
基于面阵单光子探测器的激光三维成像
2019-09-17 08:28葛鹏郭静菁尚震
电子技术与软件工程 2019年16期
文/葛鹏 郭静菁 尚震
1 前言
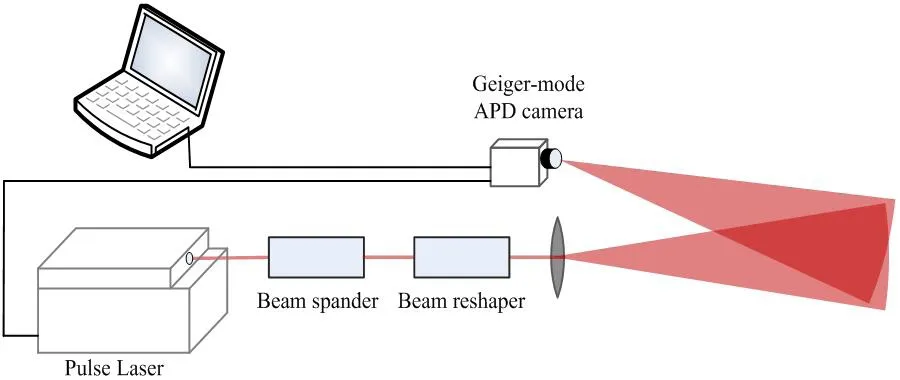
图1:激光三维成像实验装置原理图
激光雷达为主动光电探测系统,其工作波长短,相对于微波雷达能够实现较高空间分辨率与测距精度。然而在较远距离应用中,受发射功率、大气传输损耗、接收孔径等因素的限制,激光雷达接收的回波能量十分微弱,常规光电探测器难以有效检测微弱信号,而单光子探测器以极高探测灵敏度,被广泛用于微弱回波信号测量。基于单光子探测器能够实现远距离的探测与成像,其空间分辨率可通过逐点扫描 或探测器阵列来获得。逐点扫描方式中,激光不断地往返于系统与目标之间,进行大规模成像耗时严重。基于大规模面阵探测器,发射少数脉冲可获得视场的高分辨率信息,具有较高成像效率,是一种较为理想成像方式。
单光子探测器主要用于脉冲法直接探测,系统发射脉冲激光,并测量返回脉冲的飞行时间来实现三维成像。单光子探测器具有单光子探测灵敏度,但无法分辨光子数,为此系统中单像元单脉冲探测的光子数往往小于1,像元对回波脉冲进行概率性探测,并通过脉冲累积来提高探测概率。光子探测过程记录的为离散的光子数据,需要用泊松噪声模型描述。
2 实验装置
该实验装置原理图如图1所示,其利用了激光泛光照明方式,激光发射和接收采用了分离的光学孔径。高功率固体激光器产生波长1064nm、重复频率1kHz、脉宽500ps、能量80uJ的激光脉冲。针对每个激光脉冲,通过高速光电探测器精确测量其出射时刻,用作脉冲飞行时间测量的初始值。
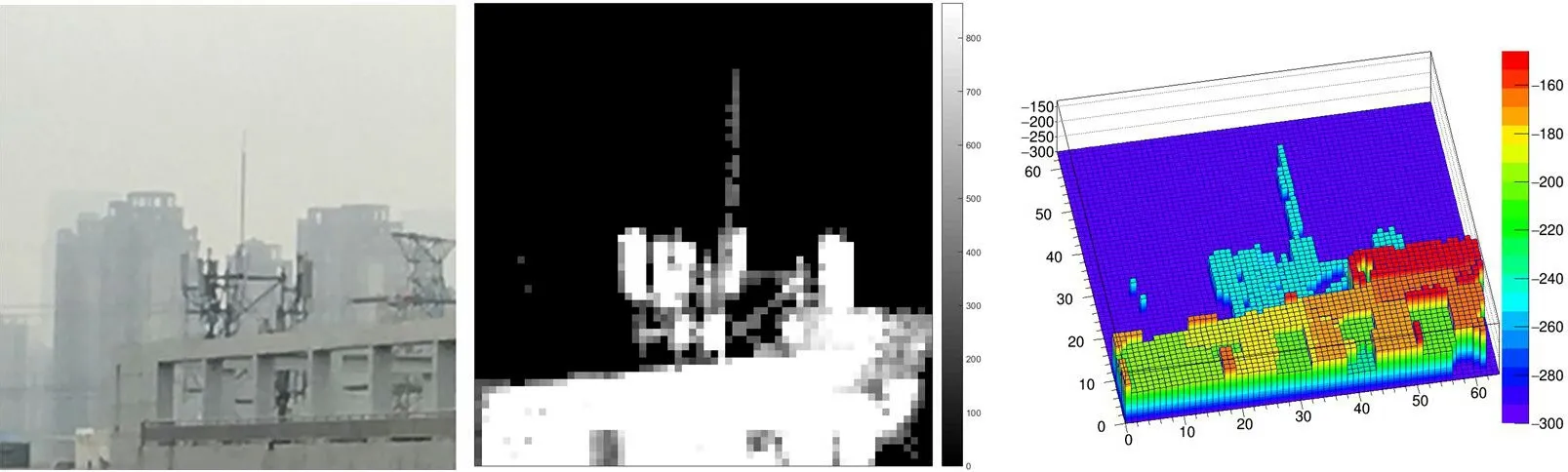
图2:300米外目标照片(左)、强度成像结果(中)、基于飞行时间距离成像结果(右)
激光光束在横截面上的光强分布为非均匀高斯分布,在光束中心光强较高,在光束边缘光强较低。直接将光束投影到视场上用于照明时,激光照明效率较低。为此,采用了非球面镜光束整形器,将光束由高斯分布整形为平顶分布,然后用于视场的照明。
面阵单光子探测器为64×64规模InGaAs盖革APD焦平面阵列。APD阵列前方安装了微透镜阵列,将光学填充因子提高到约60%。单个APD像元在1064nm波段的量子效率约20%,暗计数率20kHz。每个APD像元后端都集成了数字计时器,实现了2ns计时精度。APD阵列最大计数帧频为20kHz,通过CameraLink接口采集光子计数数据。在成像过程中,激光器每发射一个脉冲激光,同步触发APD阵列探测器,探测器经过固定延时后,开启门控来探测回波脉冲信号。
