一类整数阶分数阶幸福模型的滑模同步
2019-09-16 03:29:34王东晓王战伟
安徽大学学报(自然科学版) 2019年5期
王东晓,王战伟
(郑州航空工业管理学院 数学学院,河南 郑州 450046)
科研工作者抽象出很多动力学模型,并从系统的各个方面加以研究,得到很多结果[1-8].文献[1]研究了爱情的分数阶动力模型;文献[2]对一个对称分数阶经济模型的混沌特征加以研究和分析;文献[3-4]研究了分数阶混沌系统和一类分数阶非线性混沌系统的同步问题;文献[5-7]研究了爱情的幸福模型,其中文献[5]基于特征值方法研究了幸福的动力学模型,文献[8]研究了受驱动非线性幸福模型的动力学解析问题.
20世纪50年代,前苏联学者提出变结构控制.变结构控制起源于继电器控制和 Bang-Bang 控制,它与常规控制的区别在于控制的不连续性.滑模控制(sliding mode control, 简称SMC)也叫变结构控制,本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性.滑模变结构控制的原理:根据系统所期望的动态特性来设计系统的切换超平面,通过滑动模态控制器使系统状态从超平面之外向切换超平面收束;系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统原点,这一沿切换超平面向原点滑动的过程称为滑模控制.文献[9]对分数阶磁悬浮球系统进行了滑膜控制;文献[10]基于滑膜控制对挠性航天器姿态跟踪及主动振动抑制加以研究;文献[11-12]分别研究了神经网络和一个新的分数阶混沌系统的滑模同步问题.另一方面,当遭遇一个外来事件的激励后,情绪会有多种响应表现,表现为忘乎所以歇斯底里(超混沌),或者原来不安的情绪突然安静下来.论文运用李雅普诺夫稳定性理论及分数阶微积分,采用滑模控制,分别研究了一类整数阶、分数阶的2,3维幸福模型的同步问题.
引理1Caputo型分数阶微分算子的Laplace变换为
其中:n-1≤p≤n,且当0≤p<1时,有

1 主要结果
Sprott等[5]研究罗密欧与朱丽叶彼此相爱的时间振荡关系,构造爱情R的动力学模型为
其中:β为阻尼衰减率,ω为自然谐振频率.

(1)
以系统(1)为驱动系统,考虑如下响应系统
(2)
其中:U(t)为控制器.定义误差为e1=y1-x1,e2=y2-x2.
(2)式减去(1)式得到误差系统为
(3)
定理1设计滑模函数s(t)=εe1+e2,ε>0,控制器U=(β-ε)e2+ω2e1-ηsign(s(t)),η>0,则系统(1),(2)滑模混沌同步.
证明设计滑模面s(t)=εe1+e2,当系统发生滑模运动时,需满足条件
(4)



其次,考虑2维分数阶幸福模型,有
(5)
响应系统为
(6)
定义误差为e1=y1-x1,e2=y2-x2,则误差系统为
(7)

(8)
取1-α分数阶导数


(9)
响应系统为
(10)
取误差变量为e1=y1-x1,e2=y2-x2,e3=y3-x3,得误差系统为
定理3设计滑模函数s(t)=εe1+e2+e3,ε>0.25,选取控制器
则系统(9),(10)是滑模同步的.
证明设计滑模函数s(t)=εe1+e2+e3,当系统发生滑膜运动时,需满足条件
代入
以下考虑分数阶3维幸福模型.驱动系统为
(11)
响应系统为
(12)
系统(12)减去(11),得到误差系统为
(13)

则系统(11),(12)是滑模同步的.
证明滑模函数

应用引理2,有



幸福模型对人们的心理治疗和处世方式可以起到积极作用.利用数学方法,构建幸福的动力学模型和分析,实现幸福模型的同步,可以提高整个社会的幸福指数.
2 数值仿真及结语

