
深海采矿船动力定位系统方案设计
2019-09-24 01:21殷文林
广东造船 2019年4期
殷文林


摘 要:本文通过对DP-2 EHS-F入级符号要求进行深入分析和理解,重点关注DP系统核心(环网和PMS的冗余性分组)内容,根据规范及故障与失效模式分析的要求,对整个配电网络进行冗余组的分配,设计出基于环形配电网络的动力定位系统(简称DP系统)方案。
关键词:深海采矿船;动力定位;冗余组;DP-2 EHS-F;功率管理系统
中图分类号:U674.98 文献标识码:A
Abstract: This paper expounds the design of a dynamic positioning system (hereinafter referred to as DP system) based on loop distribution network through the study on the requirement of DP2 EHS-F notation, and by focusing on the core of DP system, the loop power network and redundancy grouping of PMS, allocating the redundant groups of the whole power distribution network according to the requirements of the relevant rules and failure and failure mode analysis.
Key words: Deep-sea mining ship; Dynamic positioning system; Redundancy group; DP-2 EHS-F; Power management system
1 序言
全球海洋面積占地球表面积的71%,海洋不仅提供了丰富的水资源、渔业资源、航道资源和空间资源,而且海底还蕴藏有丰富的能源和矿产资源。随着人类对海底认知能力的不断进步,海底矿产资源逐渐被发现并使得开采越来越成为现实。
2015年福建马尾造船股份有限公司(以下简称马尾船厂)开始设计建造227 m深海采矿船。该项目是全球深海采矿作业领域的首制船,技术含量高、附加值大。该船总长227 m、宽40 m、深18.2 m、吃水13.2 m;居住舱室可满足199人高舒适度居住的需求;设有矿物开采、深海矿物提升系统、脱水和装卸货系统等;具有航程远、作业水域深、作业周期长、系统复杂且集成度高、可变载荷多、船舶舒适度高等特点,可持续海上定位作业长达5年。
由于深海采矿船作业时需要长时间保持在DP系统状态下,故DP系统至少需要满足动力定位2级(简称DP-2)以上的要求。这就需要对与DP系统及动力系统相关的负载进行相应的分组供电、监测和控制。本文详细描述基于环形供电网络架构下,满足DP-2 EHS-F入级符号要求的各个冗余组的分配方案以及DP系统的设计方案。
2 深海采矿船电力推进系统的参数
深海采矿船采用电力推进系统方案:全船共配置7台推进器和6台主发电机组,其中尾部配置3套全回转推进器,首部安装2套伸缩式全回转推进器和2套隧道式推进器;电网采用6.6 kV的中压环形供电网络,可以针对作业过程中的不同工况合理调整发电机的在网数量和运行时间,确保深海采矿船作业时的安全可靠性和运营经济性。电力推进系统各组成设备的详细参数,见表1。
3 DP-2 EHS-F入级符号的要求
