
三维可视化系统应用
2019-09-17 08:28彭燕青董文煜吴德聪王佳琪
电子技术与软件工程 2019年16期
文/彭燕青 董文煜 吴德聪 王佳琪
随着数字城市、智慧城市的快速发展,三维空间技术在各领域得到了广泛应用,逐渐改变了人们的生活方式。相比于二维空间技术,三维空间主要利用三维激光扫描技术进行三维空间数据的采集,构建三维场景,可给人们最直观、真实的感受,给用户展现更真实的地理空间关系。因此在三维空间技术的研究中,三维可视化技术是其中一项很重要的研究内容。关键因素在于三维模型的建立与三维空间数据的整合。通过三维激光扫描从而进行模型构建,同时利用数据库进行空间数据整合,解决由于三维数据的来源广泛、资料分散、时间跨度大、格式复杂等问题,从而实现真正的可视化管理。
1 三维空间模型的建立
1.1 三维激光扫描技术
三维激光扫描技术又称实景复制技术,主要利用激光测距的原理,对实景进行大面积、高分辨率的采集。具有非接触测量、采样率高、高精度、高分辨率、环境适应能力强等优越性能,突破了传统的测量方法,是快速建立物体三维模型的一种全新技术手段。该技术在安防、智慧城市、城建规划等领域都有广泛的应用。本系统主要利用Focus3D X330三维激光扫描仪对实景进行扫描,从而获得点云数据。
1.2 三维模型构建
1.2.1 三维激光扫描及数据预处理
在进行实景扫描时,主要根据周围环境选择相应的测站点,布设标靶点,绘制一张点位分布图并对测站编号,同时根据测站点架设扫描仪,进行实景三维激光扫描。但由于进行三维激光扫描时,因机器误差、扫描盲区、环境、天气、物体结构等因素,会导致获取的点云数据存在一些噪声点、空洞等,严重的影响点云数据拼接精度。而点云数据的拼接精度决定模型的精度,而且点云数据相对离散,因此点云数据的预处理至关重要。对点云数据的预处理流程主要包括点云配准、去噪、去滤波、压缩等,进而获取完整的三维点云数据。通过将不同站点扫描到的点云数据拼接在同一个扫描坐标系下,利用基于特征的配准算法,通过扫描物体的明显特征来解算变换参数,并对所获得的点云数据采取噪声检测与去除的研究设定,从而提高点云数据精度,使得数据拼接的误差更小。
1.2.2 点云数据的拼接与模型构建
点云数据的拼接是点云数据处理的重要环节,拼接方法主要有基于标靶拼接、几何特征拼接、控制点三维坐标拼接等。其中基于标靶拼接法是最简便的拼接方法,也是目前市场上使用最多的一种。因此通过对点云数据预处理之后,将处理后的点云导入scene(Focus3D X330激光扫描仪配套点云数据处理软件)软件中,提取标靶点,利用标靶拼接原理,以其特征为基础,进行定位管理,最后进行模型细节处理,从而拼接合并为完整的三维场景,实现扫描场景的三维重建。
