
汽车盲区清除系统
2019-09-25 02:44张雪锋梅聪聪孙进越
物联网技术 2019年8期
张雪锋 梅聪聪 孙进越

摘 要:针对汽车驾驶时A柱和B柱的盲区遮挡司机视野而造成诸多交通事故的问题,设计一种汽车盲区清除系统,旨在实现安全驾驶。基于STM32系列单片机设计的汽车盲区清除系统,利用超声波对头部进行定位,采用广角摄像头获取图像信息,定位成功后选取所需要的图像进行拼接从而消除视觉图像重复问题,使驾驶员在驾车时能够实时获得更加完整的视野,实现安全行车。
关键词:安全行车;盲区清除;汽车定位;图像显示;安全驾驶;STM32单片机
中图分类号:TP274文献标识码:A文章编号:2095-1302(2019)08-00-03
0 引 言
随着经济发展,汽车走进了千家万户,而行车安全也成为了汽车使用的首要问题。行车安全与汽车盲区息息相关,汽车盲区是导致车祸的一大杀手,尤其是牵引车、挂车等大型车辆的事故有不少是因驾驶员视野盲区而造成的。在诸多交通事故中,汽车盲区造成的意外事故仅中国就约占了30%,美国则约占20%。这是由于人眼生理结构、汽车设计等因素共同导致和造成的[1]。
在众多盲区中,汽车的A柱对驾驶员视线影响最大。
A柱是汽车左右前方连接车顶和发动机舱的连接柱,它承载着汽车顶盖的重量,因此具有一定的宽度,这样会在行车过程中对驾驶员的视觉造成干扰,特别是在转弯时,A柱的遮挡会形成一定角度的视觉障碍[2]。在解决汽车盲区这方面汽车制造公司也做过许多努力,但都无法推广使用,例如:将汽车的框架做成透明的材质、采用高硬度的透明玻璃来代替金属的A柱、采用三角窗结构。而汽车A柱这样的部位比较特殊,在汽车发生碰撞时可以减少汽车的受力,从而保护驾驶员和乘客的生命安全,所以需要高强度的材料。上述方法由于成本问题也无法普遍使用,导致汽车A柱盲区还在困扰着司机朋友,所以研究汽车盲区清除系统对提高驾驶安全性有重要的实际意义[3]。
本文研制一款集价格低廉、兼容性高、反应速度快、图像信息清晰[4]、图像拼接等特点于一身的基于STM32的定位透视与盲区清除系统,采用广角摄像头获取图像信息,通过定位结果选取所需要的图像进行拼接,从而消除视觉图像重复问题[5]。超声波测距方法不受光线、烟雾、电磁干扰等因素影响,精度较高,成本较低,适用于移动目标的定位[6-7]。
1 系统设计
本系统采用两个可发射变频超声波的超声波发射器和一个超声波接收器进行定位,用OV7670图像传感器获取画面,用STM32单片机处理画面和定位信息,使得屏幕实时显示具体头部位置对应的盲区画面。系统方框图如图1所示,实物图如图2所示。
2 超声波定位模型
本文采用两个可发射变频超声波的超声波发射器和一个超声波接收器进行定位。通常,超声波在空气介质中的传播距离非常短,只有几十米。目前,较短距离范围内的超声波测距系统已经在实际生活中得到了极为普遍的应用,它的测距精度可以达到厘米级[8]。但是超声波定位在高精度、低能耗方面还有待提升。为了使超声波定位系统在性能方面有进一步的提高,本系统采用NFMCW定位算法对超声波定位系统进行改进,对干扰、杂波及噪声进行抑制,有效地增强了目标信号[9],获得了更精确的定位效果,并应用在盲区清除系统[10]。
2.1 定位原理以及信号处理方案
新型调频连续波(New-style Frequency Modulated Continuous Wave,NFMCW)技術是在FMCW技术基础上加以改进的测距定位方法。
2.1.1 FMCW定位算法
FMCW接收的回波频率与发射频率变化规律相同,都是三角波规律,只是有一个时间差,利用这个微小的时间差可计算出目标距离。由于时间差很小,难以计算,精度较差,所以把时间差转换为某一时刻的频率差来计算。距离计算方法:对回波信号和发射信号的一部分进行相干混频,得到包含目标的距离信息的中频信号,然后对中频信号进行检测即可得到目标距离。FMCW示意图如图3所示。
