三维激光扫描技术在古建筑测量中的应用
2019-09-26 09:05郭震冬顾正东王润哲
智能城市 2019年18期
郭震冬 黄 亮 顾正东 王润哲
(江苏省测绘工程院,江苏 南京 210013)
三维激光扫描仪在发射接收装置高速转动过程中进行激光测距[1],突破了传统测绘方法的单点模式,可以快速获取待测物体表面点云,在竣工测量[2]、变形监测[3]以及建筑信息模型构建[4]等领域已经取得广泛应用。地面静态激光扫描[5]与移动激光扫描[6-7]相比,虽然速度上有所欠缺,但架设站点更自由,可以避免遮挡造成的盲区。
中国的亭台楼阁等古建筑结构很复杂[8],且部件多为非常规形状,使用GPS或全站仪等传统单点测绘方法很难获取全面准确的特征点坐标。为此,本文实现了利用地面激光扫描技术进行古建筑建模的方法流程。首先,根据古建筑的形状结构特点自由架设激光扫描仪获取多站点云数据;接着,使用ICP(Iterative Closest Point,迭代最近点)[9-10]算法将各站点云配准到统一坐标系下;最后,人机交互在点云数据中勾勒古建筑形状,以构建三维模型,生成古建筑平立剖面图。
对南京夫子庙景区江南贡院内的魁光阁、魁星亭、南院回廊与至公堂进行数据采集与建模,实验证明本文的方法流程能够恢复高精度的古建筑三维模型参数,满足建筑修缮维护与展览的应用需求。
1 方法流程
1.1 点云采集
使用徕卡ScanStation C10 三维激光扫描仪来获取点云,如图1a所示。仪器具有360°×270°扫描视角,描距离大于300 m,速度可达 5 万点/s,在100 m处的扫描密度可以达到0.3 mm,在50 m处的点位精度优于6 mm。
激光扫描仪作业过程中遵循的技术规范:(1) 《城市测量规范》(CJJ/T 8—2011);(2) 《工程测量规范》(GB 50026—2007);(3) 《房屋建筑制图统一标准》(GB/T 50001—2001);(4)《国家基本比例尺地形图图式第1部分:1∶500 1∶1000 1∶2000 地形图图式》(GB/T 20257.1—2007)。
根据古建筑的特点,激光扫描仪自由架站获取各自独立坐标系的点云,取出三站作为示例,如图1b、图1c与图1d所示。
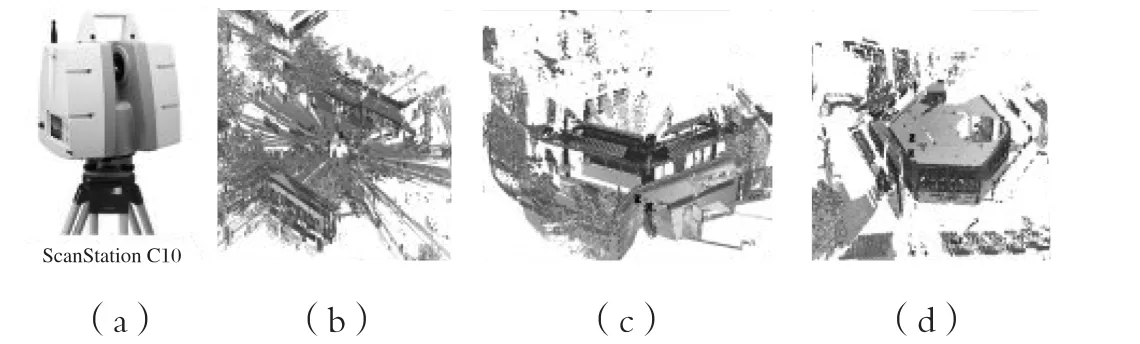