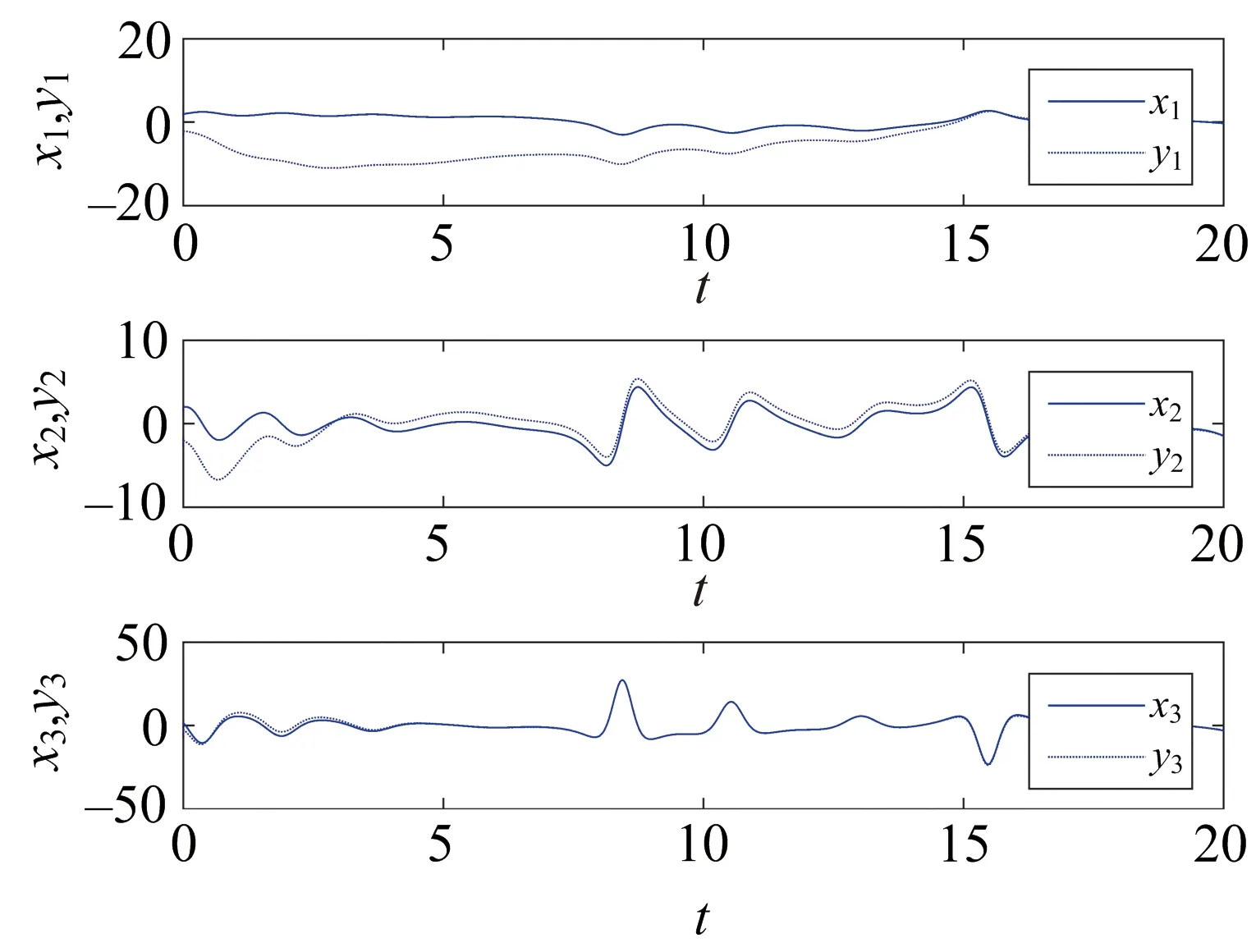
图1 系统(9),(10)的同步曲线
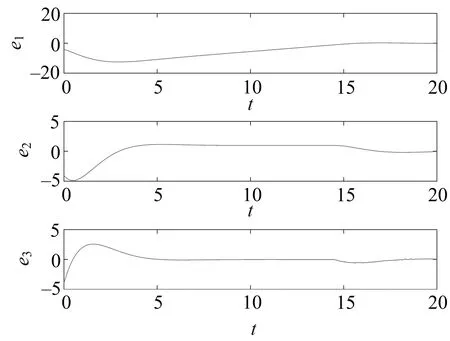
图2 系统(9),(10)的误差曲线
论文用滑模控制实现了一类幸福模型的控制,由于得到的是充分条件而非必要条件,故在数值仿真过程中,即使是更为简单的控制器同样可以实现系统的同步,所以,有更多的问题需要后续去研究.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17 06:26:42
数学年刊A辑(中文版)(2021年3期)2021-11-05 08:36:32
建材发展导向(2021年14期)2021-08-23 00:57:20
数学年刊A辑(中文版)(2021年2期)2021-07-17 08:37:58
数学物理学报(2019年1期)2019-03-21 05:26:12
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
中国组织化学与细胞化学杂志(2016年3期)2016-02-27 11:15:41
数学年刊A辑(中文版)(2015年1期)2015-10-30 01:55:44