
基于FlightGear/Matlab的运输类飞机飞行仿真实验设计
2019-10-08 06:09郭世广
实验技术与管理 2019年7期
王 岳,汪 磊,郭世广
基于FlightGear/Matlab的运输类飞机飞行仿真实验设计
王 岳,汪 磊,郭世广
(中国民航大学 飞行技术学院,天津 300300)
以NASA气动数据为基础,建立波音747飞机飞行仿真模型并验证,设计了可调整参数的控制器示例,利用FlightGear和Matlab软件的接口技术实时传输仿真数据,实现了飞行仿真的三维可视化,并根据课程需求开发了飞行仿真实验。经教学实践验证,仿真实验促进学生对理论的直观理解,有较高的使用价值。
FlightGear;Matalb;运输类飞机;飞行仿真实验
“飞行动力学与控制”是飞行技术与飞行安全专业硕士研究生的一门重要专业课。由于该课程内容过于抽象,学生不易理解。因此,涵盖课程知识点的实验教学非常重要[1-2]。目前,在飞行技术培训、飞行安全研究等方面普遍应用了飞行可视化仿真技术。其中开源飞行模拟软件FlightGear预留有外部数据接口,用户可以方便地进行修改和二次开发,国内外许多高校和科研机构都在使用FlightGear[3]。
1 飞行仿真方法
笔者在先期开发的教学实验系统的基础上,应用Matlab代码、Simulink开发并验证了波音747飞机六自由度非线性仿真模型及相应的增稳与飞行控制律[4]。利用FlightGear和Matlab软件的接口技术,使动力学模块外部独立运行,将飞行仿真数据实时传输,从而实现以FlightGear作为可视化引擎的飞行仿真实验。
1.1 飞机建模及验证
作为仿真实验基础的波音747动力学模型是基于NASA气动数据而建立的[5],在此模型基础之上增加了二阶舵机模型,其参数如表1所示。

表1 舵机和舵面特性
文献NASA CR-2144提供了波音747飞机多个状态下各通道响应传递函数[6],可用于与本文使用的非线性模型作为典型对比。其中,需将非线性飞机模型在相应的状态下进行配平线性化。配平状态如表2所示。

表2 模型对比配平状态
1.2 纵向特性对比
将非线性的原模型线性化,得到对升降舵偏转的俯仰角和爬升率的传递函数,与文献[7]对比,伯德图如图1、图2所示。

图1 对升降舵偏转的俯仰姿态响应

图2 对升降舵偏转的高度变化率响应
由伯德图可以判断升降舵输入指令的响应特性在带宽(0.01~10 rad/s)范围内二者非常接近,只在短周期频率范围有略微偏差。爬升率(飞行高度变化率)的低频段响应特性差别较为明显,这是一般飞行动力学建模常见的误差分布特性,因为一系列的“弱小”项共同起作用。不论人工驾驶还是自动驾驶,高度响应的低频误差很容易被反馈机制所掩盖,不会对仿真的效果造成明显影响。
1.3 横航向特性对比
将非线性的原模型线性化,得到对副翼、方向舵偏转的滚转角速率和偏航角速率的传递函数,伯德图如图3、图4所示。与文献[7]比较,横航向上两个通道符合性都较好。
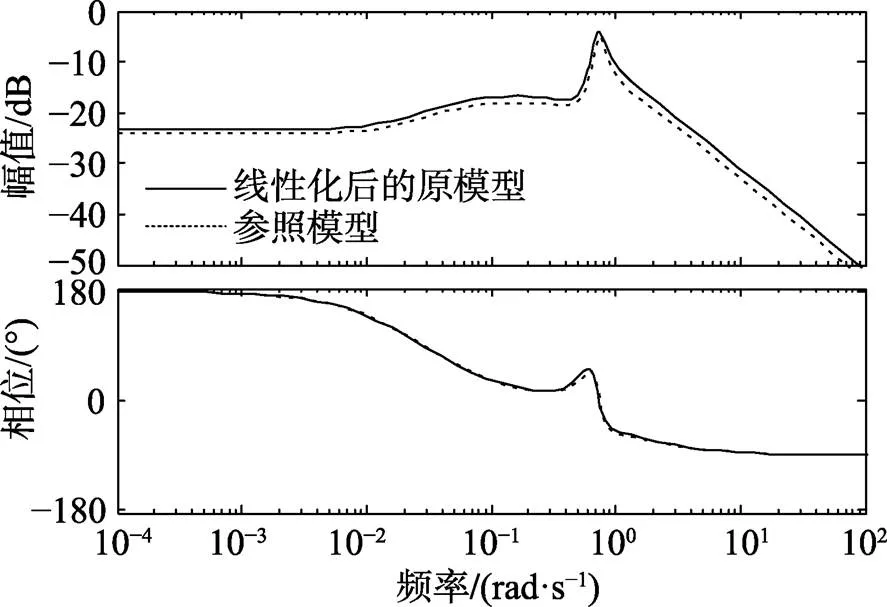
图3 对副翼偏转的滚转角速率响应

