
基于激光线辅助的大型铸锻件视觉三维建模方法
2019-09-17 11:20陈昌海郭杰向守兵胡明华
科技资讯 2019年19期
关键词:三维建模
陈昌海 郭杰 向守兵 胡明华
摘 要:该文使用激光线辅助视觉三维建模方法对大型铸锻件表面信息进行三维重建,研究了逆向三维建模的主要算法,对整个三维建模流程进行了分析,并对大型铸锻件三维建模进行了扫描实验和误差分析。实验结果表明,使用激光线辅助视觉三维建模方法可以实现对大型铸锻件的高精度三维建模,当激光线扫描宽度限定为100mm内时,可以实现0.1mm的建模精度。
关键词:激光线辅助 铸锻件 三维建模 建模精度
中图分类号:TN911.22 文献标识码:A 文章编号:1672-3791(2019)07(a)-0013-03
近年来,随着工业机器人的大规模应用,人们对工业生产中进行逆向建模的需求越来越大,研究物体表面三维重建的视觉三维建模技术成为研究热点。基于双目视觉的视觉三维建模技术在商业领域有着广泛的应用,但是由于其建模精度和抗干扰能力无法满足大多数工业现场要求,使得其在工业领域的应用严重受限。基于结构光的视觉三维建模技术由于其建模精度高且抗干扰能力强,成为了当前工业现场进行三维重建的主要方法,越来越受到人们的重视。
基于结构光的视觉三维建模技术[1]可以通过激光线扫描的方式获得物体表面的三维信息。这一技术主要分为3个部分,首先是相机参数[2]和激光平面信息[3]的标定,然后是激光线條的提取和处理,最后是物体表面的三维重建。该文以大型铸锻件表面三维建模为例,说明基于结构光的视觉三维建模技术的关键技术。
1 相机参数和激光平面信息的标定
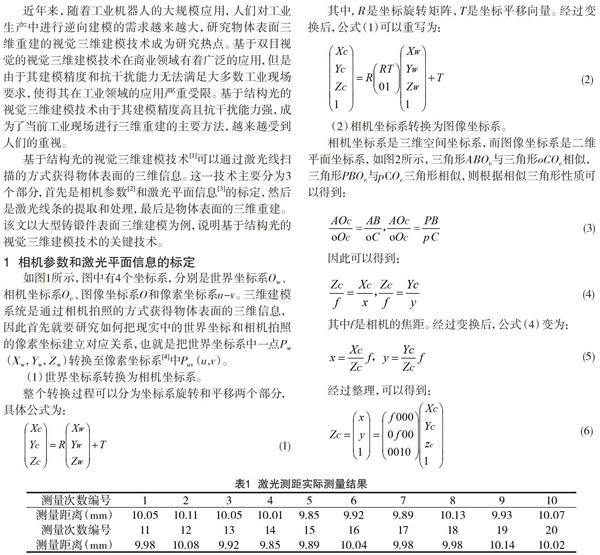
如图1所示,图中有4个坐标系,分别是世界坐标系Ow、相机坐标系Oc、图像坐标系O和像素坐标系u-v。三维建模系统是通过相机拍照的方式获得物体表面的三维信息,因此首先就要研究如何把现实中的世界坐标和相机拍照的像素坐标建立对应关系,也就是把世界坐标系中一点Pw(Xw,Yw,Zw)转换至像素坐标系[4]中Puv(u,v)。
2 大型铸锻件三维建模效果
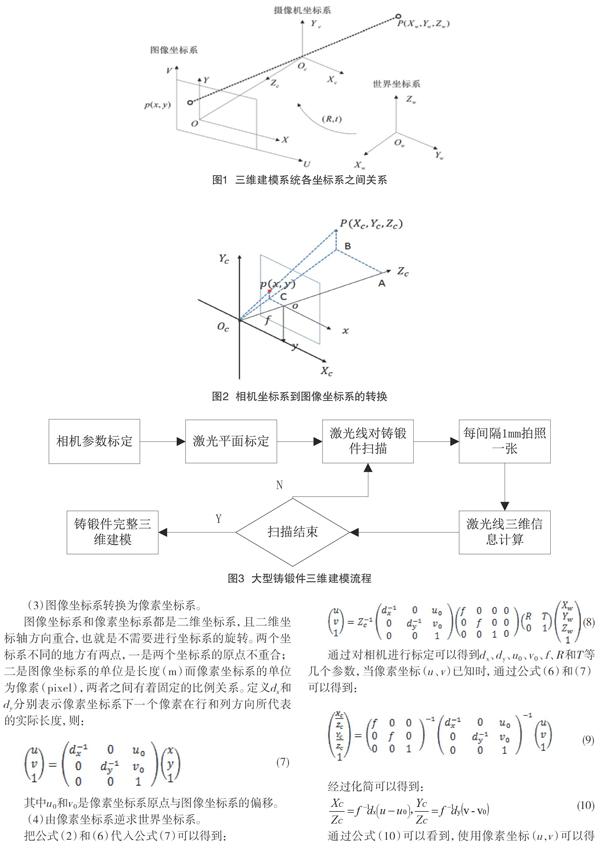
对大型铸锻件三维建模需要先进行相机参数和激光平面的标定,在获得这些基本信息后,使用机器人机械臂夹持相机和线激光发生器对目标铸锻件进行扫描。具体流程见表3。
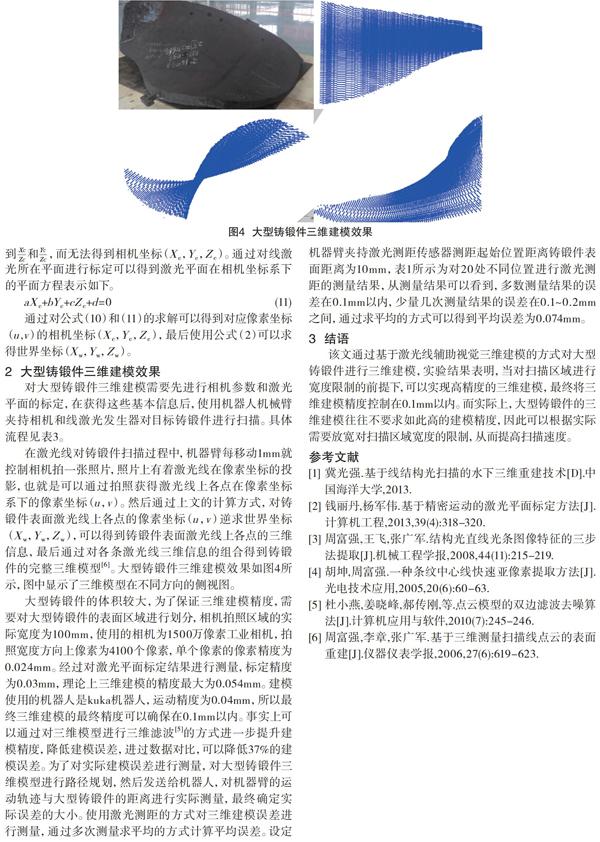
在激光线对铸锻件扫描过程中,机器臂每移动1mm就控制相机拍一张照片,照片上有着激光线在像素坐标的投影,也就是可以通过拍照获得激光线上各点在像素坐标系下的像素坐标(u,v)。然后通过上文的计算方式,对铸锻件表面激光线上各点的像素坐标(u,v)逆求世界坐标(Xw,Yw,Zw),可以得到铸锻件表面激光线上各点的三维信息,最后通过对各条激光线三维信息的组合得到铸锻件的完整三维模型[6]。大型铸锻件三维建模效果如图4所示,图中显示了三维模型在不同方向的侧视图。