1.3 三维建模方法比较
目前,市场上对三维模型进行构建的方式主要有:3Dmax、CAD、SCENE、点云数据三维实景、倾斜摄影建模等,它们各自都有自己独特的优势,部分比较如表1。
通过对以上市场上使用最多的几种方法比较后,发现点云数据三维实景建模方式精度高、效果好、真实度高,点云数据拼接时间快,是目前建模的最佳选择,唯一不足的就是点云数据采集时间长,模型格式需要转化为3Ds等格式才能导入平台进行使用。
2 基于三维空间信息的可视化系统设计
2.1 系统结构设计
系统主要基于B/S架构,结构采取多层分布式的结构,主要分为感知层、数据层、传输层、应用层。感知层包含各种感知终端,进行物体识别、信息采集,利用数据采集底板采集传感器信息,并与监控对象相连。数据层则是各种采集的数据、地理信息以及三维模型数据等,从而实现空间信息数据统一管理,同时对采集底板采集上来的数据进行解读和判断。传输层则主要运用物联网技术进行数据传输,通过通信模块将解读出来的数据发送到协调器中,从而传递给各PC端网关。应用层层则是系统等主要部分,以三维空间模型为依托,信息数据为纽带,实现三维可视化平台的呈现。系统结构如图1所示。
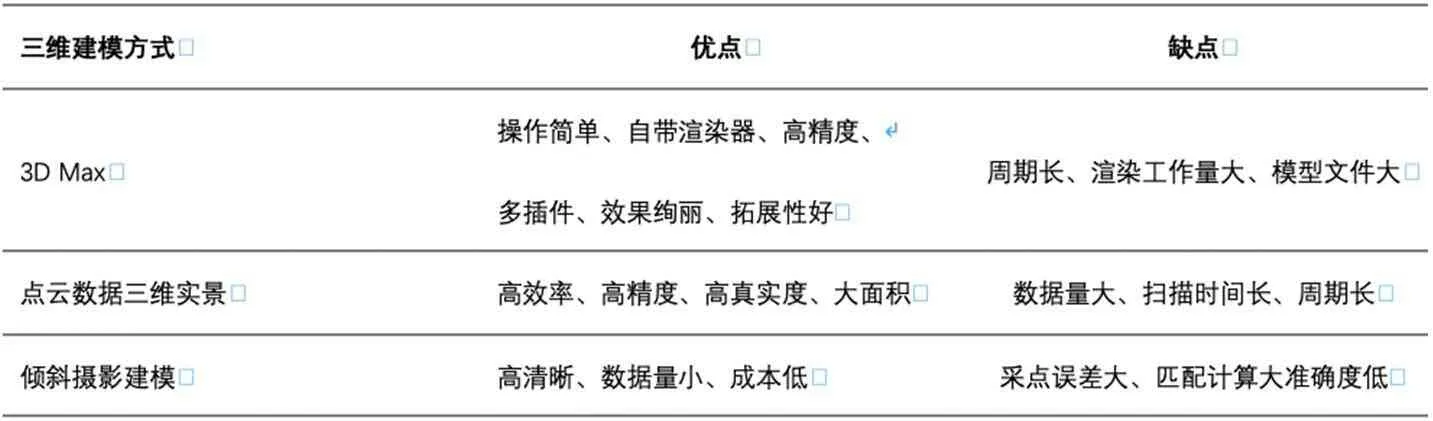
表1
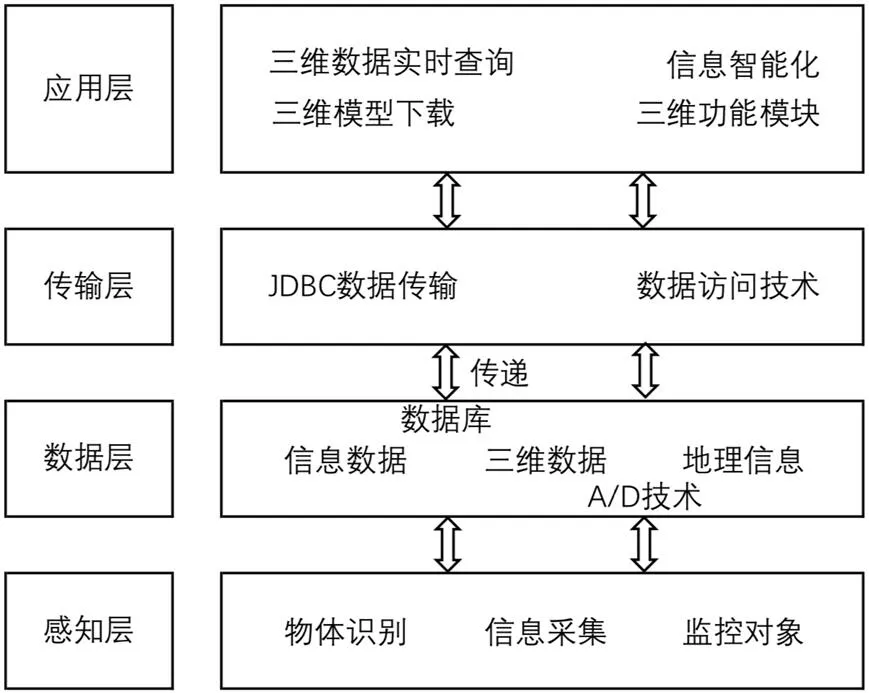
图1:系统结构设计图
2.2 数据采集模块设计
本系统主要采用多个数据采集模块相结合方式,从而实现数据的高效传输。其中大部分数据采集模块主要由两个部分组成,分别是:数据采集、数据处理。其中数据采集部分主要利用各种传感器进行数据采集,通过无线网络传输进入数据处理终端与计算机的存储器中;数据处理部分主要就是将传感器采集上来的数据进行A/D转换,并将数据进行临时存储、处理;数据传输部分则主要通过无线网络将数据传输进行系统协调器,从而实现数据的显示。
2.3 信息数据无线传输设计
各种传感器采集上来的信息数据经过处理后,传输进入协调器中,协调器讲解析道道信息数据以无线网络传输给相关网络基站,基站以TCP/IP的处理方式发送给网关,网关再发送到后台三维可视化系统,从而完成三维信息数据的传输。
3 基于三维空间信息的可视化系统实现
随着三维空间技术研究和应用的不断深入,二维世界已经无法满足社会的需求,安防、建筑等相关领域对空间可视化的探索更为迫切,因此三维可视化系统的实现极大的实现了三维场景的交互和共享,信息数据的传输与分析。
