,使无人驾驶车辆的定位信息产生偏差。
1.1.3 视觉里程算法定位
视觉里程算法定位方式使用了机器视觉,无人驾驶车辆使用摄像头获取道路中的图像,通过图像处理算法提取每一帧图像的特征值,通过各帧图像中同一物体所处矩阵位置的不同,不同帧图像进行不断迭代,累积求和形成视觉里程计,计算出无人驾驶车辆当前所处位置,从而对车辆进行定位。使用机器视觉能够获得颜色丰富的图像信息,有利于对车辆周围的环境信息进行检测。摄像头对光线敏感,强光、逆光和黑暗环境会极大地影响摄像头拍摄的图像曝光,高速运行的车辆也会使普通摄像头拍摄的图像变得模糊和扭曲。此外,车辆运动时会使机器视觉的视角发生变化,被拍摄的物体特征会发生改变,导致从图像中提取道路特征值的算法难度被提高。最恶劣的情况是,由于光线变化和摄像头视角发生变化,图像处理算法失效。因此,在无人驾驶车辆中,不能单独使用机器视觉里程算法对无人驾驶车辆进行定位。
1.1.4 超带宽无线定位
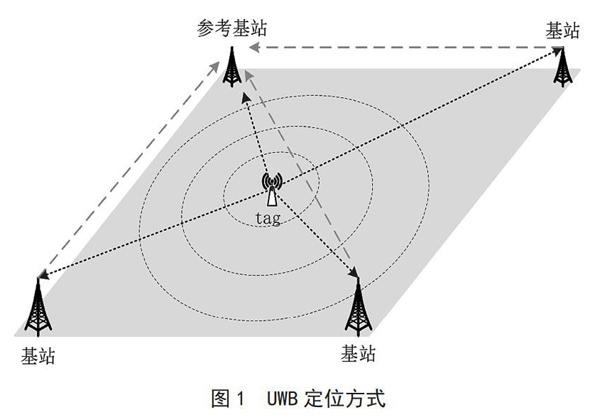
超宽带(Ultra Wideband,UWB)是一种使用了报文到达时间差的新型无线通信技术。用UWB方式进行定位,需要一个被定位的终端、一个参考基站以及至少3个普通基站。这个UWB终端称为UWB标签(tag),UWB定位方式示意图如图1所示。
使用UWB进行定位时,由于UWB标签与各个UWB基站之间的距离不同,UWB标签广播一次数据,但各个基站接收数据时间不同,此时,基站接收到的数据产生了时间差。各个基站将数据再发送给参考基站,参考基站获得UWB标签发送信号到达不同基站的时间,经过解算得到UWB到各个基站的时间差,当解算时间差数量大于或等于3个小时时,可利用公式(1)建立四元二次方程组,解算求得UWB标签的位置。
(1)
其中,(x,y,z)对应于UWB标签的位置;(xi,yi,zi)对应于UWB基站的位置信息;C为真空中的光速3×108m/s;ti表示参考点位置的到达时间;t0表示定位点发出信号的时间。当参考基站的个数越多,解方程得到相同解的个数越多,定位精度越高。
UWB定位方式的精度在厘米级,能够满足无人驾驶车辆对定位的需求。UWB定位方式高度依赖UWB基站,建設成本高昂,在无人驾驶车辆中不建议单独使用UWB定位方式进行定位。
1.2 无人驾驶导航定位方式设计
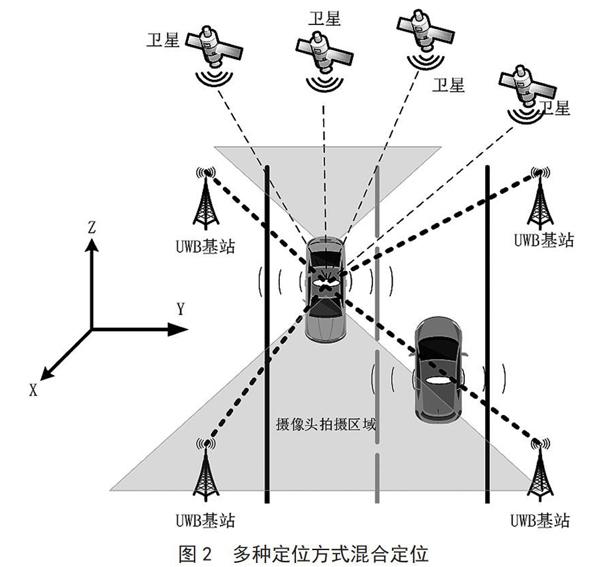
本文使用卫星定位、捷联惯导定位、机器视觉里程算法定位和UWB定位4种方式相结合的定位方式,能够使无人驾驶车辆在各种道路上实现高精度定位。各种定位方式相融合,能够对各种定位方式的不足之处进行互补。使用卫星定位确定车辆所处的位置范围后,通过捷联惯导定位方式能够缩小车辆位置信息范围,使用卫星定位对捷联惯导定位产生的误差进行修正。使用捷联导航定位的方式,既实现了定位功能,又能使用陀螺仪、加速度计和电子罗盘进行姿态解算,判定当前车辆的车速、运动姿态等,判定车辆运动方向是否与道路方向平行,车辆处于上坡或下坡状态、转向时的转向角度等信息。通过与机器视觉相结合,解算当前道路的路面车道线、标线、前后方车辆运动状况,应用人为驾驶车辆时左右后视镜的功能。在复杂的交通路口、桥梁下或者隧道中,卫星定位系统将会失效,如果隧道较长,惯导定位方式会出现误差,此时,可以通过UWB定位继续保持无人驾驶车辆的定位精度。在此种混合定位模式下,无人驾驶车辆能够实现持续高精度定位。混合定位示意图如图2所示。
