数字式励磁系统接线故障判断及处理方法
2019-10-09 07:48
防爆电机 2019年5期
(中船重工电机科技股份有限公司,山西太原 030027)
0 引言
随着发电机单台容量的增加,电压等级的升高,对发电机的控制部分尤其是励磁系统的要求也越来越高,数字式励磁调节器(目前大多选用Basler和ABB公司的产品)和相应的励磁器件合称为数字式励磁系统,以其具有的多种可选择的控制模式及相互间的无扰动切换(AVR、FCR、VAR、PF四种模式)、调节快速、灵活、准确,可通过通信总线串行接口(RS232、RS485、以太网)实现计算机和励磁调节器的通讯、在线更改设定程序、实时监测运行参数等多种优势赢得了市场和用户的认可,试验结果也表明,其性能指标完全满足产品规范及各大船级社的要求,是当下发电机励磁系统的首选。所以掌握其操作方法、常见故障判断及处理方法也是势在必行,根据多年调试及应用经验,总结了最典型、也是最易发生的电压互感器PT相序、电流互感器CT极性接线错误问题,通过理论和相位分析,得出对应工况的数值,方便操作者准确判断故障接线所在,及时处理,避免问题的进一步扩大。
1 典型接线错误故障判断及处理方法
现以一功率1500kW、电压6300V发电机为例,定义标准负载为:有功功率205kW(无功功率157kvar)、电流24A、功率因数0.8(滞后,相位角36.9°);测量输入接线定义为:电压互感器PT二次侧U、V、W对应数字式励磁调节器(以下简称AVR)电压测量输入的A、B、C,电流互感器CT二次侧S1、S2对应AVR电流测量输入的I+、I-(根据AVR配置要求,电流互感器CT必须在发电机V相,功率因数角为B相电压与电流的夹角);定义发电机及AVR测量正序为ABC,逆序为ACB。AVR的电参数测量界面见图1,发电机运行过程中,可实时监测发电机在各个状态下的电压、有功功率、无功功率、功率因数等数据。

图1 AVR电参数测量界面
1.1 工况一:发电机出线正序,发电机带前述定义的标准负载运行,AVR测量界面见图2,主要电参数计算过程见式(1)、式(2)、式(3)。
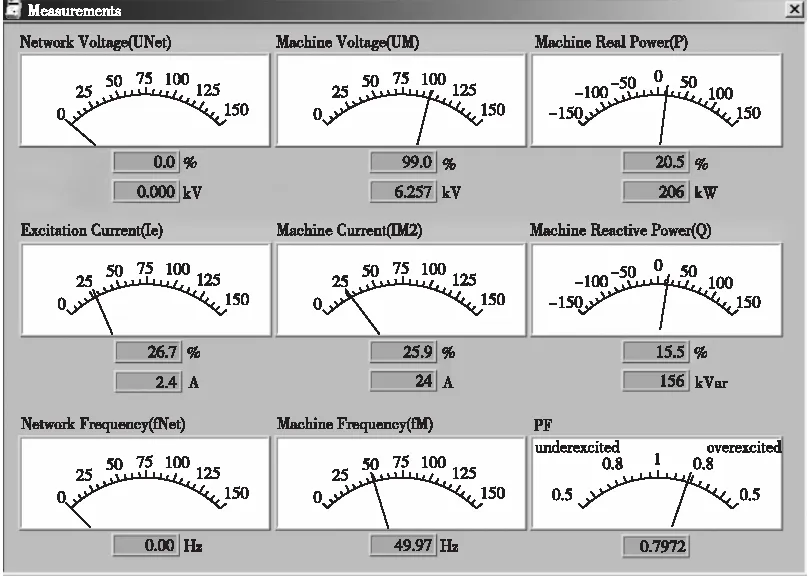
图2 AVR测量界面
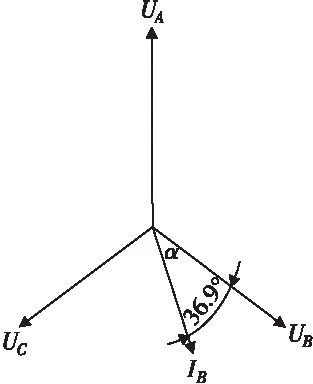
图3 AVR测量界面
功率因数
PF=cos36.9°=0.7997
(1)
有功功率

