
苹果装箱一体化装置的设计
2019-09-15 12:55黄可婧梁仙明刘宇李威武官仪陈红
湖北农业科学 2019年15期
黄可婧 梁仙明 刘宇 李威 武官仪 陈红

摘要:针对中国果园苹果人工装箱效率低、劳动强度大的问题,设计了一种智能装箱设备,实现采摘连续性、自动智能装箱等功能,在提高果实装箱效率的同时降低果实损伤率。该设备由垂直输送装置、升降装置、均布装置和检测装置组成。通过试验分析,确定了均布装置的结构参数和工作参数,即均布装置转速为40 r/min,均布装置距果面高度10 cm,均布类置叶片长度60 cm。对装箱设备关键部件进行设计,其中包括升降装置、均布和检测装置。通过SolidWorks对整机进行设计。控制部分采用8个红外避障传感器,水平分布在扇叶所在的上升模块上,当所在水平面上苹果填充的数量达到设定标准时,单片机输出信号,控制电机驱动模块,实现均布装置的自动提升,可满足箱满时均布装置与箱体相配合的要求。
关键词:苹果装箱装置;均布;装箱;单片机;红外避障传感器
中图分类号:S255.93 文獻标识码:A
文章编号:0439-8114(2019)15-0128-04
DOI:10.14088/j.cnki.issn0439-8114.2019.15.030 开放科学(资源服务)标识码(OSID):
Apple packaging and integrated device design
HUANG Ke-jing,LIANG Xian-ming,LIU Yu,LI Wei,WU Guan-yi,CHEN Hong
(College of Engineering,Huazhong Agricultural University,Wuhan 430070,China)
Abstract: In view of the low efficiency and high labor intensity of citrus apples in orchards in China, a smart packing equipment was designed to realize the functions of picking continuity and automatic intelligent packing, which can improve fruit harvesting efficiency and reduce fruit damage. rate. The device consists of a vertical conveyor, a lifting device, a uniform and a detection device. Through the experimental analysis, the structural parameters and working parameters of the uniform device were determined, that is, the speed of the uniform device was 40 r/min, the height of the uniform device was 10cm from the fruit surface, and the blade length was 60 cm. The design of the