图4 对方向舵偏转的偏航角速率响应
根据典型验证可判断,目前的模型可以覆盖波音747飞机的动力学特征,可作为运输类大型飞机的典型模型。需要注意的是,目前气动数据对于进近着陆状态只覆盖到25°迎角[5],属于临近失速迎角。在仿真研究中,所有的结论将终止于这里的临近失速状态。
1.4 增稳控制律设计
在设计的仿真实验中,需要对飞机的俯仰角、滚转角等飞行参数进行精确控制;而设计一个可调整参数的控制器示例,可以让学生在实验时自行整定,并可增加实验项目。
在对飞机控制律进行设计时,采用了线性控制理论设计方法。在小扰动理论下[8],飞机的飞行状态在轻微波动时,可将非线性动力学方程简化为仅包含一次项的泰勒级数。整理后得到一次状态空间方程。依据状态空间方程和仿真实验的目标,即可进行控制律设计。例如,仿真风切变对运输类飞机影响及改出策略时,飞机的俯仰轴应具有俯仰姿态指令姿态保持的常规响应类型,由这一控制目的出发,进行控制律设计。
首先对飞机模型进行配平线性化。由于设计的仿真实验关注重点是飞机进场着陆阶段,因此配平状态选择进场着陆状态。飞机全状态空间模型经解耦后得到纵向状态空间模型。俯仰控制律设计框图如图5所示。俯仰内回路选择俯仰角速率反馈,增大系统阻尼;俯仰外回路采用俯仰角反馈,实现俯仰角指令控制。
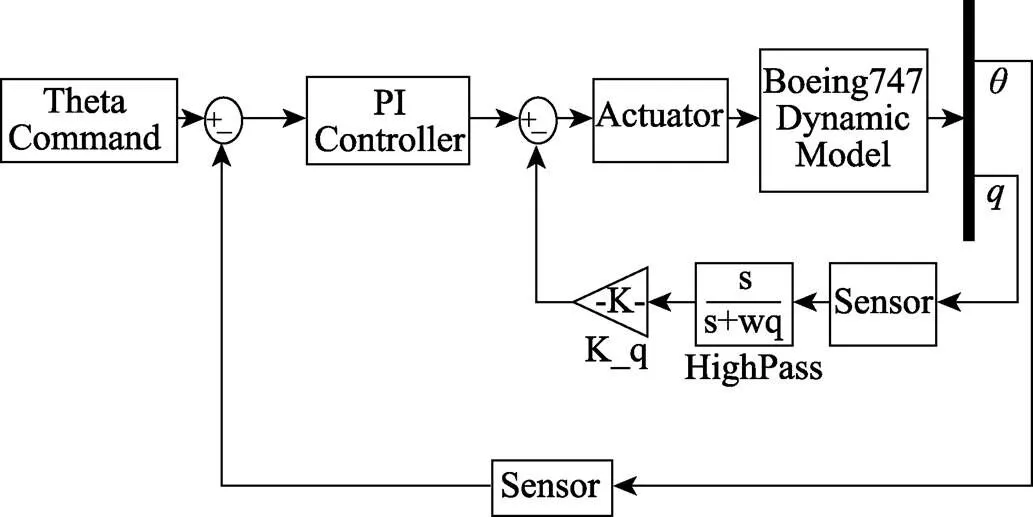
图5 俯仰控制律设计框图
图5中俯仰角速率信号的反馈仅用于增加阻尼。为了不影响飞行员的稳态操纵,信号经高通滤波器反馈至前向通道。由于B747飞机本体特性较好,不需要过大的俯仰角速率反馈增益。俯仰姿态角回路采用比例积分控制,最终设计出的PI控制器:

将设计得到的姿态角指令控制器应用在非线性模型中,可对控制器进行初步验证。将飞机在0.2 Ma、200 m高度处配平为定直平飞状态,仿真结果如图6所示。
在仿真过程中,系统于第10 s开始接收到一个幅值为4°的俯仰角方波指令信号,信号持续10 s,结束后恢复到配平姿态角。第50 s时接收到一个相反的俯仰角方波指令信号,信号持续10 s,结束后继续保持为配平姿态角。从仿真结果看,俯仰角可以很好地跟踪指令信号,实现了俯仰角指令控制功能。
横航向的控制律依然是基于小扰动理论设计的。横航向控制律的设计目标首先是使滚转轴响应特性类似于常规滚转角速率控制姿态保持类型,且方向舵可以配合滚转操纵进行协调转弯,消除侧滑角。其次偏航操纵响应具备侧滑角指令类型,并且应通过副翼的协调偏转消除侧滑过程中诱导出的滚转响应,从而使横向与航向控制充分解耦。除此之外,横航向的控制在设计过程中还需考虑消除荷兰滚模态可能带来的影响。
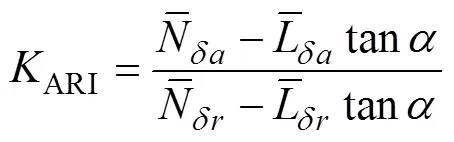
横航向控制器结构图如图7所示,图中同时包含了滚转轴与偏航轴控制。由于控制结构中包含两通道相互解耦的控制律,因此二者无法分离。滚转轴内回路为反馈增加阻尼,外回路采用滚转角反馈,形成滚转角指令控制模式。偏航轴内回路为偏航角速率反馈,外回路采用侧滑角反馈实现对侧滑角的控制指令模式。当飞机在较大迎角下机动时,副翼输入只能激发沿机体轴的旋转,迎角侧滑角交替出现,这一飞行特性是飞行员不期望的。滚转操纵应设计为绕速度矢量的旋转,实现方式是将方向舵与副翼交联控制。这一回路与偏航阻尼回路共同形成偏航轴控制内回路。交联控制参数ARI可表示为
横航向控制律调参过程与纵向相似,不再赘述。将设计得到的控制律参数应用在非线性模型中,可对控制器进行初步验证。将飞机以0.2 Ma在200 m高度处配平为定直平飞状态。在仿真过程中,15 s时刻控制器发出15°的滚转角指令,飞机开始执行协调转弯,在52 s时刻控制器发出0°滚转角指令,飞机结束协调转弯。
在图8表现的协调转弯过程中,飞机的速度、迎角有小幅波动,进入滚转之初产生了一定的侧滑,但很快侧滑角被消除。滚转角跟随指令速度较快,偏航角缓慢增大至90°。期间副翼舵面最大偏转为8°,方向舵最大偏转为6°左右,稳态消侧滑阶段方向舵用量在–3°。稳态协调转弯过程中飞机保持2°/s的偏航角速率,用了45 s完成了90°的协调转弯。仿真结果验证了横航向控制律的可用性。

图8 滚转角指令协调转弯仿真
1.5 FlightGear的连接
外部运行采用基于FlightGear的虚拟显示方案,仿真模块将波音747的飞行状态参数通过Matlab自带的通信方式实时传给FlightGear驱动三维动画显示。在外部运行模式中,由于FlightGear只作显示终端,因此FlightGear启动向导的高级选项中对默认设置要做相应的更改。FDM选项设置为external或null,表示飞行器动力学模型来自于外部。除此以外,连接时要在FlightGear软件飞机参数文件夹中存有飞机的数据参数,而且要用Generate Run Script模块来创建一个运行脚本,设置好天气、时间、地点等初始条件,从而在启动时获得满意的效果。动力学模型外部运行系统连接如图9所示。

图9 动力学模型外部运行系统连接图
2 仿真教学实验案例——进场着陆直线进近自动飞行仿真实验
目前已开发了飞行动力学与控制课程的4个教学实验:(1)进场着陆直线进近自动飞行仿真实验(演示与验证);(2)进场着陆直线进近人工飞行仿真实验(验证);(3)进场着陆反向进近自动飞行仿真实验(演示与验证);(4)进场着陆反向进近人工飞行仿真实验(验证)。本文仅以进场着陆直线进近自动飞行仿真实验为案例说明实验内容。
2.1 自动导航功能定义
进行自动飞行模拟仿真需要对飞机的高度、航迹角、姿态、侧偏距、航向角、偏航角等很多参数进行控制,要根据任务阶段的不同,选择不同的控制模式。因此,需要在现有控制律的基础上设计导航算法,以控制飞机飞行轨迹。进场着陆直线进近自动飞行仿真实验模拟首都机场标准仪表着陆程序[9]。ILS仪表进近程序如图10所示。图10绘出两种简单的仪表进近路线,从机场南侧飞至机场的航班采用的直线程序直接下滑进近,从机场北侧飞至机场的航班采用反向程序首先通场飞行,随后出航边转弯180°重新对准跑道进行下滑进近。
2.2 直线进近
为便于表达,需建立基于机场位置的坐标系,并将原点坐标定义在跑道起点处。跑道方向为轴正向,垂直向下为轴正向,轴方向根据右手定则确定。根据航路图解析出直线程序不同飞行阶段需完成的任务如表3所示。
飞行任务在仿真程序中实现后,可进行航线自动飞行仿真。仿真的初始状态为飞机在距离跑道起点30 km处、900 m高度上进行定速直线水平飞行,飞机已对准跑道。将飞机各项初始数据增加适当偏差,垂直偏差H=100 m(向上为正),水平偏差y=200 m,滚转角偏差d=10°,偏航角偏差d=20°,在这样的初始条件下,仿真结果如图11所示。
初始的偏差在50 s左右可以得到修正,并且不会对后续的进场着陆飞行产生影响。在修正初始偏差的过程中,由于初始航向与初始侧偏距同向偏离跑道,所以最大侧偏距达到360 m。修正侧偏距时最大滚转角达到了22°,副翼在较短时间内达到极偏位置10°,方向舵最大达到11°偏转。侧偏距修正快速无超调,纵向20 s内初始高度偏差被修正,全程最大升降舵偏转为15°,全程高度跟踪效果良好。