(2)
无功功率

(3)
通过计算得出,AVR测量界面下各个电参数测量值与理论计算值、标准负载一致,励磁器件与AVR测量接线准确,AVR测量向量图见图3。
2.2 工况二:发电机出线正序,发电机带前述定义的标准负载运行,AVR测量界面见图4,主要电参数计算过程见式(4)、式(5)、式(6)。
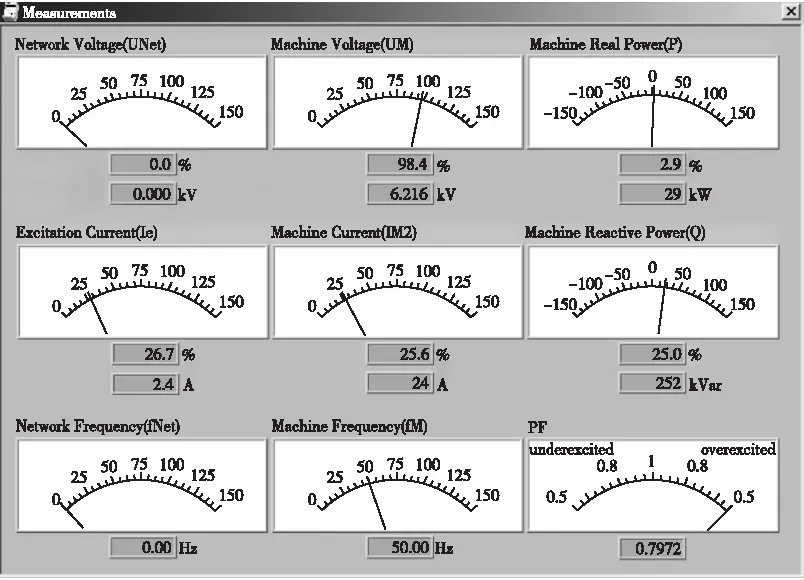
图4 AVR测量界面
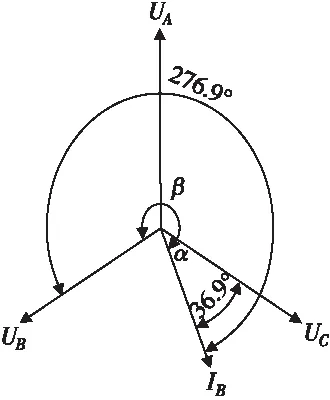
图5 AVR测量向量图
因为所有工况下发电机的励磁器件安装位置没有变化,即IB位置不变(图中α角仍为36.9°),所以此时只能是B、C相倒了相序,即UB和IB的夹角β(为276.9°,但发电机运行时,真正的相位角只能是-90°~+90°之间,而此工况下产生的角度只有在接错线的情况下才会出现,实际上这种角度是永远不会存在的,下文如有跟这种情况类似,不再重复说明)即为AVR实测的电压和电流的相位角。
功率因数
PF=cos276.9°=0.1201
(4)
有功功率


(5)
无功功率

(6)
注:当AVR电压测量为负相序时,对有功功率无影响,对无功功率数值的正负有影响,影响系数为-1。
通过计算得出,AVR测量界面下各个电参数测量值与理论计算值一致(因为测量精度问题,测量数值略有差异),但与标准负载差异大,原因为:电压互感器PT与AVR测量B、C相相序颠倒,导致AVR数据采集和计算出错,具体的AVR测量向量图见图5。
2.3 工况三:发电机出线正序,发电机带前述定义的标准负载运行,AVR测量界面见图6,主要电参数计算过程见式(7)、式(8)、式(9)。

图6 AVR测量界面

图7 AVR测量向量图
该工况下测量值全为负值(根据AVR设置要求,在测量功率因数PF时有underexcited和overexcited两种状态,underexcited定义为欠励即PF值为负,overexcited定义为过励即PF值为正)。只能是电流互感器CT极性改变,B相电流位置由IB+变为IB-,UB和IB的夹角β(216.9°)即为AVR实测的电压和电流的相位角。
功率因数
PF=cos216.9°=-0.7997
(7)
有功功率
(8)
无功功率

=×6300×24×sin216.9°=-157kvar
(9)
通过计算得出,AVR测量界面下各个电参数测量值与理论计算值、标准负载数值一致,但AVR测量均为负值,故障原因为:电流互感器CT极性与AVR电流测量极性相反,导致AVR数据采集和计算出错,具体的AVR测量向量图见图7。
2.4 工况四:发电机出线正序,发电机带前述定义的标准负载运行,AVR测量界面见图8,主要电参数计算过程见式(10)、式(11)、式(12)。

图8 AVR测量界面

图9 AVR测量向量图
该工况为上述2.3和2.4同时接错的问题
功率因数
PF=cos96.9°=-0.1201
(10)
有功功率

(11)
无功功率

(12)
通过计算得出,AVR测量界面下各个电参数测量值与理论计算值一致,但AVR测量均为负值且数值差异大,数值差异大的原因为:电压互感器PT与AVR测量B、C相相序颠倒,负值故障原因为:电流互感器CT极性与AVR电流测量极性相反,导致AVR数据采集和计算出错,具体的AVR测量向量图见图9。
2.5 工况五:发电机出线逆序,发电机带前述定义的标准负载运行,AVR测量界面见图10,主要电参数计算过程见式(13)、式(14)、式(15)。