大型铸锻件的体积较大,为了保证三维建模精度,需要对大型铸锻件的表面区域进行划分,相机拍照区域的实际宽度为100mm,使用的相机为1500万像素工业相机,拍照宽度方向上像素为4100个像素,单个像素的像素精度为0.024mm。经过对激光平面标定结果进行测量,标定精度为0.03mm,理论上三维建模的精度最大为0.054mm。建模使用的机器人是kuka机器人,运动精度为0.04mm,所以最终三维建模的最终精度可以确保在0.1mm以内。事实上可以通过对三维模型进行三维滤波[5]的方式进一步提升建模精度,降低建模误差,进过数据对比,可以降低37%的建模误差。为了对实际建模误差进行测量,对大型铸锻件三维模型进行路径规划,然后发送给机器人,对机器臂的运动轨迹与大型铸锻件的距离进行实际测量,最终确定实际误差的大小。使用激光测距的方式对三维建模误差进行测量,通过多次测量求平均的方式计算平均误差。设定机器臂夹持激光测距传感器测距起始位置距离铸锻件表面距离为10mm,表1所示为对20处不同位置进行激光测距的测量结果,从测量结果可以看到,多数测量结果的误差在0.1mm以内,少量几次测量结果的误差在0.1~0.2mm之间,通过求平均的方式可以得到平均误差为0.074mm。
3 结语
该文通过基于激光线辅助视觉三维建模的方式对大型铸锻件进行三维建模,实验结果表明,当对扫描区域进行宽度限制的前提下,可以实现高精度的三维建模,最终将三维建模精度控制在0.1mm以内。而实际上,大型铸锻件的三维建模往往不要求如此高的建模精度,因此可以根据实际需要放宽对扫描区域宽度的限制,从而提高扫描速度。
参考文献
[1] 冀光强.基于线结构光扫描的水下三维重建技术[D].中国海洋大学,2013.
[2] 钱丽丹,杨军伟.基于精密运动的激光平面标定方法[J].计算机工程,2013,39(4):318-320.
[3] 周富强,王飞,张广军.结构光直线光条图像特征的三步法提取[J].机械工程学报,2008,44(11):215-219.
[4] 胡坤,周富强.一种条纹中心线快速亚像素提取方法[J].光电技术应用,2005,20(6):60-63.
[5] 杜小燕,姜晓峰,郝传刚,等.点云模型的双边滤波去噪算法[J].计算机应用与软件,2010(7):245-246.
[6] 周富强,李章,张广军.基于三维测量扫描线点云的表面重建[J].仪器仪表学报,2006,27(6):619-623.
猜你喜欢
软件导刊(2016年12期)2017-01-21
东方教育(2016年21期)2017-01-17
计算技术与自动化(2016年4期)2017-01-11
中小企业管理与科技·上旬刊(2016年12期)2017-01-05
科学与财富(2016年15期)2016-11-24
电脑知识与技术(2016年24期)2016-11-14
商(2016年30期)2016-11-09
科技视界(2016年16期)2016-06-29
科技视界(2016年16期)2016-06-29
科技视界(2016年8期)2016-04-05