key components of the boxing equipment is described, including lifting devices, uniforms, and inspection and detection devices. Design the entire machine through SolidWorks. The control part adopts 8 infrared sensors, which are horizontally distributed on the rising module where the fan blade is located. When the number of apple filling on the horizontal plane reaches the set standard, the single chip outputs a signal to control the motor drive module to realize the automatic lifting of the uniform device. Meet the requirements of the uniform distribution device and the box when the box is full.
Key words: apple packing device; uniform cloth; packing; single chip microcomputer; infrared obstacle avoidance sensor
中国是苹果的重要原产地之一,苹果资源丰富,优良品种繁多,有悠久的栽培历史。苹果广受消费者的青睐,丰产稳产、经济效益高,对果农脱贫致富、农村经济发展起重大作用。但是现有技术中,苹果从采摘、收集到装箱各作业环节主要依靠人工完成,效率低,成本高,难以适应苹果市场的快速发展。研究一种在国内果园具有较强适应性的果实智能收集、装箱装置具有重要意义。
国外水果采摘多采用振动式收获机械、采摘机器人和大型果园采摘平台,采摘作业过程多为大中型联合作业,配套动力较高、价格昂贵,不适合大面积推广应用。一些发达国家试验了多种具有人工智能的采摘机器人,但由于采摘对象的复杂性和采摘环境的特殊性,目前市场上没有商业化的采摘机器人。国内水果采摘机器人的研究主要集中在果实识别、定位和采摘,对果实传送装箱过程的研究很少,传送装箱系统会对果实造成一定的机械损伤。秦楠等[1]研制的可伸缩式苹果采摘器结构简单、使用方便,但不适用于大面积的果园;钱文池等[2]研制的多功能蝶式苹果采摘器由采摘装置、角度调节装置、伸缩杆和水果收集装置等四部分组成,可以连续采摘;邵强等[3]研制的自走式柔性智能苹果采摘机能快速识别、精准采摘苹果,但由于树叶遮挡等问题,机器的识别率存在一定误差。针对上述问题,设计一种适用于现代标准化果园的智能装箱设备,以实现采摘连续性、自动收集、智能装箱多功能,提高果园的采收效率、降低农民劳动强度。
1 总体结构与工作原理
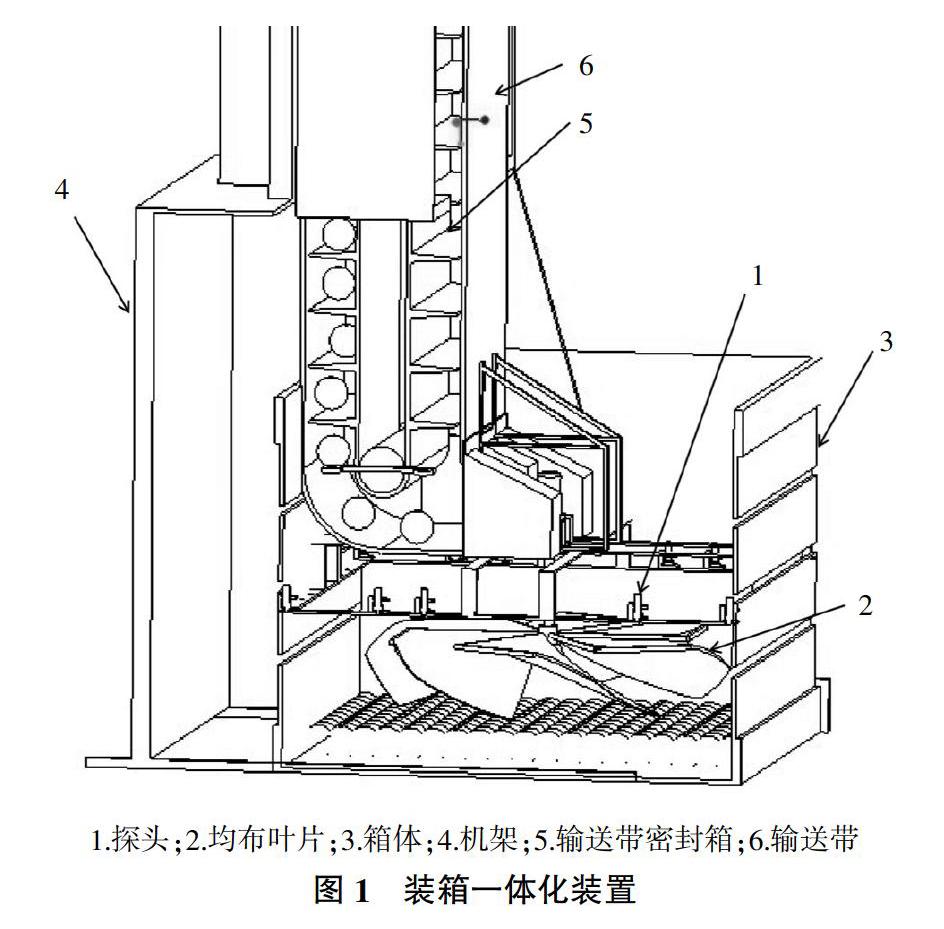
设计的苹果装箱一体化装置结构如图1所示,主要由果实收集装置、丝杠、机架、输送带密封箱、输送带、均布与检测装置、箱体等组成。