图10 AVR测量界面

图11 AVR测量向量图功率因数
PF=cos157.1°=-0.9122
(13)
有功功率
(14)
无功功率


(15)
通过计算得出,AVR测量界面下各个电参数测量值与理论计算值一致,但与标准负载差异大,数值差异大的原因为:发电机逆序、电压互感器PT与AVR测量B、C相相序颠倒,导致AVR数据采集和计算出错,具体的AVR测量向量图见图13。
2.7 各工况数据总结见表1
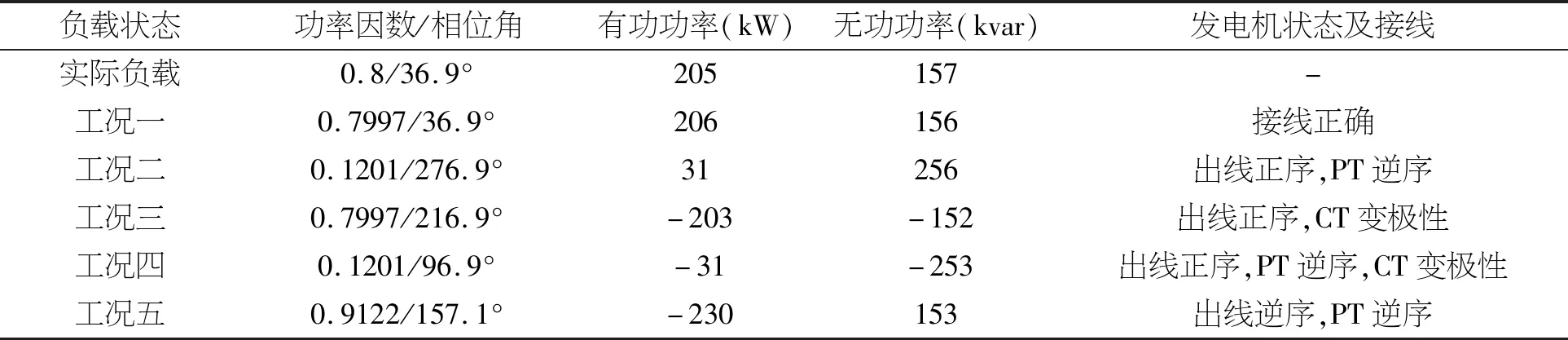
表1 各项工况数据总结
从表中可以总结得出以下结论
(1)但凡有功功率、无功功率中的任一为负值、功率因数为欠励时励磁器件与AVR测量输入间肯定存在接线错误;且无功功率为负值时,肯定是功率因数超前及欠励;
(2)改变电压互感器PT的相序对有功功率的正负无影响,对无功功率的正负有影响且影响系数为-1;
(3)电流互感器CT的极性(或极性改变后造成相位角的改变)决定有功功率的正负;
(4)因励磁器件接线错误引起的AVR测量错误都可以通过确实相位角的方法来确定。
3 解决措施及实施效果
3.1 解决措施
针对接线问题引发的数字式励磁故障现象,建议按下述方法排查和解决
(1)发电机组动车前,按照接线图仔细检查各励磁器件和AVR的接线是否准确;
(2)动车后连接通讯软件,在空载状态下检查各电气参数是否与控制柜显示的参数一致;
(3)机组轻载运行,查看电压、电流、有功功率、无功功率、功率因数等主要电参数是否与 控制柜显示的参数一致;尤其是AVR测量界面下各功率值出现负值、功率因数欠励时,肯定有接线错误,需停机检查;可借助相序仪测量AVR进线的电压相序;
(4)对于并机或并网的多台发电机组,可通过施加同样负载的方法对比每台的测量数据,找出故障产品逐一排除;
(5)对出现的故障现象多总结,多分析。
数字式励磁系统造价高周期长,且大都采用国外进口部件,因接线错误引发的问题轻者发电机不能正常运行,重者烧毁励磁器件和AVR,给用户带来极大的经济损失,所以找出最佳的解决措施,方便操作者准确判断故障接线所在,及时处理,避免问题的进一步扩大。
3.2 实施效果
数字式励磁系统因接线错误引起的故障现象最为常见,针对具体的故障现象,借助本文列举的理论计算、测量界面和实际负载相比较、画具体的AVR测量向量图方法及时、准确定位励磁器件与AVR间错误接线的所在,及时更换和调整错误的接线端子,排除故障。
猜你喜欢
大电机技术(2022年3期)2022-08-06
河北电力技术(2021年2期)2021-07-29
测控技术(2018年9期)2018-11-25
电子制作(2018年1期)2018-04-04
电子制作(2017年24期)2017-02-02
电子制作(2016年1期)2016-11-07
通信电源技术(2016年6期)2016-04-20
电测与仪表(2016年23期)2016-04-12
电测与仪表(2016年11期)2016-04-11
电测与仪表(2016年6期)2016-04-11