当目标物体相对静止时,发射信号碰到目标物体后被反射回来,产生回波信号,回波信号与发射信号形状相同,只是在时间上延迟了τ(τ=2R/c)。其中:R为目标物体的距离;c为光速。发射信号与回波信号的频率差即为混频输出的中频信号频率f0,根据相似三角形的关系,由图3可以
得出:
式中:T为调制三角波周期;?F为调频带宽。将τ=2R/c代入可得
可以看出,在调制周期T和调频带宽确定的情况下,目标距离与FMCW雷达前端混频器输出的中频信号频率成正比,这就是目标物体处于相对静止的情况下FMCW雷达测距原理。
2.1.2 定位原理
系统采用NFMCW技术,其原理是发射波为高频连续波,频率随时间按照三角波规律变化。
在超声波的发射端A,B和接收端都加入定时器,信号一发出,定时器开启,在接收端接收到信号时,定时器记录当前时刻一次。变频超声波信号发生器A发出超声波信号后(此信号为频率按照一定周期变化的超声波),在接收端接收一定频率的信号(频率可以自行设定),即对收到的超声波信号进行滤波处理(选有用高频信号,去除一定程度的噪声),超声波接收端接收经过物体反射的信号S1+S2与直接由发射端发射、接收端直接接收的信号S3,对信号S1+S2和S3进行提取,得到信号的时间差信息,即经过路径S1+S2的时间t1,路径S3的时间t2。等待几毫秒(在接收端有足够的时间接收信号S1+S2和S3)之后由发射端B发射同样的信号,同理可以得到超声波接收端接收经过物体反射的信号S2+S4与直接由发射端发射、接收端直接接收的信号S5,路径S2+S4的时间t3,路径S5的时间t4。用S1,S2,S3,S4,S5表示信号传播的路径,其中路径=超声波在空气中传播的时间×超声波在空气中的传播速度。在椭圆内,通过两个距离差即可求得相应坐标。超声定位示意如图4所示。
首先通过超声波接收电路对接收到的信号进行滤波,用示波器显示之后,可以大致看到反射信号经过路径S1+S2与路径S3的尖峰状的信号。同理也可以看到反射信号经过路径S2+S4与路径S5的尖峰状的信号,将接收到的信号通过杜邦线连接到STM32单片机的引脚,在单片机内部运行NFMCW算法,得到相应的坐标。
NFMCW算法:设C的坐标为(x,y),已知:
A1与A2可由超声波接收到的数据计算得出,同时已知S1+S2,S3,S2+S4,S5的时间t1,t2,t3,t4。
若已知时间,即可求得路径:
S=v电磁波在空气中传播的速度t
在椭圆内,由圆周角定理:直径所对应的圆周角一定是90°,有:
由三角形的面积计算公式有:
由已知和式(1)、式(3)、式(5)可求得y。
对式(3)进行变形有:
将已知的S1+S2,S3的值和式(5)代入式(7),求得:
同理,由已知和式(2)、式(4)、式(6)可求得x:
2.2 电路设计
2.2.1 变频超声波发射电路
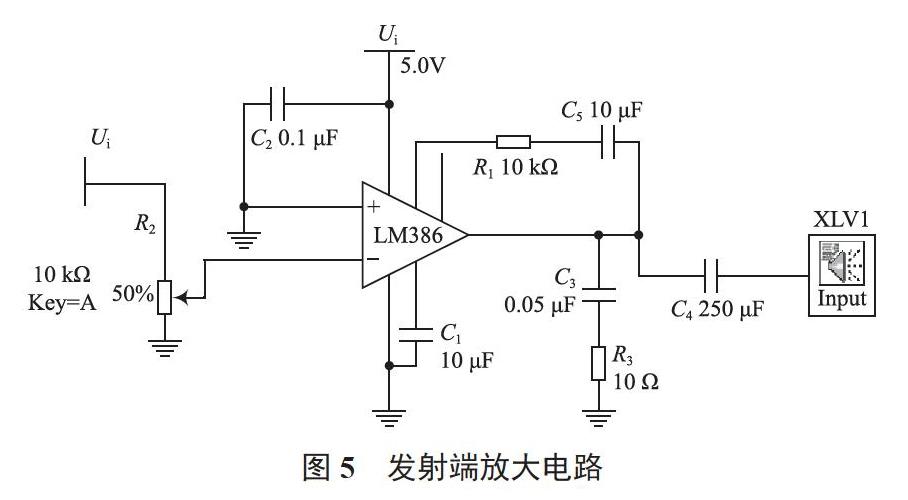
使用STM32F103單片机输出频率在30~40 kHz内反复均匀变化的电磁波(即频率从30 kHz开始,每隔几毫秒,频率增加0.5 kHz,当频率上升至40 kHz,维持几毫秒之后,频率又变回30 kHz,反复执行上述过程),之后经过功率放大电路以及滤波电路对信号进行放大、滤波,使得输出信号功率尽可能大,噪声尽可能小,来减小信号的失真。再将信号经过扬声器发出。发射端放大电路如图5所示。
功率放大电路中,Ui与单片机连接,C1为旁路电容,C2为去耦电容,滤掉电源中的高频交流成分。
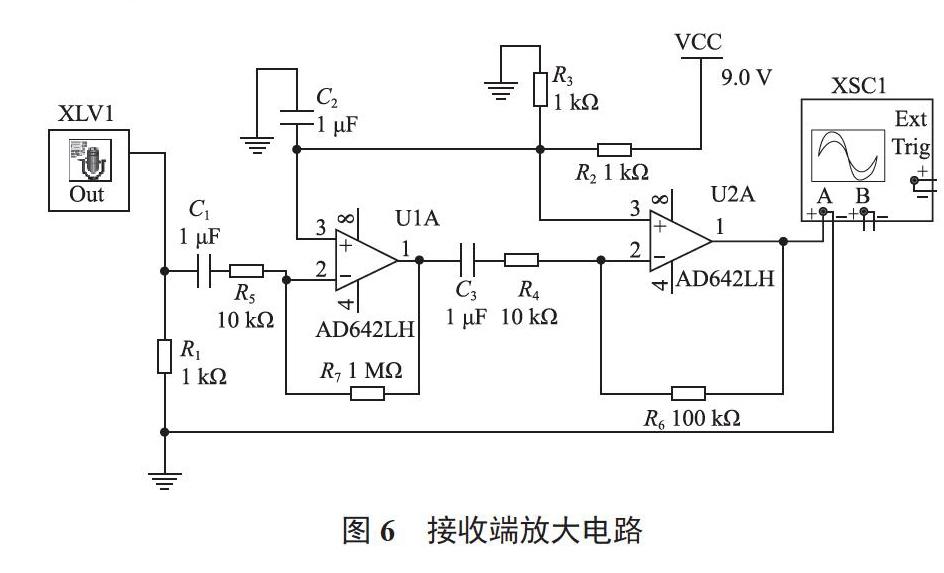