美国船级社(简称ABS)《动力定位系统指导手册》中,描述了DP-2 EHS-F入级符号的要求:该符号涵盖了防火和进水保护的要求,同时考虑区域的风险等级,这是对DPS-2系统的补充。
从ABS对EHS-F的定义中可以看到2个重点信息:一个是需要满足防火和进水保护的要求,即物理分隔要求;另一个是需要按区域的风险等级来考虑设备布置和电缆走向。因此在机舱高危失火区域,冗余组之间需要A60分隔,包括与之相关的电缆走向也需要分隔;主DP控制站和备用DP控制站则无分隔要求,而主DP和备用DP控制系统的控制器等设备需要至少A-0分隔,主DP控制系统的网络正常区域需要A-0分隔,高危失火区域需要A-60分隔,破舱水线以下则需要水密舱壁。
除去EHS-F入级符号之外,还有EHS-P、EHS-C两个增强符号:EHS-P指对动力及推进系统的增强;EHS-C指对DP控制系统的增强。三个入级符号的侧重点不同(见表2),用户可根据实际作业的工况要求来选择相应的入级符号。
4 电气冗余组的设计方案
对于深海采矿船的DP系统而言,最重要的就是环网、功率管理系统(简称PMS)及其相关辅助系统的冗余分组,这是整个系统设计的核心。根据故障与失效模式分析(简称FMEA)对DP2的要求,深海采矿船发生单点故障时,最恶劣的情况为一台发电机组和一台推进器停止运行,在此情况下不会影响到船舶的定位能力。因此,DP2要求船上动力推进系统及其相关辅助系统至少要有2个冗余组。考虑到此项目中配电的环形供电网络有6台发电机及7台推进器,因此设计成了3个冗余组。每个冗余组包含2台发电机组和1个推进器,其中2台首部隧道式推进器可作为一个推进器进行考虑。
由于本船入级EHS-F符号,需要考虑到防火及进水保护的要求,因此需要将每个冗余组之间进行物理分隔。具体设计方案为:
(1)每2台发电机组安装在一个机舱内,共设置3个机舱,每个机舱之间满足A-60分隔及水密舱壁分隔的要求;
(2)3台尾部全回转推进器分别安装在尾部三个推进器间内,每个推进器间满足A-0分隔及水密舱壁分隔的要求;
(3)2台首部伸缩式推进器分别安装在首部三号和四号推进器间、2台首部隧道式推进器共同安装在一号与二号首部推进器间。三个首部推进器间满足A-0分隔及水密舱壁分隔的要求;
(4)自动化系统内与PMS相关的数据采集箱共6个,每台发电机对应一个,数量分配和安装位置与发电机组一致;
(5)配电板包含6.6 kV中压配电板、440 V及230 V低压配电板分为三个冗余段,分别安装在三个配电板间,每个配电间之间满足A-0分隔及水密舱壁分隔的要求;
(6)自动化系统内与PMS相关的不间断电源(简称UPS)共6个,每个PMS数据采集箱对应一个UPS,分别安装在三个配电板间。
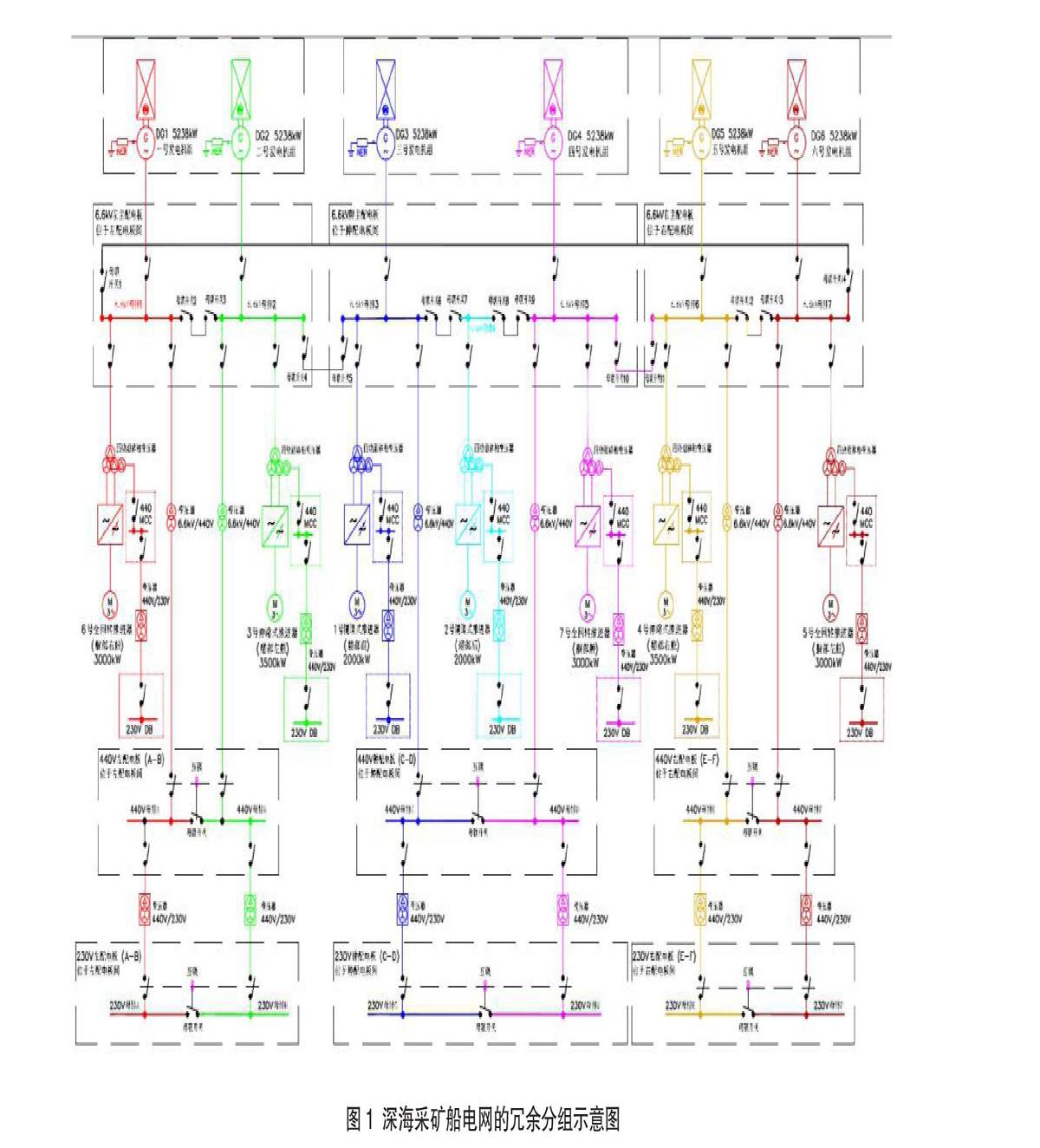
基于FMEA和DP2 EHS-F入级符号的要求,将整个配电网络及与DP系统相关设备分为三个大冗余组,每个大冗余组之间均有防火及防水的保护,确保单个大冗余组所在区域发生火灾或进水情况时不会影响到其它冗余组的正常工作和运行。
考虑到本船的设计条件:发生单点故障时,最恶劣情况只允许一台发电机组和一台推进器停止运行,故在大冗余组内(两台发电机组和两台推进器)配电板上的母排需要按照分段母排的方案来设计,即一台发电机组和一台推进器需要布置在同一母排分段上,共有两段母排,母排之间增加母联开关。也就是说,每个大冗余组内有2个小冗余组,单点故障发生时只会丢失故障所在小冗余组上一台发电机组和对应负载,只有区域着火或进水时才会丢失区域内大冗余组的2台发电机组和对应负载。