收集、装箱设备整体由垂直输送装置、均布装置、检测控制系统三部分组成。工作原理为苹果通过不同方式(水果采收机输送带、工厂输送带等)汇集到苹果收集装置,并通过斜面进入输送带,输送带叶片同输送带密封箱之间形成一密闭空间约束果实。输送到下端的果实通过均布叶片均匀分布在果箱中,当箱体内的一层苹果铺满时,装置将向上移动以利于下一层果实进入箱体中。探头的分布由试验确定。当箱体内铺满一层苹果时,探头将检测果面与探头之间的距离,当该距离达到设定值时,探头给控制装置相应信号。当信号探头数量达到设定值时,控制装置驱动丝杠,使得输送装置和探测装置上升。此时,下一层果实开始均布入箱,探头到果面距离超过设定值,装置不再上升。一次循环过程直到箱体装满苹果停止。
1.1 均布与检测装置
均布与检测装置为整机的关键部件,其作用为:将苹果均摊到箱中,尽量减少果实损伤率,并且检测果面与均布叶片间的距离,从而对垂直输送装置的升降进行控制。苹果均布装置不仅可以缓冲苹果下落时的冲击力,降低苹果的损坏率,还可以将苹果均匀地分布在果箱中的不同部位。随后进行试验,最终得到均布装置的相对最优工作参数,即均布装置转速40 r/min,均布装置距果面高度10 cm,均布装置叶片长60 cm。均布装置整体是由上端的步进电机驱动,均布叶片的材料采用的是防静电泡棉,泡棉具有弹性良好、重量轻、快速压敏固定、使用方便、弯曲自如、体积超薄、性能可靠等优点,并且泡棉与果皮之间的摩擦系数很小,能最大限度的减小均布过程中的果实损伤率。当均布装置满载时,即有12个苹果同时落在该均布叶片上。经计算,转矩TM=1.67 N·m。
1.2 升降装置
升降装置的主要作用是实现垂直输送装置和均布装置整体升降。随着果箱内果实的增加,通过升降装置来提升垂直输送装置和均布叶片,以使果實能一层一层的装入果箱。装置组成及其作用:丝杠通过滑块抬升整个装置,且丝杠滑台上下安装有限位开关,均布装置四周安装有8个红外避障传感器。在设备启动后,升降装置下降,带动垂直输送装置下移,滑块触碰到下限位开关时,装箱工作准备就绪,在采摘过程中,果实不断进入箱中,当红外避障传感器检测到均布装置与果面之间的距离达到设定值时,升降装置电机反转,垂直输送装置上升到一定高度,使果实能继续进入果箱。升降装置运行的速度设定为40 mm/s,经计算,TM=8.374 N·m。
2 控制系统设计
2.1 控制系统工作原理
根据果园实际生产需求,箱体为100 cm×100 cm×100 cm立方体,在高于均布叶片20 cm平面增设一个95 cm×95 cm的正方形框架,8个红外避障传感器(NPN型)间隔地分布在框架相对的两条边上,预先设定传感器的测定距离,从而检测未被扇叶遮挡的范围。当任何一个传感器被遮挡,传感器内部都会返回给单片机一个低频信号。当单片机判断反馈信号数量满足设定值时,则认为在这一水平面上苹果已填充满,从而判定垂直输送装置提升。根据设定的程序,给控制升降装置的电机相应的信号,电机发动驱动旋转丝杆带动均布叶片上升,达到自动控制的效果[4],整体控制系统流程如图2所示。
2.2 控制系统硬件设计
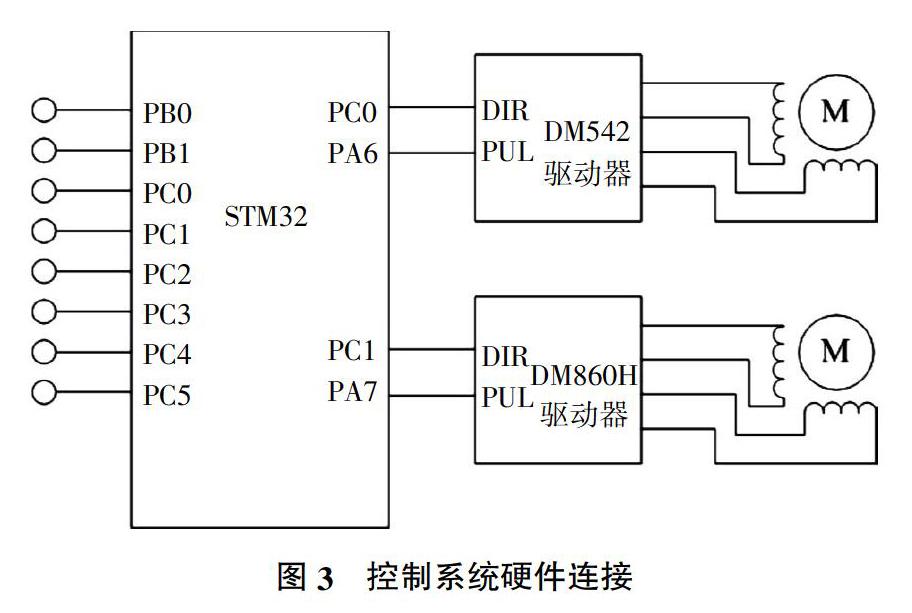
