
基于移动三维激光扫描仪的地铁限界测量分析
2019-10-08 09:03刘云峰董燕柳志云
软件 2019年2期
刘云峰 董燕 柳志云
摘 要: 传统架站式三维激光扫描技术在地铁限界测量中,存在采集数据繁琐,点云处理难度高等问题,同时现有的限界分析软件测量节点稀少。本文针对以上问题,利用移动式三维激光扫描仪,对昆明地铁某段隧道进行了相对测量。点云数据通过处理,导入专业的限界测量分析软件,完成净空差值测量,测量结果显示,测量区间未有任何超限病害,并快速生成图文一体检测报告,验证了本文提出的地铁限界测量技术,能够提供高效、准确、便利的服务。
关键词: 移动三维激光,点云处理,地铁轨道交通,限界测量分析
【Abstract】: In the metro limit measurement, the traditional station-based 3D laser scanning technology has the problems of cumbersome data collection and high difficulty in point cloud processing. At the same time, the existing gauge analysis software has few measurement nodes. In this paper, based on the above problems, a mobile 3D laser scanner was used to measure the underground tunnel of Kunming subway in relative mode. The point cloud data is pre-processed and imported into the professional gauge measurement and analysis software to complete the measurement of the clearance value. The measurement results show that there is no over-limit disease in the measurement interval, and the graphic and text detection report is quickly generated, which verifies the subway gauge measurement technology proposed in this paper that provides efficient, accurate and convenient service.