3 信号提取方法
单光子探测器实际记录的数据为光子飞行时间,经过多次累积可以得到光子飞行时间直方图,其中包含了信号光子、噪声光子和暗计数等数据。信号光子在直方图中为脉冲式分布,而噪声光子和暗计数为随机均匀分布,通过在时间域上的差别可以较大程度上去除噪声。
由于发射的激光脉冲为纳秒级别,宽度较窄,激光信号光子集中分布在直方图中相邻的几个区间内。其分布宽度主要取决于激光脉冲宽度、测量时间精度等因素。本实验装置中,激光脉冲宽度为500ps,测量时间精度为2ns。直方图时间区间宽度为探测器的时间分辨率(2ns),回波脉冲在直方图中可能跨越多个区间。为了确定信号所在的时间区间,按照如下公式,顺序累加多个相邻区间的光子计数:

式中,ni为第i个时间区间内的光子数目,f为累加k到k+N时间区间内的光子数目。为了尽量覆盖回波脉冲,选取N=5来计算f,将具有最大光子数目的相邻区间作为回波脉冲区间。
在视场没有目标的情况下,光子计数主要来自于背景光、暗计数噪声,上述方法仍然能够获得回波脉冲时间区间,但是由于噪声涨落引起的。为了解决这个问题,计算了每个时间区间的平均光子数作为阈值;如果f超过区间上平均光子数起伏的3倍,则认为其为信号区间;否则,认为区间中无回波脉冲。
4 成像结果
本实验装置对300m外目标的成像结果如图2所示。为了降低噪声的影响,在探测回波脉冲前,对探测器施加了1us时间延迟,然后开启门控时间2us进行探测。图2显示了基于20000个脉冲回波数据的目标强度图像与距离图像,图像分辨率与探测器像元规模一致,为64×64,空间分辨率为0.2m,成像视场为
12.8 m×12.8m。
5 结语
本文基于64×64规模的InGaAs盖革APD阵列与高峰值功率激光器,搭建了1064nm光子计数激光三维成像平台,进行了强度和距离成像;针对光子探测噪声来源复杂的问题,基于信号与噪声在时间分布上的差异,有效提取了激光回波信号,实现了室外300米外目标三维成像。
猜你喜欢
光子学报(2022年11期)2022-11-26
科学导报(2020年66期)2020-11-02
百科探秘·航空航天(2020年12期)2020-01-22
电子测试(2018年18期)2018-11-14
军民两用技术与产品(2016年3期)2016-03-26
中国医学装备(2015年10期)2015-12-29
湖南师范大学自然科学学报(2015年1期)2015-02-27
太空探索(2014年9期)2014-07-10
机械制造与自动化(2014年1期)2014-03-01
原子与分子物理学报(2014年4期)2014-02-28