图10 首都机场ILS仪表进近程序
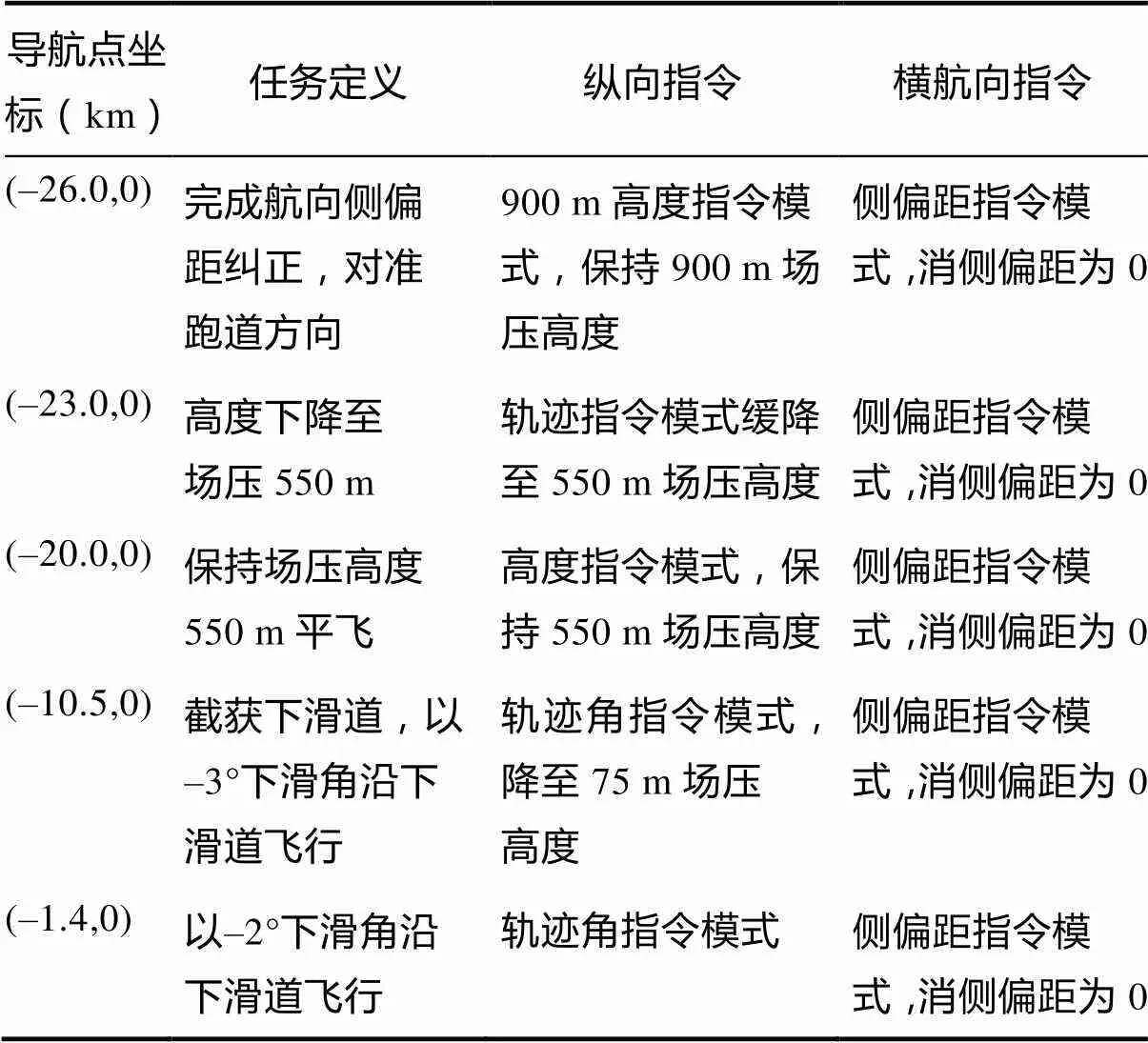
表3 直线程序任务分解
2.3 教学意义
飞行仿真实验的三维可视化显示,可使学生对课程教学知识点有更加直观的认识和理解。通过修改飞机的动力学模型参数和控制器参数,或是让学生在FlightGear中操作飞行,可以让学生认识相关参数变化对于飞行的影响。对于教师而言,这种方式有利于他们及时方便地更新和完善教学资源。