自动化系统中与PMS相关的数据采集箱、UPS、网络分配单元,也需要按上述配电网络的冗余分组情况进行考虑。6个数据采集箱和UPS分别为每台发电机服务,故分别位于对应的机舱和配电板间内。
综上所述,整个配电网络的冗余组分配,如图1所示。图1中,虚线框表示3个大冗余组,虚线框内分段母排对应各自的小冗余组。
5 DP系统的设计方案
DP系统的功能是在一定工况和环境条件下使船舶在某个定点位置的一定偏差范围内保持不动,且能够按照指令首向移动。对DP系统有影响的外部因素主要是风速、浪涌、水流及推进器推力等,DP系统能够收集这些外部因素的信息,从而控制各个推进器的推力使船舶能够按照要求保持在定点位置或者按照路线首向移动。
DP系统一般由下述系统构成:(1)动力系统。包括发电机组、配电板、推进器及其相关辅助系统等,为DP系统提供电力供应和推力支持;(2)控制系统。包含操作控制单元、位置参考系统、环境参考系统、数据收集和分析单元等,能够收集和分析各个传感器传输过来的数据,并发出控制指令。
在DP系统最核心和重要部分的冗余分组确定之后,整个DP系统的方案就可以根据相关规范及FMEA要求进行设计。深海采矿船的DP系统分为主DP系统及备用单操控DP系统,额外还有一套独立操纵杆系统(简称Cjoy系统)。
主DP系统的主要设备组成如下:2套主操作站;2套两翼操作终端;3台运动参考单元(简称MRU);3台风速风向仪;3台电罗经;1台卫星定位系统;2套高精度水下声学定位系统(简称HiPAP)及其差分全球定位系统相关天线、UPS等。
备用DP系统的主要设备组成如下:1个操作控制台;1台风速风向仪;1台电罗经;1台卫星定位系统;1台运动参考单元及其相关UPS等。
从上述设备的组成可以看出:该项目的DP系统设计方案与常规方案区别不大;从设备布置上看,主DP控制站和备用DP控制站分别位于駕驶室的后驾控台区域和前驾控台区域,中间没有物理分隔;主DP和备用DP系统的相关控制单元、UPS等电气设备,分别安装于主DP电气设备间和备用DP电气设备间。该布置符合EHS-F入级符号的要求,图2为该项目整个DP系统的拓扑图。
6 结语
随着对船舶定位精度和水深的要求越来越高,传统锚泊定位系统的局限性日益显现,而DP系统因其稳定性、安全性和可靠性的优点也越来越被市场所认可。根据每船的使用工况和设计条件不同,DP系统的设计方案也会有所不同。
本文通过对深海采矿船的环形配电网络进行分析,详细阐述了基于DP2 EHS-F入级符号要求的冗余组分配方案和DP系统设计方案。经过本文论述能够对环形配电网络及DP2 EHS-F入级符号有一个基本的概念,可为今后同类型海工船舶的DP系统设计提供参考。
参考文献
[1] 美国船级社.Guide For Dynamic Positioning System [S].2013.
[2] M3 Marine Expertise Pte Ltd. M3ME/FJMW/094-DP FAILURE MODES & EFFECTS ANALYSIS DOCUMENT [R]. 2017.
猜你喜欢
今日自动化(2022年1期)2022-03-07
工业设计(2022年1期)2022-02-09
课堂内外(小学版)(2020年5期)2020-07-20
广东造船(2020年1期)2020-05-03
中国新技术新产品(2019年5期)2019-05-21
学苑创造·A版(2017年4期)2017-05-13
学苑创造·A版(2017年5期)2017-05-09
科技创新导报(2016年31期)2017-03-30
广东造船(2016年5期)2016-12-03
航空知识(2015年7期)2015-08-08
