
一种数字式飞机高压直流发电机的电压调节器设计
2019-10-09 05:25卢建华郝凯敏赵学远
自动化与仪表 2019年9期
卢建华,郝凯敏,赵学远,孙 跃,张 波
(1.海军航空大学 航空基础学院,烟台264001;2.南京傅里叶电子技术有限公司,南京211100;3.海军91918部队,北京102300)
电能具有易于产生、传输、易于实现智能化分配的特点,为提高飞机整体性能,降低飞机寿命周期费用,人们提出多电飞机的概念,也就是利用电能部分取代液压能、气压能[1]。 目前世界上服役的先进飞机如F-35、空客A380、波音B787 等都是多电飞机,其大都采用高压直流电源系统给全机的机载设备供电[2]。 图1 所示为多电飞机高压直流发电系统结构框图。 从图1 可以看到,电压调节器控制着高压直流无刷发电机的激磁电流,直接关系着直流发电机的发电品质,影响着整个飞机的电气系统。
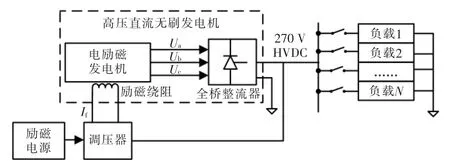
图1 高压直流发电系统结构图Fig.1 Structure of a high-voltage DC power generation system
在传统飞机上, 电压调节器常采用炭片式、晶体管式或者放大器式的电压调节器,其存在着体积重量大、调压误差大、反应慢等缺点,并且传统调压器的控制器多采用模拟电路实现,在某型飞机电压调节器的设计[3]以及实现过程中发现,基于模拟电路的调压器的调试过程费时费力。 而且在传统飞机上当飞机出现空中停车需要重新启动发电机时,需要飞行人员手动按压复位按钮,才能使得发电机保护电路和负载接入系统,这在一定程度上增加了飞机空中启动的风险。 随着微处理器及计算机技术的发展,集成化、智能化、数字化的电压调节器成为飞机电压调节器的必然选择[4]。
1 数字式电压调节器总体方案设计
基于DSP 的数字式电压调节器总体方案框图如图2 所示,其由CPU 控制单元、信号采集电路、电平放大电路组成。

图2 数字式电压调节器总体结构框图Fig.2 Block diagram of the overall structure of the digital voltage regulator
数字式电压调节器的原理为当飞机发电机输出电压Uo高于(低于)额定值时,芯片TMS320F2812(以下简称F2812)采集发电机输出电压信号,经过F2812 的内部PID 算法,输出占空比σ 低于(高于)50%的PWM 波, 然后经过电平转换电路将其电压放大驱动励磁电路的开关管,由于激磁电流If与PWM 波的占空比σ 成正比, 因此可以在激磁绕组中产生低于(高于)额定电流的激磁电流If,从而使得发电机的输出电压升高(降低),最终使发电机输出电压达到稳定。
值得指出的是,为了保护飞机发电机,防止激磁电流过大引起发电系统瘫痪[5],设计激磁电流的信号采集电路,对激磁电流进行实时监控,当激磁电流超出极限值时, 电压调节器输出低电平信号,不再驱动励磁。 与此同时, 通过F2812 内部的SCI串行通信模块输出故障信号给上位机,方便地勤人员维护。 为了实现发电机在启动后负载和保护电路能够自动接入, 设计发电机转速信号的采集电路,当发电机转速达到稳定时,启动保护程序并通过程序控制使得负载自动接入电网。
2 硬件设计
数字式电压调节器硬件核心采用TI 公司推出的32 位定点DSP 芯片TMS320F2812,F2812 芯片内部集成了事件管理器EV 模块,12 位的ADC 采样模块,串行通信模块SCI 等模块[6]。 为了实现发电机的调压和保护功能,需要设计CPU 最小系统、电压信号采集电路、电平转换电路及电源电路。
2.1 CPU 单元
CPU 是实现数字式电压调节器设计功能的核心。 根据所设计的总体方案,CPU 单元应该具有采样通道、PWM 波输出通道以及通信通道。 图3 所示为F2812 最小系统。 最小系统主要由F2812 芯片、30 MHz 晶振和电容、电感器件组成。其中ADCINA0为发电机输出电压Uo的采样通道,ADCINA1 为发电机转速信号Un的采样通道,ADCINA7 为激磁电流If的采样通道,T1PWM 为PWM 波输出通道,SCTXDB 为SCI 串行通信通道。