3.1 模型自由导入与伸缩
通过采用激光扫描技术与三维模型构建技术,首先将扫描获取的点云数据构建出场景三维模型,并将三维模型结构转化为可视化平台能够识别的格式,主要为3ds、obj、mesh等格式,利用three.js库里封装了三维模型导入的接口,实现模型导入平台之中,形成真实的三维景观。将模型导入平台之后,运用three.js特有的视角转换技术,调用接口,实现视角的转换与缩小,使其能与系统进行自由缩放。
3.2 空间数据同步
通过对三维可视化模型进行标注,添加一些矢量要素信息,并挂接在模型的相关节点上。同时,通过前端多结构化数据的对接,利用分布式数据采集获取数据,将各种传感器采集上来的数据,进行整理、转化、修复、渲染,并将数据存储进数据库。最后通过PHP页面链接数据库,调用$id=$_POST[‘id’];函数,访问数据库文件,查询相应数据并返回前段时间,从而实现数据的导入导出,使挂在模型节点上的相关数据实时显示,达到数据同步,确保了可视化系统的全面与具体。
3.3 信息智能化
系统以三维空间模型为基础,信息数据为纽带,用PHP技术调用数据库文件,将分布在空间的各种信息数据进行统一管理,使其可以能随时对数据进行调用。推动空间数据向着集成化、动态化、智能化发展。同时利用各种大数据分析挖掘技术架构,对相关数据进行深度的分析与挖掘,实现动态预警、查询等,达到真正意义的可视化、智能化。
4 结语
本文采用三维激光扫描、点云数据构建、物联网等技术结合PHP、JavaScript、HTML程序设计语言的方式,利用三维空间模型与三位空间数据的交互,实现基于三维空间信息的可视化平台。解决了信息数据量大、信息分散、传输时间跨度大等问题,给人一种身临其境的感觉,实现了空间信息数据实时查询、分析、全方位的监控与防护等。为智慧城市、小区安防、环境监控等领域提供了一种新的技术平台。
猜你喜欢
世界科学技术-中医药现代化(2022年3期)2022-08-22
江苏安全生产(2022年5期)2022-06-16
云南化工(2021年8期)2021-12-21
华人时刊(2021年23期)2021-03-08
海洋信息技术与应用(2020年1期)2020-06-11
传媒评论(2019年4期)2019-07-13
阅读(科学探秘)(2018年4期)2018-05-14
北方音乐(2017年4期)2017-05-04
学生天地(2016年33期)2016-04-16
四川师范大学学报(自然科学版)(2015年1期)2015-02-28