2 智能车系统设计
为了实现无人驾驶车辆从起始位置自动行驶至目标位置,无人驾驶车辆要应用自动定位导航、路径规划、运动决策和控制功能,对系统进行模块化设计,主要包含主控模块、电源模块、定位系统模块、电机驱动模块和数据通信模块。小车硬件系统框图如图3所示。
2.1 选择主控芯片
主控芯片是无人驾驶车辆的核心部件,需要结合外围器件,如驱动LCD屏使用24位并行可变静态存储控制器总线(FSMC)、触摸屏使用集成电路总线协议(IIC)、定位系统模块使用通用异步收发传输器(UART)协议。因此,选择的芯片应具有FSMC总线接口、IIC接口、UART接口等片上外设,根据芯片处理速度、片上外设资源和性价比考虑,选用ST公司STM32F429作为主控芯片。
2.2 小车系统电源设计
为了小车能够稳定运行,需要为小车提供稳定的电源。小车设计中,电机驱动使用的电压为12 V,屏幕电源电压为5 V,单片机工作电压为3.3 V。因此,小车电池采用12 V電压输出的电池,使用LM 7805和LM 1117-3.3输出5 V和3.3 V的电压,以供给系统各个模块使用。LM 7805和LM 1117-3.3最大输出电流为1.5 A,最大输出功率分别为7.5 W和4.95 W,经过对小车系统功耗进行分析可以发现,两款电源芯片能够为小车提供足够的功率输出,并有一定的功率裕量。
2.3 定位系统设计
卫星定位方式使用GPS+北斗双定位模块ATGM332D获取车辆当前的位置信息,该模块的定位精度为2.5 m,首次定位时间为32 s。模块在上电后,会自动进行初始化,初始化完成后,ATGM332D通过UART将定位信息按照NEMA0183协议标准格式发送给车载电脑,车载电脑按照相对应的格式解算数据,解算完成后车载电脑获得车辆的定位信息。
机器视觉通过摄像头采集图像信息,采集的图像信息应尽量清晰,以提高物体特征辨识度,减小因图像采集原因引起的误差。本次设计采用了一款CMOS传感器制作的摄像头OV5640,最大能够输出500 W像素的图像(2 592×1 944分辨率),支持RGB565、YCbCr422、JPEG等多种格式的图像输出。此外,OV5640还可以对白平衡、对比度、饱和度以及色度等进行自动补偿,提高采集到的图像信号的准确度。
2.4 电机驱动模块设计
单片机能够控制输出PWM控制电机的转动速度,PWM的占空比越大,电机转动速度越快。因为单片机I/O口输出电压为3.3 V,最大输出电流为15 mA,得到最大输出功率约
50 mW,不能直接驱动大功率的电机进行工作,需要通过驱动电路调整。经过驱动电路后,输出的PWM信号与输入的PWM信号频率、占空比一致,带负载能力大大增加。
2.5 系统原理图
对系统各部分进行模块化设计,分别为电源接口及开关模块、电源电路模块、MPU9250接口模块、UWB接口模块、LED指示灯模块、电机接口模块、摄像头接口模块、LED屏幕接口模块、电机驱动模块和STM32F429核心板模块,上述模块构成系统整体的原理图。
3 样机及性能测试