【Key words】: Mobile 3D laser; Point cloud processing; Metro rail transit; Gauge measurement analysis
0 引言
隨着城市交通对地铁轨道交通的需求增加,其路线也随之增多,这无疑对地铁轨道交通的日常运维效率要求越来越高。而在众多日常检查项目中,地铁轨道限界是保证城市地铁运营安全的重要指标。
目前,国内地铁限界检测的方法根据测量方式可以归纳为,接触式测量、非接触式测量,根据检测平台可以分为便携式测量、机车牵引式测量[1]。接触式测量中,应用最广的是限界检测车。检测车通过支架上安装的限界检测模板,与侵入限界的建构筑物接触,引发警报,以达到检测目的,该方法检测设备沉重,操作繁琐,检测不精准,且每次使用之前需进行变形检测,以免产生测量误差。非接触式测量中,主要有全站仪测量,断面仪测量,电视摄像测量,地面三维激光测量等。这些检测方法中,全站仪测量和断面仪测量数据采样少,检测率低,工作效率慢,无法实现高效全面的检测[2];电视摄像测量是对获得的隧道断面图像进行矫正配准,从图像中提取隧道断面的轮廓,但所提取的轮廓需要进行细化及误差修正,处理过程容易丢失限界信息且产生人为误差[3];地面三维激光测量具有扫描精度高,速度快等优点[4],虽然能够实现全面的限界检测,但数据采集效率低,外业采集前需进行现场勘查,确定采集方案等,采集过程中无法避免人员遮挡,干扰点云多,数据处理过程中依赖辅助标靶[5],多站点云拼接存在误差传递,最终影响测量精度。
移动三维激光扫描技术区别于传统的架站式扫描技术,具有以下特点:一,外业工作快捷高效,无需提前确定采集方案及辅助设备;二,可进行连续测量,直接获取高精度高密度隧道横断面点云,获取的数据为线性的有规律的海量点集合;三,可避免人员、设备遮挡。
目前,基于三维激光扫描技术的限界测量分析软件已广泛应用,如徕卡的隧道形变监测系统、中海达HD 3LS SCENE软件。现阶段只能提取隧道衬砌横断面,因此测量分析只在隧道衬砌层面,且只能进行顶高、底高及左右横距四个点的限界测量[6],测量内容不全面。针对以上问题,本文基于移动三维激光扫描技术提出高效的地铁限界测量分析方案。
1 限界测量内容及作业流程
1.1 限界测量内容
地铁限界测量中,主要测量内容分为设备限界和建筑限界[7]。设备限界位于车辆限界外,是车辆限界外加未计及因素和安全间距的界限,测量对象为架设在隧道内部的机车运行辅助设备、电力通讯线,安全检测台等构筑物,在横断面中呈规则多样图形。建筑限界是位于设备限界外,并考虑了沿线设备安装后的界限,测量对象为没有设备覆盖的隧道衬砌壁,呈规则圆形或椭圆。
