
浅谈航迹控制系统(TCS)设计
2019-09-24 01:21王志恩苏珍莉
广东造船 2019年4期
王志恩 苏珍莉


摘 要:本文收集各国船级社对航迹控制系统的配置要求,介绍航迹控制系统的组成配置、接口设计、功能要求、系统报警及系统设计中需要注意的事项,分析航迹控制系统未来的发展前景。
关键词:TCS;自动舵;电子海图
中图分类号:U666.1 文献标识码:A
Abstract: This paper mainly collects the configuration requirements of various classification societies for the track control system, introduces the composition and configuration of the track control system, interface design, functional requirements, system alarm and discusses the relevant matters needing attention in the system design, and analyzes the future development prospect of the track control system.
Key words: TCS; Autopilot; ECDIS
1 前言
随着船舶自动化、智能化水平的不断提高,人们对安全便捷的驾驶方式的需求日益增大,使得航迹控制系统(简称TCS)也越来越受到船东们的重视。
航迹控制系统(TCS)是集合船位数据、航向数据、海图、气象、雷达和航速等信息,在各种状态和船舶操纵性受到一定限制的条件下,使船舶自动保持在预先计划的对地航线上航行的系统。
根据SOLAS公约(2014)要求:所有1万总吨及以上的船舶,应设有1套首向或航迹控制系统,用于自动控制和保持首向或直线航迹。
十几年前的自动化操舵系统,都是选择首向信号加上自动操舵仪来满足该项要求。但随着船舶自动化、智能化水平的不断提高,加上人工成本的上涨,船东开始追求船舶自动航行控制,减少人员的配置及减少人为操作失误带来的损失,因此不少船东要求在自动舵的基础上增加航迹控制系统。
各大船级社在其一人桥楼入级规范的相关要求中,也明确了关于TCS的配置要求,其中挪威船级社和法国船级社更是明确要求TCS要满足Category C要求。
海上安全委员会第69届会议通过的决议MSC74(69),关于TCS性能标准的建议案,明确了TCS要达到的性能标准;IEC也相应颁布了IEC62065:2002 TCS的检验标准及2014的修改补充。
2 系统的组成
TCS主要由电子海图(ECDIS)系统(包括:电子海图处理器、键盘、轨迹球和电源装置等)和自动舵系统(包括:自动舵操舵仪、操舵控制箱、反馈装置等)组成,同时还需配置满足规范要求的TCS报警装置。图1为某船的航迹控制系统的组成框图。
从图1可以看出:首向、船位、航速、风速、雷达、气象等数据需要由相关传感器发送至电子海图和自动舵。
表1为某船的TCS外部接口示意表。
3 系统的功能
根据MSC74(69)ANNEX 2的要求,TCS的启动至少需要有船位数据、航向数据、航速信息,以获取船舶的操纵权。
TCS工作模式有两种:一种是操纵船舶从当前船位到单一预设航路点;另一种是操纵船舶从当前船位沿一序列预设航路点(即航迹)航行。
TCS操纵流程为:首先船员在电子海图上进行单一航路点或航迹设置,并将自动舵设置为TCS模式;由电子海图系统接收首向信号、船位、航速、风速、风向等外部信息,计算出当前航迹与预定航迹之间的偏差;再通过电子海图处理器内部计算需要调整的首向方向,然后由电子海图向自动舵系统发出调整首向的信号,由自动舵控制舵机完成转向动作,从而实现控制船舶沿既定航迹自动航行的目的。
根据IEC颁布的IEC62065:2002航迹控制系统检验标准,TCS可以分为3个不同级别:Category A、Category B、Category C。
(1)Category A:为单一直航迹或多段不带转弯的分航迹。简言之,就是在一条直线上做航迹控制,航迹上不存在拐点;如需实施转向,则必须通过手动切换至手动操舵模式。图2为Category A航跡示意图。