设计完成车辆原理图后,可以对车辆进行焊接和调试。系统设计中,主控使用带有驱动RGB888屏幕接口的STM32F429的最小系统板。准备一块万用板,将小车所使用的电源芯片、mpu9250模块、电机驱动模块、GPS定位模块、摄像头接口等焊接至万用板上,将摄像头通过支架立起适当高度,选择适当的视角,通过FC软排线连接至摄像头接口,将屏幕连接至最小系统板屏幕接口,使用杜邦线将UWB定位模块和卫星定位模块ATGM332D连接至单片机的串口引脚进行整机调试。使用集成开发环境keil对单片机进行编程,编写各个功能模块的驱动程序。各个模块的数据采集无误后,对各个模块的数据进行算法融合,使小车能够持续稳定地获得高精度的定位信息,进行自动路径规划。
4 结 语
无人驾驶车辆实现自动定位导航的关键意义在于使无人驾驶车辆持续获得高精度的定位信息。多种定位方式组合定位能够使无人驾驶车辆在不同的环境中持续获得高精度定位,但此种方式也使车辆整体成本增加。因此,相关企业应在保证车辆安全可靠行使的前提下,寻求高精度定位方式和成本之间的平衡点。提高定位系统精度需要不同学科领域融合研究,在组合定位系统中产生的不同数据进行融合时,需要更优的算法,使无人驾驶车辆获得更高的精度。智能交通和智慧城市中实现全路况无人驾驶,人们的生活将变得更加便利。
主要参考文献
[1]王一强,孙罡,侯祥博.UWB超带宽技术研究及应用[J].通信技术,2009(3).
[2]张新跃,沈树群.UWB超带宽无线通信技术及其发展前景[J].数据通信,2004(2).
[3]汪明磊.智能车辆自主导航中避障路径规划与跟踪控制研究[D].合肥:合肥工业大学,2013.
[4]王钦普,赵佳,赵浩.无人驾驶汽车发展面临的挑战与建议[J].客车技术与研究,2016(6).
[5]谭宝成,曹国浩.4G网络在无人驾驶智能车远程监控系统上的应用[J].电子设计工程,2015(15).
[6]李忠东.戴姆勒:稳步推进无人驾驶与共享出行[J].汽车与配件,2018(35).
[7]陈文华.汽车无人驾驶技术的发展现状与研究趋势[J].科技创新导报,2019(11).
[8]章江.戴姆勒稳步推进无人驾驶与共享出行[J].轻型汽车技术,2019(1).
[9]杨忠阳.“无人驾驶”汽车何时上路[J].智慧中国,2019(4).
[10]赵广立,李惠钰.无人驾驶技术的那些事儿[J].商业观察,2019(Z1).
[11]袁孝斌.无人驾驶智能车障碍检测方法探讨[J].企业导报,2016(9).
[12]王凡.智能车辆中基于GPS和陀螺仪的导航与定位[D].北京:北京工业大学,2013.
[13]刘霞,龙飞,张延升.雷达机动目标跟踪无源定位优化研究[J].计算机仿真,2016(3).
猜你喜欢
控制与信息技术(2022年5期)2022-11-19
作文小学中年级(2022年9期)2022-09-08
中国特种设备安全(2021年11期)2021-05-05
科学(2020年3期)2020-11-26
小哥白尼(军事科学)(2020年8期)2020-05-22
专用汽车(2018年10期)2018-11-02
空中之家(2017年11期)2017-11-28
汉语世界(2017年5期)2017-09-21
科学大众(中学)(2017年3期)2017-07-06
百科探秘·航空航天(2016年12期)2017-01-15