1.2 作业流程
本文利用安伯格GRP 5000移动检测系统,结合点云预处理软件和限界测量分析软件,建立了基于移动三维激光扫描技术的地铁限界测量作业流程。该作业流程分别在点云预处理、限界测量分析中,应用了Geomagic studio15.0和Ambeg Tunnel Rail2.0软件。具体作业流程如下。
2 点云数据采集
本文的外业数据采集,无需获取控制点和辅助标靶架设,只需在Ambeg Tunnel Rail2.0软件中创建工程文件,进行项目名称编辑、预构隧道轮廓、输入起测里程及终点里程等操作,并将工程文件载入检测系统。现场架设仪器时,需确保双轮处于右手侧,以里程增大为前进方向,避免里程测量发生错误。
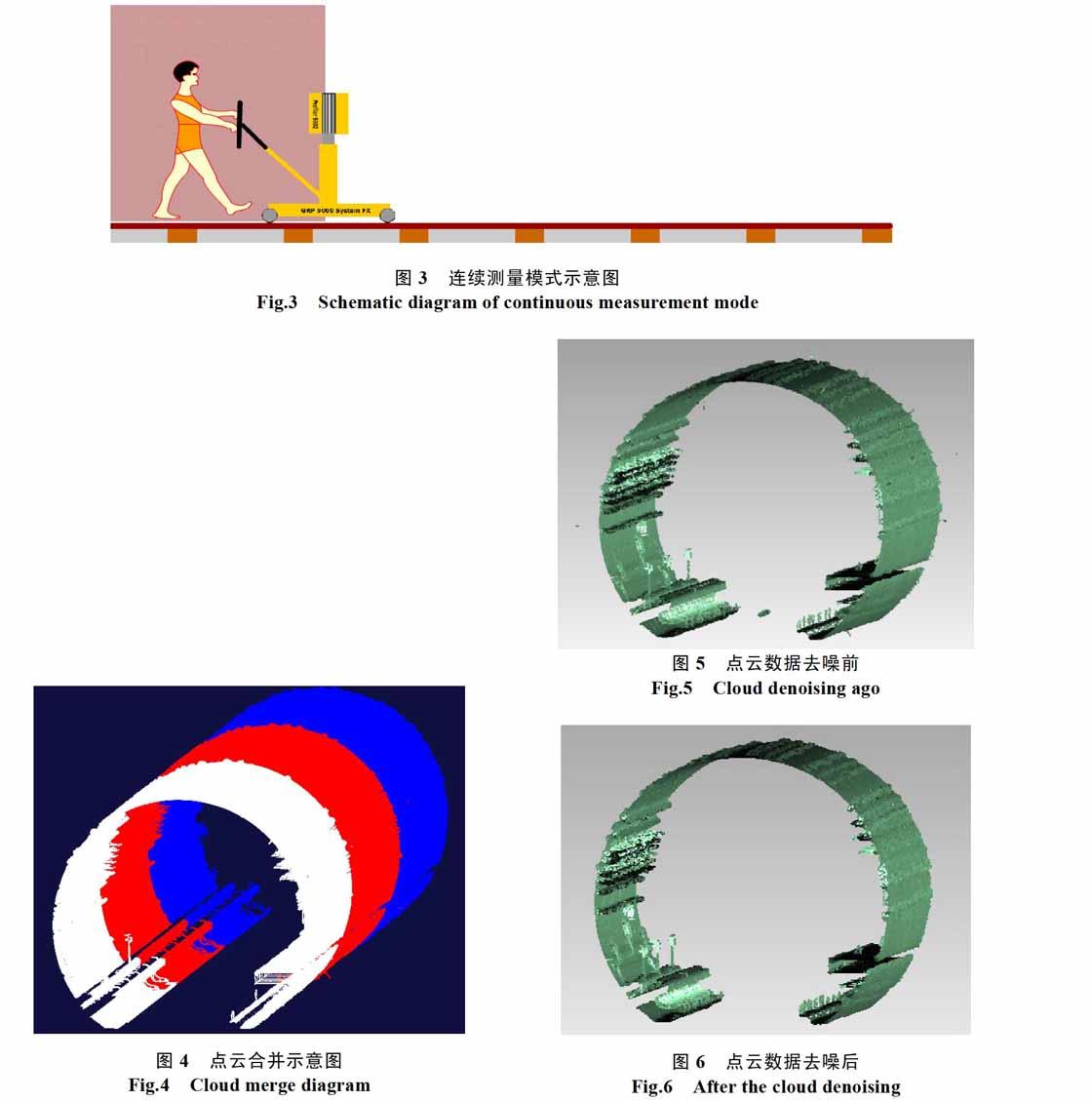
使用GRP 5000检测系统对昆明地铁某站区间进行相对测量,起测时对准起测里程标记,根据测量方式,选择连续测量工作模式,沿轨道做动态测量,速度控制为25 m/min,数据采集速度为5万点/秒,单点测量精度为±3 mm,满足限界测量的精度要求。检测系统主要组件如图1,2。
3 点云数据预处理
外业采集完毕后,将数据输出为ASC格式。连续测量工作模式决定了得到的点云数据是没有重合
的数据[8],同时,获取的点云数据无需进行坐标转换和全局拼接等操作,避免了数据在转换拼接过程中造成的误差。GRP 5000系统利用光电计数器获取测量小车的里程数据,里程分辨率为±5 mm,测量误差小于0.5%。虽然海量点云数据的管理算法已不断优化,但点云处理过程中,消耗时间和点云数量仍呈线性相关[9],因此,GRP系统在数据采集时,间隔5 m自动存储一个数据文件,在数据预处理过程中,可根据硬件设备的条件,直接使用Geomagic studio选择合适的文件数量进行合并。
3.1 点云去噪
利用该测量系统进行数据采集时可以避免人员设备遮挡,因此无需剔除干扰点云,省去补点操作[10-11]。本文使用Geomagic studio 15.0对点云进行粗差点、离群点的剔除,数据处理过程快速高效,剔除效果如图5,6所示。
3.2 数据压缩
由于仪器采集数据速度快,造成获得的数据中冗余的点云成分大,影响工作效率,需要对其进行
压缩,同时保留点云几何特征[12]。本文根据隧道点云的特点,使用Geomagic studio采用统一采样法对数据进行压缩,该方法可减少平坦区域内的点数,但保留高曲率区域内的点以保留细节。采样间隔设置为5 mm,由于是隧道点云,因此优化方面曲率优先,同时选中保持边界选项。压缩前,样本为8365277个点,压缩后为2891805个点。