(2)Category B:在完全满足Category A 的基础上,可实现多个航迹点之间带人工辅助的转弯。即航迹上可以存在拐点,实现折线航迹,但在拐点处的转弯仍需要人工辅助,且拐弯需基于预设好的拐弯半径或转向速率;当船舶航行至预设的拐弯半径点处时会有报警提示,需要船员辅助转弯。图3为Category B航迹示意图。
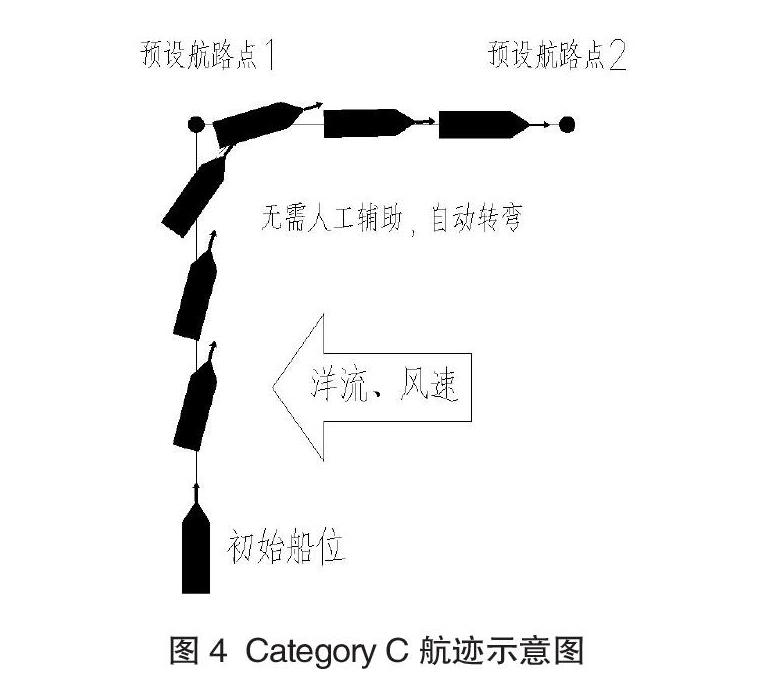
(3)Category C:在完全满足Category A 的基础上,可以实现多个航迹点之间的全自动导航,即在拐点处的拐弯全自动完成,无需人工辅助;由电子海图系统通过各输入参数(如首向、船位、航速、风向、风速等)进行计算并将转向信息发送至自动舵,由自动舵调整舵角实现平滑拐弯;同时,系统会对船舶当前航迹与预定航迹之间的偏差进行实时监测,如超出预设值会发出警报。图4为Category C航迹示意图。
4 系统报警设计
为保证航行安全,根据MSC74.(69)ANNEX 2的要求,TCS需要对下列情况进行自动报警:
(1)失电报警;
(2)船位监测报警:当船位偏差超出预设的范围时,发出报警;
(3)航向监测报警:当航向偏差超出超出预设的范围时,发出报警;
(4)传感器失效报警:当发觉系统所使用的定位信号或首向信号发生丢失或处于报警时,发出报警,并为用户提供安全操纵模式的指导;当值船员在30s内未确认失效和报警状态,向后备驾驶员发出警报。该报警建议接入桥楼值班报警系统,以便通过桥楼值班报警系统向船长、大副、二副等发出报警信号;
(5)交叉航迹报警:当实际船位偏离航线超出预定的交叉航迹限值时,发出报警;
(6)偏航报警:当实际航向与航迹方向的偏差超过预设限值时,发出报警。
(7)低速报警:当航速低于预设限值时,发出报警。
5 系统设计注意事项
(1)TCS有一定的适用范围,并不是所有的船都适合配置该系统。根据MSC74(69)ANNEX 2的要求,TCS适用于航速从最小操纵速度增加至30kn和船舶最大转弯速率不大于10°/s,对于航速太高的船舶并不适用;
(2)TCS主要是基于电子海图和自动舵系统,为保证航行安全,需要电子海图和自动舵联合设计、共同取证。在TCS证书上会注明该套系统的TCS类别,标明配套的电子海图和自动舵的厂家及型号。船级社要求必须提供相关TCS证书才允许安装;
(3)TCS需要采集各输入参数(如:首向、船位、航速、风向、风速等)进行计算,因此系统间的接口问题尤为重要。在系统设计时,需要协商好各系统间的接口信号,包括接口格式和通信协议,可参照表1。
6 系统的未来发展
对于长距离的远洋船舶来说,TCS可以大大减轻船员的负担,也减少由于人为操作失误导致的事故。
随着船舶自动化、智能化发展的趋势,单纯的TCS功能已不能满足船东多元化业务的需求。目前不少厂家已经开始在TCS功能上加入远程遥控功能,由船公司对船舶航线进行远程控制,甚至可以利用联网平台在陆上实现各船队的远程调度,实时监控各航线上的船舶航行情况并实时调整。
智能船舶、无人船的兴起,进一步推动了TCS的发展。《智能船舶规范》提出航路设计和优化,即根据船舶所具有的技术条件和性能、特定的航行任务、吃水情况、货物特点和船期计划等,充分考虑风、浪、流、涌等因素,在保证船舶、人员和货物安全的条件下,设计和优化航路、航速,使燃料消耗最低,并在整个航行期间不断优化。因此在可预见的未来,航迹控制会往智能化、自主航行和自主学习的方向不断发展。
参考文献
[1] IMO.ANNEX 2-Recommendation on Performance Standards for Track Control Systems. MSC.74 (69), 1998.
[2] LR. Rules and Regulations for the Classification of Ship. 2017.
[3] Maritime navigation and radio communication equipment and systems – Track control systems – Operational and performance requirements, methods of testing and required test results, IEC 62065. 2014.
[4] 中國船级社. 智能船舶规范[S]. 2015.
