
两种CFAR算法的比较与DSP实现
2019-09-17 11:20王丁一杜力李硕
科技资讯 2019年19期
王丁一 杜力 李硕
摘 要:在不同的参考背景条件下,雷达恒虚警的实际检测性能往往也会有很大的不同。当参考背景单元呈现为瑞利分布时,GO-CFAR有着最好的检测性能。但在多目标同时存在的干扰环境下,GO-CFAR的检测性能会随着干扰点的增加而迅速下降。基于有序统计量的OS-CFAR具有良好的抗干扰能力,因此在有多目标干扰的条件下,选择OS-CFAR可以获得最好的检测性能。该文使用MATLAB分析了两种检测方法的性能,并且用DSP分别进行了工程实现与检测性能对比。
关键词:双边检测比较恒虚警 有序统计恒虚警 检测性能 数字信号处理器
中图分类号:TN95 文献标识码:A 文章编号:1672-3791(2019)07(a)-0011-02
在一个雷达系统中,检测往往扮演着重要的角色。现阶段检测的方法有很多种,但每个方法都有着一定的特殊性,因此选择合适的检测算法变得尤为重要。在大多数的情况下,经典的单元平均选大GO-CFAR可以满足检测要求。但在CFAR参考单元中出现多目标干扰与同一目标跨单元分布的情况时,GO-CFAR的检测性能会大大下降。针对这种情况,使用OS-CFAR检测可以获得最佳的检测性能,它具有良好的抗多目标干扰能力[1]。
1 GO-CFAR算法模型
GO-CFAR是一种均值类CFAR检测方法,其在杂波边缘环境中能保持良好的虚警控制性能,但在多目标检测的环境中有可能出现“目标遮蔽”的现象[2]。
GO-CFAR即两边求平均后取大比较,具体操作为如下步骤[3]:
(1)分别对左、右两边边的N个参考单元求和后取平均值,得到C1、C2。
(2)比较C1与C2的大小,取二者的大值C作为比较参数。
(3)用C与门限系数α相乘,得到结果K与检测目标相比较。
(4)若K小于检测目标,则判定为目标,反着则不认为是目标。
2 OS-CFAR算法模型
OS-CFAR属于有序统计类CFAR检测方法,OS类检测方法在多目标环境下拥有较好的分辨能力,能同时完成对多目标的检测,其这一点上比均值类检测方法具有良好的优势[2]。
OS-CFAR具体检测流程如下[3]:
(1)对左、右两边的参考单元进行从大到小的排序。
(2)选出第K个最小值Z,并将其与门限系数α相乘,得到比较值T。
(3)将比较结果T与检测目标进行比较,若其小于目标,判定为目标,反之则不认为是目标。
3 两种算法在不同条件下性能的比较
在不同的环境下,GO-CFAR与OS-CFAR的检测性能有着一定的不同,在两种不同的情形下使用MATLAB对两种检测方法进行了对比,以此明确二者的性能。
情景一:仅有一个目标存在的单目标检测。
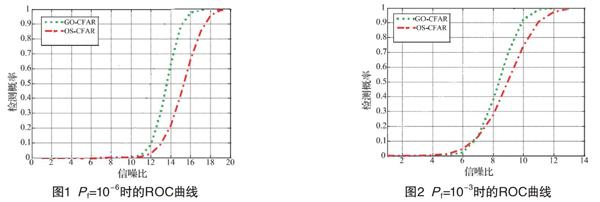
当一次检测中仅存在一个目标是,在CFAR算法的虚警率分别为10-6与10-3的情况下,GO-CFAR与OS-CFAR的ROC曲线如图1、图2所示。
通过图1、图2的ROC曲线对比,可以得知:当仅有单目标存在时,为拥有相同的检测性能,OS-CFAR所需的信噪比要比GO-CFAR高。因此在单目标存在的环境下,GO -CFAR的检测性能要略优于OS-CFAR。
情景二:一次检测中存在两个信噪比恒定的目标时。
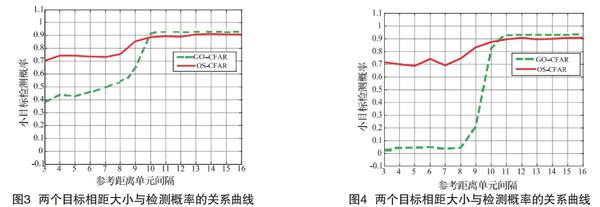
当一次检测存在两个信噪比不同但是恒定的目标,其中一个是较大的目标,另一个是较小的目标。检查过程中,保护单元为2个、参考单元为10个时,GO-CFAR与OS-CFAR的检测概率与目标间隔距离的关系如图3、图4所示。
通过图中的数据,可以得到如下的结论:
(1)当两个目标之间相距的间隔较近时,OS-CFAR的检测概率要明显高于GO-CFAR的检测概率。这是由于两个目标的信噪比不同,大的信号会使一边的平均值增大,从而導致整体比较值的变大,这就会使得小信噪比的目标被漏掉。但使用OS-CFAR却不会有这种问题产生。
(2)当两个目标之间相距的间隔较远时,OS-CFAR与GO-CFAR的对于相同的两个目标的检测概率基本相同,二者的检测性能基本一致。
4 两种CFAR检测方法在DSP中的实现
此文中使用TMS320C6678这款DSP作为CFAR检测的处理器。芯片内部拥有拥有8个独立的核,是一款运算能力极其强大的数字运算芯片[4]。
(1)GO-CFAR DSP实现的关键点。
为了最大限度地提高计算效率,GO-CFAR的左、右两边比较值C1、C2应由划窗法进行求取。即在第一次计算时,分别计算出左边参考单元的数据总和SUM1,与右边参考单元的数据总和SUM2,在之后的计算中,分别使用SUM1、SUM2减去其最左边的一个参考单元数据,并加上最右边的参考单元数据,以此进行划窗计算处理,从而使得整体计算效率达到最高。
(2)OS-CFAR DSP实现的关键点。
OS-CFAR是一种基于排序的检测方法,在DSP中,如果频繁地进行数据大小比较与排序是十分缓慢的。为了提高计算效率,在工程运用中往往使用简易版的OS-CFAR进行目标检测。其具体流程为:当选定一个检测单元后,分别同左、右两边参考单元中每一个数据进行比较,统计总共有多少个参考单元中的数据小于检测单元数据,当统计的个数大于一个门限值后,则判断当前的检测单元是一个目标,反之则认为其不是一个目标。
5 结语
不同的CFAR检测方法在不同的检测环境下具有不同的检测性能,以此文中的两种检测方法为例,GO-CFAR的多目标抗干扰检测能力较差,其适用于单目标检测,但它的检测时间较短,检测效率较高。OS-CFAR可以避免多目标干扰,检测性能整体也不错,但它的检测耗时却比较长。因此在实际工程应用中,针对不同的环境选择合适的检测方法是十分必要的。
参考文献
[1] 丁鹭飞,耿富录.雷达原理[M].北京:电子工业出版社,2014.
[2] 何友,关键.雷达目标检测与恒虚警处理[M].北京:清华大学出版社,2011.
[3] 张明友,汪学刚.雷达系统[M].北京:电子工业出版社,2011.
[4] 王俊,张玉玺.DSP/FPGA嵌入式实时处理技术及应用[M].北京:电子工业出版社,2015.