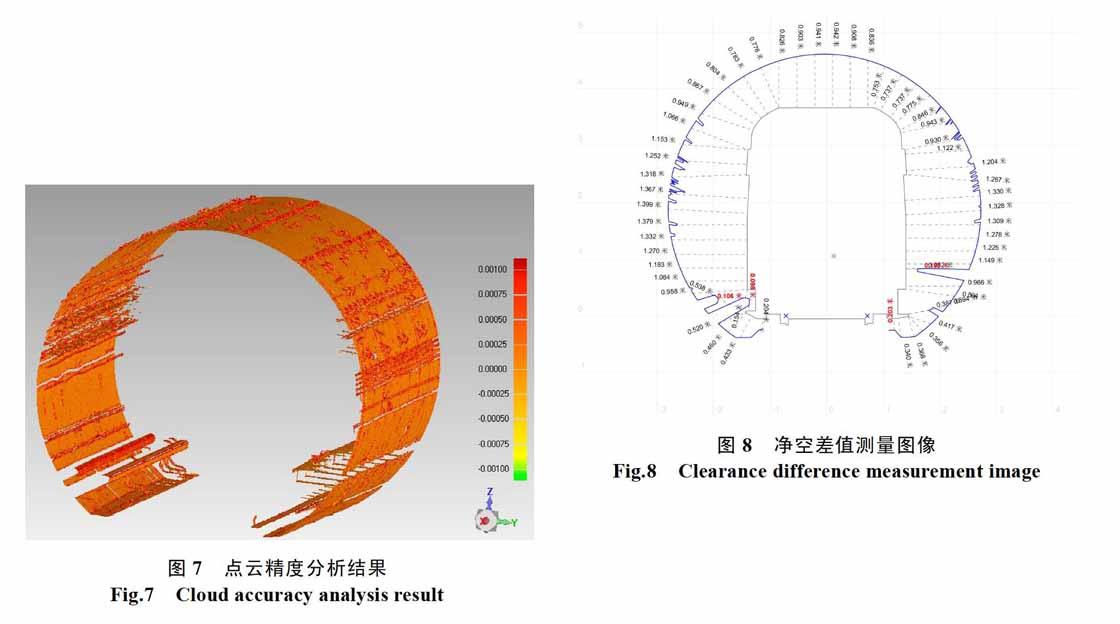
3.3 点云精度分析
点云去噪压缩的目的是剔除粗差,去除对后续应用分析无关的点云,使点云更加精简和准确,以保证曲线拟合的正确性和对数据信息进行精确的测量。因此,本文使用Geomagic studio对预处理后的点云采用主成分分析法[13],判断预处理后的点云整体精度。通过统计分析,结果显示点云间最大偏差距离为0.010 m,平均偏差0.0005 m,标准偏差0.00083 m,去噪精简后的点云整体精度在1毫米以内,对测量结果的影响可以忽略不计。
4 限界测量分析
在不同的测量应用中,对于隧道横断面的分析各有不同,变形监测、竣工测量等均以隧道衬砌横断面为测量分析对象,所需提取的横断面为简单的圆或椭圆,而限界测量的分析对象为设备限界和建筑限界,所需提取的横断面包括设备和建筑,图形结构复杂。本文使用的隧道限界分析软件能够完整提取所需横断面,并以机车限界为基础,自动测量横断面距机车限界节点最近的点间距。如图8所示。
4.1 横断面提取及叠加分析
预处理后的数据导入Ambeg Tunnel Rail2.0软件,可根据项目需求设定横断面提取密度,本文设置间隔5 m提取一个隧道横断面。
该测量系统采用独创的轨头智能识别技术。扫描仪原点距不同的轨道中心轴线对应有不同的常数定值,Tunnel Rail可根据该常数值及实测轨距自动计算隧道横断面的轨道基准点,机车限界与隧道横断面根据所得轨道基准点进行叠加。
导入DXF格式的机车限界文件,以轨道位置为基准,将机车限界和提取的设备限界与隧道限界进行叠加,以机车限界节点为检测对象,测量与之最近的点间距,相较于以往限界测量软件仅测量顶高、底高及左右横距,本文所使用的软件更符合限界分析需求。
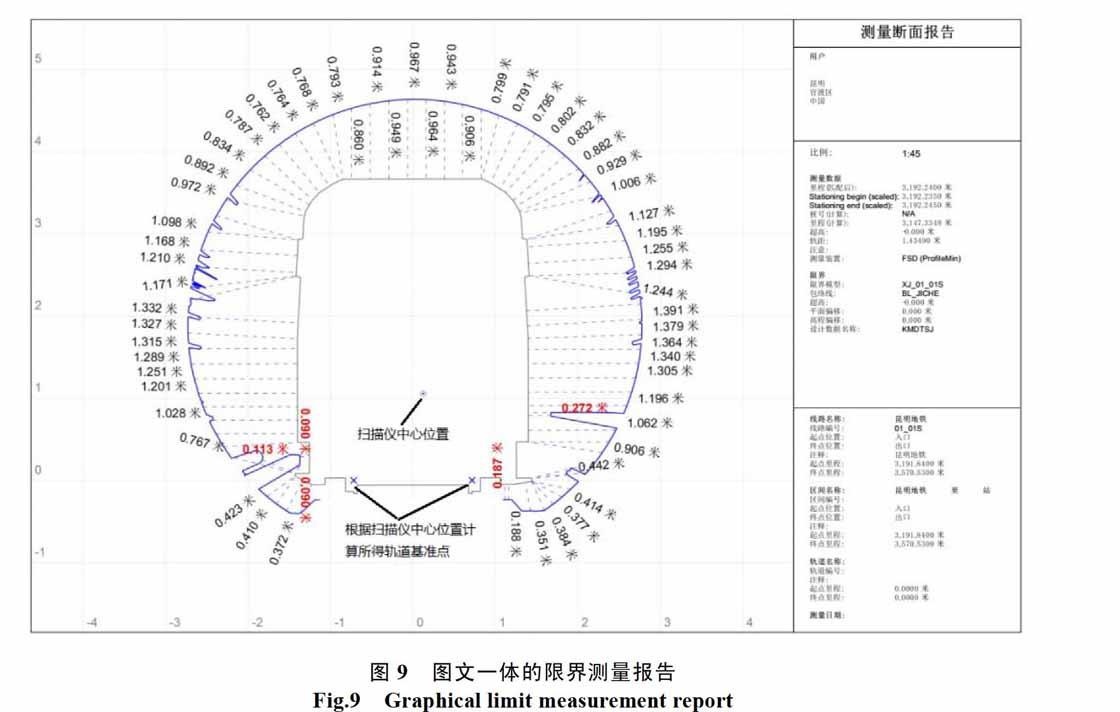
4.2 一键生成测量报告
限界测量分析完毕,软件支持一键生成图表检测报告。书面报告内容包括测量单位,测量里程,轨距,测量线路,测量区间,里程范围及其他测量信息。图像中显示,设备限界和建筑限界所有距机车限界关键节点最近的点间距,如图9所示。
5 结论
利用移动三维激光扫描仪对隧道断面进行连续测量,沿里程方向以25 m/min的速度自动采集存储断面,将点云数据预处理后,提取高精度断面图形。将机车限界导入软件中进行叠加分析,通过软件计算得到隧道限界的净空差值,通过对隧道前后三次复测,测区均未发现侵限现象。