图11 直线程序飞行仿真
3 结语
使用Matlab/Simulink仿真工具、以NASA气动数据为基础开发波音747飞机六自由度非线性模型,利用FlightGear飞行模拟器提供的外部数据输入/输出接口驱动FlightGear可视化引擎,实现了飞行仿真的三维实时可视化显示。已开发的4个进场着陆阶段的飞行仿真演示与验证性实验对于“飞行动力学与控制”课程教学有较好的辅助作用,使学生更容易理解和掌握飞行动力学与控制的理论和方法。
[1] 郭卫刚,韩维,王秀霞.基于Matlab/Flightgear飞机飞行性能的可视化仿真系统[J].实验技术与管理,2010, 27(10): 110–112.
[2] 王丽梅.基于创新性应用型人才培养的实验教学方法研究[J].实验技术与管理,2014, 31(1): 19–21.
[3] 黄华,徐幼平,邓志武.基于FlightGear模拟器的实时可视化仿真系统[J].系统仿真学报,2007, 19(19): 72–74.
[4] 王岳,陈忆杭.基于FlightGear的飞行仿真教学实验设计[J].实验技术与管理,2016, 33(10): 130–134.
[5] HANKE C R, NORDWALL D R. The Simulation of a Jumbo Jet Transport Aircraft Modeling Data[R]. USA:Boeing Commercial Airplane Company, 1970.
[6] HEFFLEY R K, JEWELL W F. Aircraft Handling Qualities Data[R].California: National Aeronautics and Space Administration, 1972.
[7] HINTON D A. Flight-Management Strategies for Escape From Microburst Encounters[R]. Virginia: National Aeronautics and Space Administration, 1988.
[8] 方振平,陈万春,张曙光.航空飞行器飞行动力学[M].北京:北京航空航天大学出版社,2005.
[9] 张泽龙.商用飞行员教程[M].成都:西南交通大学出版社,2001: 116–119.
Design of flight simulation experiment of transport aircraft based on FlightGear/Matlab
WANG Yue, WANG Lei, GUO Shiguang
(Flight Technology College, Civil University of China, Tianjin 300300, China)
Based on NASA aerodynamic data, the flight simulation model of Boeing 747 aircraft is established and validated, and an example of controllers with adjustable parameters is designed. By using the interface technology of FlightGear and Matlab software, the real-time transmission of simulation data is carried out, and the 3D visualization of flight simulation is realized. The flight simulation experiment is developed according to the requirements of the course. The teaching practice proves that the simulation experiment can promotes the students’ intuitive understanding of the theory and has a higher utilization value.
FlightGear; Matalb; transport aircraft; flight simulation experiment
V249.1;TP391.9
A
1002-4956(2019)07-0129-05
10.16791/j.cnki.sjg.2019.07.031
2019-01-11
国家自然科学基金委员会与中国民用航空局联合资助项目(U1733117);天津市教育科学“十三五”规划课题(HE3072);中央高校基本科研业务费项目(3122014X002)
王岳(1983—),男,天津,在读博士研究生,讲师,主要研究方向为飞行动力学与控制、飞行技术和飞行安全.E-mail: qiushnawang@163.com
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
新世纪智能(高一语文)(2021年3期)2021-07-16
学习周报·教与学(2020年25期)2020-10-21
模具制造(2019年10期)2020-01-06
民用飞机设计与研究(2019年4期)2019-05-21
数学学习与研究(2019年5期)2019-05-08
中学生数理化·中考版(2018年10期)2018-12-07
理科考试研究·高中(2017年7期)2017-11-04
解放军健康(2017年5期)2017-08-01
