未来尖端机器人一般原则:液体集成(I-LIFE)
2019-09-17 08:03
传感器世界 2019年6期
Advanced Intelligent Systems杂志6月以封面故事报导了中国科学院理化技术研究所与清华大学联合科研小组的一项研究成果—一种旨在为未来尖端柔性机器人研究建立的一般原则——液体集成(Intelligent Liquid Integrated Functional Entity: A Basic Way to Innovate Future Advanced Biomimetic Soft Robotics)。这项研究是基于长期以来对液态金属变形效应、经典流体研究特别是液态金属在柔性机器人领域的基础探索完成的。
自然界动物无与伦比的运动能力,长久以来始终激励和启发着人类去打造更为先进的机器人。将人造机器与自然所创造的生命作一对比,就会发现后者体系内总是充满了大量液体成分,从根本上将生物界与了无生气的机器界区别开来。那么,要研制前所未有的性能卓越的仿生柔性机器人,或许应该深刻领悟到生物体液系统所提供的重大启示。最近,联合小组在这一全新机器人设计原则与基础技术理念的认识上取得突破。
研究人员指出,自然界众多巧夺天工的水相内环境生命设计策略完全值得充分借鉴和效仿。沿此基本思想,可发展出一系列变革性机器人设计思路,未来柔性机器人体内将拥有一系列如同生命体系那样贯穿全身的液体功能单元,并能以无缝方式将整个机体及功能集成到一起,作者为此将其命名为智能液体集成功能体(Intelligent Liquid Integrated Functional Entity,I-LIFE),其缩略语也取“我-生命(I-LIFE)”之意。如果说传统的硅集成电路是固体集成的话,这里的集成则属于液体集成,二者目标均在于借助某种统一载体将各种功能单元集成到一起,不同的是,前者形成的是芯片,后者则实现的是机器人高级功能单元,类似于仿生型“组织体液”、“血液循环系统”、“组织”、“器官”等。
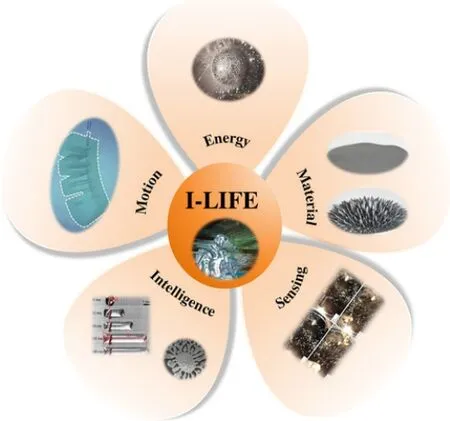
阐明机器人液体集成理论体系,论文从五方面代表性功能即:运动、能量供应、结构调控、传感和智能控制等进行了论述,并系统讲解如何将液体系统充分介入到各层面,以发挥特定作用的问题。论文进一步列举了可作为I-LIFE候选液体的潜在对象,如:磁流变液体、液态金属、离子液体和水等,并解读了对应流体的技术应用特点。最后,对I-LIFE引申出的理论与技术挑战进行了剖析,并指出了未来发展的方向。
总体来说,液体集成(I-LIFE)的提出,可望促成柔性机器人研制理念的变革,在此方向上今后还有望发展出更多的理论与技术路线,从而为研制接近动物和人体功能的全新一代尖端柔性机器人打下坚实基础。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
护理实践与研究(2021年6期)2021-04-22
文化创新比较研究(2020年7期)2021-01-13
阅读与作文(英语高中版)(2019年8期)2019-08-27
科学中国人(2018年8期)2018-07-23
天然产物研究与开发(2018年3期)2018-05-07
酒·饮料技术装备(2018年1期)2018-04-28
资源再生(2017年3期)2017-06-01
中国塑料(2015年5期)2015-10-14