本文提出的地铁限界测量技术已经用于实际地铁隧道限界检测项目,为隧道的安全检测,以及维护管理提供了高效可靠的检测和分析手段,区别于以往测量方案,本文提出的限界测量技术方案增加了设备限界测量,测量节点更多,测量内容丰富详实。总的来说,该技术方案利用移动三维激光扫描仪,结合免费的三维激光点云处理软件及专业的隧道限界分析软件,在提高作业效率的同时,更为直观的展现了限界测量情况,并快速生成图表一体的限界检测报告。在本文的数据处理基础上,还可以进行后续的隧道病害检测,隧道变形分析等。
参考文献
谢文军. 限界检测车在城市轨道工程中的应用[J]. 城市勘测, 2013(04): 145-148.
许少辉. 地面三维激光扫描技术在地铁隧道竣工测量中的应用[J]. 城市勘测, 2016(05): 68-72.
倪子舒. 铁路隧道限界检测中断面图像处理技术研究[D].北京交通大学, 2017.
刁建忠. 基于激光扫描与视频融合的交通流检测技术[J].软件, 2012, 33(8): 96-99.
劉全海, 谢友鹏, 赵尘衍. 三维激光扫描技术在地铁隧道断面测量中的应用[J]. 北京测绘2017(S1): 139-142.
王敏, 冯晶, 谢志海. 利用三维激光扫描仪进行地铁隧道限界测量[J]. 测绘通报, 2014(12): 78-81.
中华人民共和国建设部. CJJ96—2003地铁限界标准[S]. 北京: 建筑工业出版社, 2003.
史增峰. 基于移动激光扫描技术的隧道限界检测研究[D].上海工程技术大学, 2016.
王磊, 郭清菊, 姜晗. 基于改进的八叉树索引与分层渲染的海量激光点云可视化技术[J]. 软件, 2016, 37(3): 114-117
尹恒, 封全宏, 廖紫骅, 姜丽丽, 蔡继鸣.基于三维激光扫描技术的病害隧道监测[J]. 地下空间与工程学报, 2014, 10(04): 895-901.
胡琦佳. 三维激光扫描技术在隧道工程监测中的应用研究[D]. 西南交通大学, 2013.
宁德怀. 地面三维激光点云数据的滑坡变形分析与预测研究[D]. 昆明理工大学, 2017.
林永达. 隧道点云数据处理及可视化关键技术研究[D]. 东华理工大学, 2017.
猜你喜欢
昆明医科大学学报(2021年6期)2021-07-31
工程建设与设计(2021年11期)2021-07-28
科学(2020年5期)2020-11-26
小哥白尼(趣味科学)(2019年2期)2019-04-17
中华老年口腔医学杂志(2016年6期)2017-01-15
中国感染控制杂志(2015年7期)2015-12-13
中国当代医药(2015年17期)2015-03-01
铁路通信信号工程技术(2015年4期)2015-02-28
城市轨道交通研究(2015年5期)2015-02-27
发明与创新(2015年30期)2015-02-27