图3 F2812 最小系统Fig.3 F2812 minimum system
2.2 信号采集电路
为了满足F2812 对于输入信号的采样要求,必须对输入到F2812 的电压信号进行处理。 同时为了设备安全,需要将强电与弱电隔离,因此采用具有良好稳定性和线性度的HCNR201 光电耦合器完成隔离设计[7]。 所设计的电压信号采集电路如图4所示。
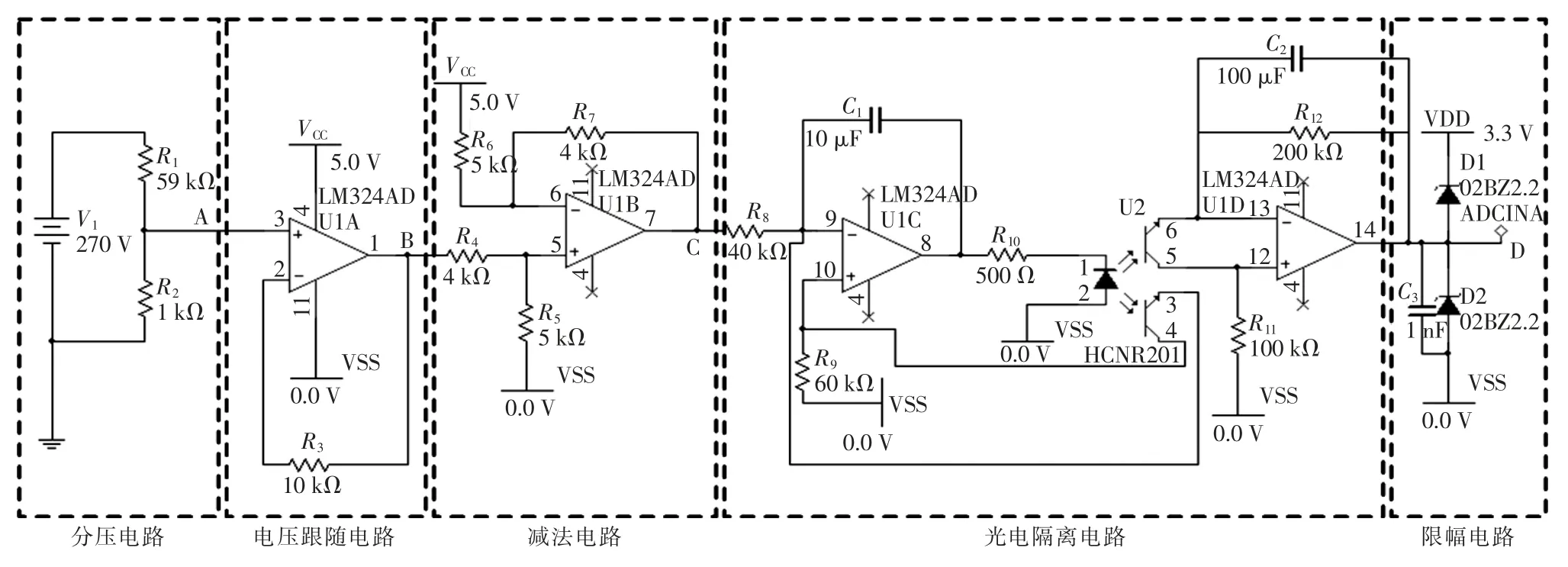
图4 电压信号采集电路Fig.4 Voltage signal acquisition circuit
增大电压采样增益有利于提高采样精度,降低调压器稳态误差,因此在设计发电机输出电压的采样电路时采用多级处理。 图4 中电压信号采集电路由分压电路、电压跟随电路、减法电路、光耦隔离电路以及限幅电路组成。 在电压信号采集电路中,有:

根据光耦器件HCNR201 传输特性,有:

式中:传输增益K 为1±5%。
联列式(1)~式(4),并将电阻参数带入公式,得到:

由式(5)可以看出,采样电压与发电机输出电压成线性关系。
由于F2812 对于输入电压有着严格的要求,一旦输入电压大于3.3 V,便会烧坏芯片,因此,为了防止采样电压过大烧毁芯片,在采样输入端加入限幅电路。当D 点电压略大于3.3 V 时,二极管D1导通,当D 点电压略低于0 V 时,二极管D2导通。这样就使得输入到F2812 采样通道电压始终保持在其允许的范围内。
所设计的激磁电流信号采集电路、转速信号采集电路与发电机输出电压信号采集电路类似,由电压跟随电路、光耦隔离电路以及限幅电路组成。 不难得出,通过电压型电流传感器输入到F2812 的激磁电流的电压信号Uf与If成正比,转速电压信号Un与转速n 成正比。
2.3 电平转换电路
F2812 输出PWM 波形的高电平为3.3 V, 而励磁电路开关管却需要5 V 以上的电压驱动。 因此需要将F2812 输出的PWM 进行电平转换。 电平转换模块采用74HC245,该芯片具有功耗小、工作温度范围大的特点, 其输出频率更是能够高达80 MHz,完全能够满足本设计需求。 设计的功率放大电路如图5 所示。F2812 的102 引脚T1PWM 输出3.3 V 占空比可变的PWM 波,经过74HC245 芯片电平转换,从B0 引脚输出高电平为5 V,占空比与T1PWM 引脚输出相等的PWM 波,从而驱动后级激磁电路。 其中第1 引脚(DIR)为方向控制引脚,当输入高电平时,表示A 组引脚为输入,B 组引脚为输出。

