
基于ADAS 实验平台的自动垂直泊车研究*
2019-09-21 03:44张春洲石晶
汽车实用技术 2019年17期
张春洲,石晶
(辽宁工业大学汽车与交通工程学院,辽宁 锦州 121001)
前言
近年来,在科学技术不断进步下,高级驾驶辅助系统(ADAS)已经日渐成熟。自从ADAS 概念提出以来,各大汽车厂商及汽车设计公司已经进行研究并应用于部分实车,但由于技术不成熟,时而发生因使用ADAS 而产生的交通事故,更加深入研究ADAS 可以减少交通事故发生概率。
1 ADAS 实验平台
结合中华V3 驾驶模拟器,基于NI 设备/CarSim RT 的ADAS 实验仿真平台主要由驾驶模拟器、主控PC、实时系统、快速原型及管理PC 组成。
图1 ADAS 实验仿真平台实物
图1 为ADAS 实验仿真平台实物图,实验仿真平台可进行自适应巡航控制(ACC)、自动紧急制动(AEB)、盲点监测(BSD)、车道偏离警示系统(LDW)、交通标识智能识别系统(TSR)、自动泊车系统(APS)等方面的汽车辅助驾驶研究与开发。
2 自动垂直泊车
自动泊车技术是智能汽车技术的重要组成部分,其目的是辅助或者替代驾驶员完成车辆的安全泊位[1],可以根据有经验驾驶员的泊车方式和技巧,有效地将车辆自动驶入泊车位中[2]。车辆在垂直泊车过程中,初始位置车身方向角在正负15°之间,且随着离泊车位越近,车身方向角越大,在泊车完成时,车身方向角约为90°;泊车时方向盘打向泊车位方向,方向盘转角先增大后减小,直至完成泊车。
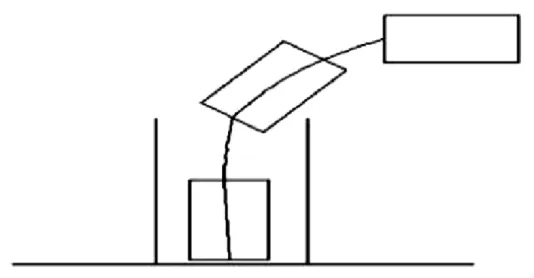
图2 自动泊车运动轨迹
图2 是自动泊车运动轨迹,驾驶员将汽车泊到与泊车位前方的垂直位置,与边线距离0.5-1 米,若车身与泊车位不平行,则首先将车身摆正;驾驶员将方向盘向右打死,继续泊车直至汽车与泊车位相平行;持续泊车直至汽车完全泊入泊车位。
3 联合仿真
ADAS 实验仿真平台的硬件环境包括驾驶模拟器、NI 系列设备,软件环境包括Labview、Carsim,采用CarSim2018软件和MATLAB/Simulink 的联合仿真。
CarSim 软件作为研究车辆系统动力学的商业化软件,其汽车模型得到了国内外学者广泛认可[3]。在Carsim RT 中进行仿真实验参数设置,例如整车模型设置、道路参数设置、导入Simulink 模型等。

图3 自动垂直泊车实验过程
是一种基于MATLAB 的框图设计环境,是实现动态系统建模、仿真和分析的一个软件包,被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中[4]。
预先在Carsim 中对自动垂直泊车场景、档位、输入输出、传感器、动画和曲线显示等进行配置,将Simulink 模型导入Carsim,构成仿真平台,进行联合仿真实验,模拟汽车的垂直泊车过程。图3 是自动垂直泊车实验过程。
4 硬件在环
ADAS 实验仿真平台将采集的制动信号、驱动信号、转向信号发送给实时系统。管理PC 将模型参数设置发送至实时系统。实时系统接收驾驶模拟器控制信号,同时向主控PC发送汽车动力学信号,向快速原型控制器发送状态信号。快速原型控制器将实时仿真、数据采集、通信协议和控制集成到一个通用的平台上,接收实时系统发送的汽车动力学信号和环境感知信号,并向驾驶模拟器发送控制指令,以实现自动垂直泊车的硬件在环。
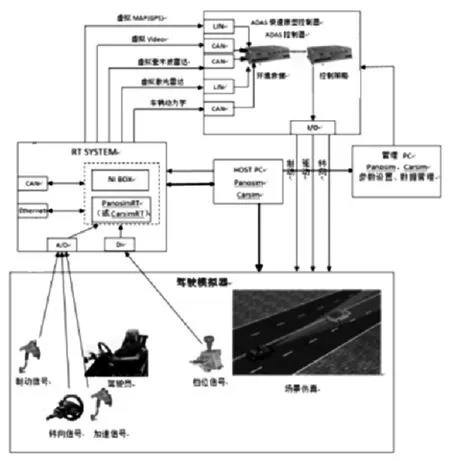
图4 工作原理
5 结论
本文根据将自动垂直泊车控制策略及算法通过Simulink建模、与Carsim 联合仿真并加载到ADAS 实验平台上,从理论上验证了方案的可行性,实验结果表明可实现平稳、顺滑的良好泊车,可以应用到不同泊车位、不同车型的自动泊车中,并提供了虚拟实车验证试验平台,为设计“自动垂直泊车”控制器提供参考依据。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年5期)2022-04-02
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
军民两用技术与产品(2020年3期)2020-04-07
科技与创新(2017年3期)2017-03-17
电脑知识与技术(2016年22期)2016-10-31
科技与创新(2015年23期)2015-12-08