2.2.2 超声波接收电路
超声波接收端由驻极体拾音器、滤波电路、两级放大电路和示波器组成。其中驻极体拾音器将声音信号转换为电信号,接收到的信号经过选频滤波电路选出频率为40 kHz的信号,对其他频率的信号进行滤除,同时进行信号放大。接收端放大电路如图6所示。
3 显示系统
系统采用OV7670图像传感器与STM32单片机获取并处理图像。
OV7670摄像头模块如图7所示。OV7670图像传感器体积小、工作电压低,提供单VGA摄像头和影像处理器的所有功能,通过SCCB总线控制,可输出整帧、子采样、取窗口等方式的各种分辨率8位影像数据。该产品 VGA 图像最高达到30 f/s,用户可以控制图像质量、数据格式和传输方式。所有图像处理功能过程包括伽玛曲线、白平衡、饱和度、色度等,都可以通过SCCB 接口编程。OmmiVision 图像传感器应用独有的传感器技术,通过减少或消除光学与电子缺陷,如固定图案噪声、托尾、浮散,可提高图像质量,得到清晰、稳定的彩色图像。
3.1 获取画面
汽车盲区处理系统采用OV7670图像传感器获取盲区图像。此款传感器可与STM32单片机进行连接,提供帧数稳定、画面清晰的视频数据,并自带缓存可对图像进行预处理,可满足人们对视频获取的要求。再通过并行口传输至STM32单片机即可进行下一步画面的处理及截取。
3.2 画面处理
由于窗口大小的限制及模拟A柱的形状限制,要求画面必须为特定部分,通过对STM32中程序的修改(在程序中有专门控制图像大小及显示部分的变量,此变量将直接对获取到的图像进行直接控制处理)获取到理想的画面部分。
3.3 定位与盲区消除
盲区是视野中看不到的地方,OV7670将此处图像采集后,根据头部定位信息可得出眼睛所在位置,利用STM32单片机将定位点与图像截取部分一一对应,进行一对一选取显示即可完成位置与图像结合。
4 结 语
本文提出依靠头部定位进而显示对应盲区画面的汽车盲区清除系统,采用NFMCW(连续调频波)的定位方式,实现了精度高、速度快的无源定位,保证了驾驶员舒适的操作体验,同时为屏幕画面显示提供相应坐标。由STM32单片机对定位数据进行处理,根据画面拼接的方法使得A柱显示屏的显示画面与视野盲区相一致,从而解决汽车驾驶过程中的视野盲区问题,实现安全行车。
参 考 文 献
[1]袁建江,柴雷刚,林点点,等.汽车盲区检测系统[J].智能计算机与应用,2017,7(6):70-72.
[2]冯振强.汽车A柱盲区辅助观察系统设计[D].西安:西安工业大学,2016.
[3]黄凯.基于嵌入式的汽车全景环视系统的设计与实现[D].重庆:重庆大学,2017.
[4]冯泽.基于STM32的图像采集与去抖动模糊的研究[D].上海:上海师范大学,2015.
[5]阮芹.实时视频拼接系统关键技术研究[D].武汉:华中科技大学,2011.
[6]张利,秦海春,王文彬,等.超声波与航迹推算融合的智能轮椅定位方法[J].电子测量与仪器学报,2014,28(1):62-68.
[7]周先赞,熊剑,郭杭,等.基于超声波/INS信息融合的室内定位方法[J].压电与声光,2016,38(2):316-319.
[8]华蕊,郝永平,杨芳.超声波定位系统的设计[J].国外电子测量技术,2009,28(6):65-67.
[9]朱菊蕾.车载毫米波雷达信号处理算法的研究[D].成都:电子科技大学,2018.
[10]李朋.基于51单片机超声定位系统的设计[J].电脑知识与技术,2017,13(33):243-244.
猜你喜欢
科技创新与应用(2017年17期)2017-06-16
魅力中国(2016年31期)2017-06-15
科技与创新(2015年17期)2015-09-11