图5 PWM 电平转换电路Fig.5 PWM voltage transformer circuit
2.4 电源电路
电压调节器的电源电路由两部分组成。 第一部分为CPU 供电电路,第二部分为外围电路的5 V 供电电路。
F2812 的内核电压要求1.8 V,Flash 要求3.3 V电压,而且F2812 对于电源电压很敏感,因此选择电压精度较高的TPS767D318 电压转换芯片。 由于在设计中芯片供电统一采用5 V 供电,而在多电飞机上, 与5 V 电压值最为接近的电源为28 V 直流电,为了得到直流5 V,采用LM7805 模块实现变压。
3 系统软件设计
系统软件采用TI 公司发布的CCS7.2 软件编程,为了使得系统有良好的动静态特性,控制规律采用工业上常采用的PID 算法。
3.1 控制规律参数的确定
为了满足稳定时间不大于0.3 s,稳态误差不超过2 V 的指标要求, 针对某型飞机的高压直流发电系统[8]进行仿真。
在MATLAB 中采用试凑法调整PID 参数,并对其仿真, 最终得到当Kp=10.3,Ki=0.17,Kd=0.11 时,系统输出阶跃响应曲线达到最优。 其响应曲线如图6 所示。
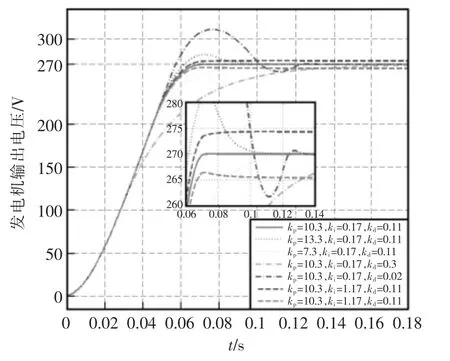
图6 发电系统阶跃响应曲线Fig.6 Step response curve of power generation system
由图6 可以看出,在最优响应曲线下,系统峰值电压为270 V,稳定时间为0.08 s,符合设计预期。
3.2 程序设计
电压调节器的实现调压以及保护的逻辑判断都是通过软件控制F2812 的寄存器来实现的。 根据设计的总体方案,设计程序流程如图7 所示。
软件设计的为了使得系统在发电机完成启动之后能够产生占空比σ 与发电机输出电压误差值ΔUo成负相关的PWM 波。 并实时监控发电机激磁电流状态, 当ADCINA7 收到超出设定范围的信号时,DSP 向上位机发出故障信号, 并封锁输出PWM波。 当DSP 内部程序根据ADCINA7 接口信号判定发动机处于启动阶段时,断开保护程序,保证发电机正常启动。
通常激磁电路的开关管频率为2 kHz。 在采样数据的处理过程中, 充分利用DSP 高速运算的特点,在每个周期内采集10 次数据,并去除最大值以及最小值求取平均值[9],最后利用PID 算法求得占空比。
4 实验与验证
由于硬件实验平台受限,只对数字式调压器的采样及PWM 输出部分进行实物实验验证, 示波器波形如图8 所示。 对调压系统进行仿真验证。 将数字式电压调节器和文献[3]中的脉冲调频式电压调节器激磁电流响应作对比, 其响应曲线如图9 所示。 可以看出数字式电压调节器响应速度更快,激磁电流值更为安全可靠。
5 结语
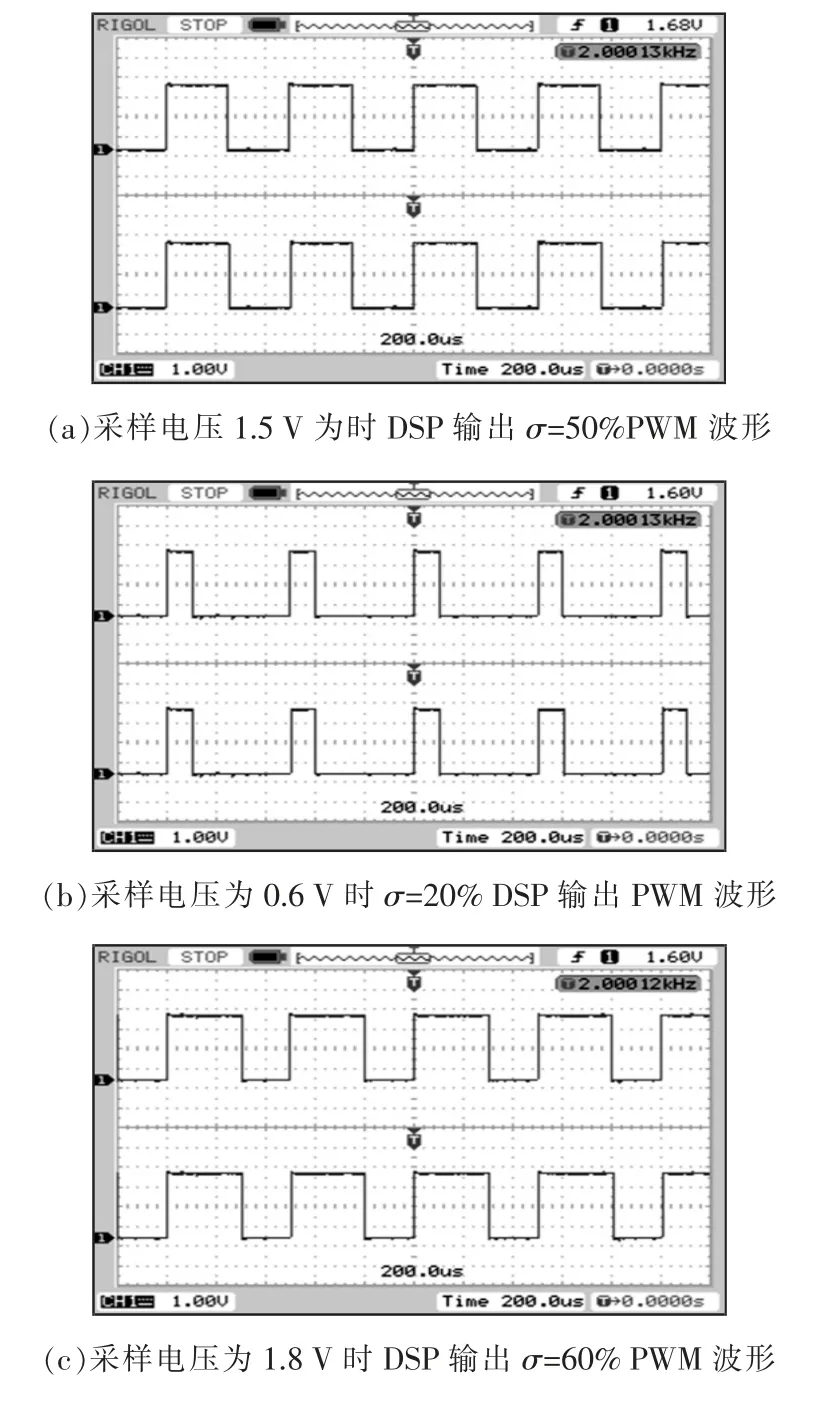
图8 示波器波形Fig.8 Oscilloscope waveforms
本文所设计的数字式电压调节器具有以下特点:①集成了飞机发电机的电压调节和保护电路,并能在发电机正常建压之后自动接入负载电路和保护电路,这样有利于在空中停车特情发生后快速重启发电机,降低空中停车重启风险;②电压调节器的动态响应得到优化,响应速度更快,激磁电流得到限制,有利于发电机的安全稳定;③数字式电压调节器的具有开发周期短,集成度高,易于实现的优点。

图9 DSP 实验波形及MATLAB 仿真波形Fig.9 DSP experiment and MATLAB simulation experiment
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
故事作文·高年级(2021年12期)2021-12-21
中学生数理化·中考版(2019年10期)2019-11-25
电子制作(2019年7期)2019-04-25
电子制作(2019年24期)2019-02-23
电子制作(2018年17期)2018-09-28
宇航计测技术(2018年3期)2018-09-08
军事文摘·科学少年(2016年8期)2016-11-02
军事文摘(2016年16期)2016-09-13
汽车与新动力(2015年1期)2015-02-27