图1 原始点云
1.2 点云拼接
外业采集回来的点云都有各自独立的坐标系,使用迭代最近点算法(ICP)将其配准到同一坐标系下。ICP的主要步骤如下:

图2 配准点云
1.3 建筑建模
将配准后的点云数据导入到AutoCAD或其他建模软件中,采用人机交互的方式来绘制建筑模型的平面图、立面图以及剖面图。为了便于人眼识别点云中建筑细节,可以采用两个措施: (1)为点云显示添加渲染模式,包括按高程渲染、按强度渲染以及高程强度混合渲染;(2)对点云进行水平切片与竖直切片。建模成果在第二章节展示。
2 实验与分析
以南京夫子庙景区江南贡院内的魁光阁、魁星亭、南院回廊与至公堂作为测试数据,共包含180万个激光点,如图3所示。使用本文方法流程,绘制了四个古建筑的平面图、立面图与剖面图,如图3其中一处实例所示。成果几何精度高,点位误差接近亚厘米级,且可以精确拟合出复杂结构,如飞檐与角梁等。
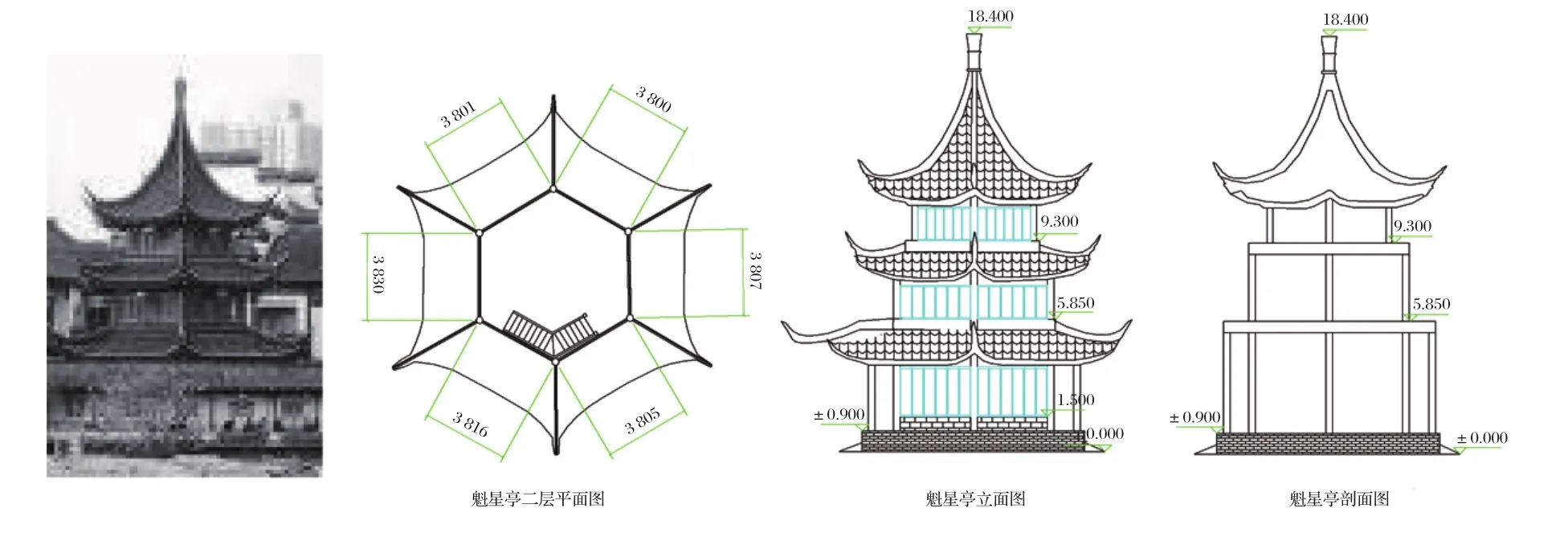
图3 魁星亭
3 结语
中国古建筑结构很复杂且形状多样,建模时如果使用传统的测绘方法采集数据,无法对其各项参数进行准确的描述。为此,本文设计了使用地面激光扫描技术进行古建筑建模的方法流程。根据古建筑的特点自由架设激光扫描仪以获取多站数据,这些数据都是在各自独立坐标系中,使用迭代最近点算法进行配准;最后,配准点云导入AutoCAD等建模软件中绘制出古建筑模型。进一步研究时要引入点云的边缘自动追踪与样条曲线拟合算法,自动勾勒出古建筑轮廓线,减少内业人员的工作量。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
学生天地(2020年31期)2020-06-01
西部资源(2019年2期)2019-11-12
动漫星空(兴趣百科)(2019年11期)2019-11-05
模具制造(2019年3期)2019-06-06
天工(2019年7期)2019-01-20
视野(2018年18期)2018-09-26
大众考古(2015年10期)2015-06-26
现代营销·经营版(2015年3期)2015-04-20
现代营销·经营版(2013年5期)2013-05-14