8个红外避障传感器与stm32单片机的ADC1的7-15号接口(即PB0、PB1、PC0、PC1、PC2、PC3、PC4、PC5)相连接且这8个红外避障传感器由单片机供给5 V电源。当这8个红外避障传感器在检测范围内被遮挡时会向对应端口发送低电频信号,单片机通过基于DAM循环模式的ADC通道连续转换采集功能统计这8个传感器低电频个数,当个数大于等于6时表示该层已装满,通过PC0和PA6、PC1和PA7这两组端口连接两个与不同步进电机相连的DM542驱动器。一组端口是给恒定PWM波驱动步进电机带动扇叶旋转;另一组输出PWM波驱动电机带动丝杆旋转[5],如图3所示。
2.3 具体模块及功能分析
2.3.1 输入信号模块 当8个红外避障传感器平均分布在与均布装置扇叶底端的同一水平面时,组成输入信号模块,即能较好地在不增加过多误判的基础上,同时满足经济性原则和预计设想的要求。
当每个传感器设定的检测距离为0.3 m左右时,就能较好地满足预计设想。每个传感器由单片机上或者外接直流电源供3.3 V电压,当前方有苹果挡住时,输出指示灯会点亮提示且信号输出端会通过导线连接输出一个电频信号给单片机检测。
经过对均布试验的观测与研究,为避免均布装置运行对传感器遮挡的情况,避开均布装置运行的区域,同时,为了避免出现四个角填充滞后的情况,选取两个传感器,针对其中相对的两个角,用以提高检测精度,从而提升判定精准度(图4)。
2.3.2 控制模块 利用stm32单片机ADC的8通道连续转换采集功能和DAM循环模式,将红外避障传感器信号端传过来的模拟数据循环传输到内存中,然后对8个通道数据进行实时判定,单片机通过给舵机驱动一个PWM波,分别控制两个舵机。一个是固定PWM波,驱动扇叶旋转的舵机;另一个是设定ADC模式存储数据作为判定,当在一段极短的时间内捕获到5个以上低电频信号时,判定满足条件跳入中断,运行给另一个带动丝杆旋转的舵机PWM波程序,驱使固定在丝杆上的扇叶均布装置上升,设定好时间和信号就可以使其上升至固定值。
2.3.3 动力输出模块 经过机械结构的设计参数分析,最终确定选用一个2.3 N·m小扭矩的步进电机和一个8.5 N·m大扭矩的步进电机作为该模块的主体,每个步进电机有对应的驱动器,直流电源对驱动器供电,从而驱动电机工作。给步进电机每个绕线组一个变化的电频信号(PWM波)就可以实现电机的正反转,信号变化的快慢决定电机的转速,但如果信号变化过快,转子无法同步,并且扭矩降低[6]。
小扭矩步进电机固定在扇叶上方,带动扇叶恒速旋转,当苹果下落时,经过均布叶片缓冲,均匀地落入箱体中。电机由24 V直流稳压电源供电,其转速由单片机输出给DM542步进电机驱动模块的PWM波,驱动模块上有将转速细分的开关,通过打开或关闭对应开关,可以达到调节转速的目的。经过试验分析,当调节转速为40 r/min时,苹果分布较为均匀,且损伤较小。大扭矩步进电机固定在丝杆轴线的正上方,由单片机根据条件判定,使信号对DM860H电机驱动模块进行控制,从而由丝杆旋转带动均布装置上升。经计算和试验得到,满足判定条件后,均布装置应至少在3 s内完成上升的距离,因此由丝杆和转速的关系,得出转速为40 r/min以内。
3 结论
设计了一种果实智能装箱设备,能显著提高果实采收效率,降低劳动强度和果实损伤率,针对苹果果园提出了果实智能收集、装箱设备的功能要求和设计参数,确定了装箱工艺。针对装箱工艺重点设计了均布装置,以苹果为试验材料,确定了均布装置合适的工作参数,即均布装置转速为40 r/min、均布装置距果面高度10 cm、均布装置叶片长度60 cm。确定果实收集、装箱设备的整体结构和工作原理,对整机的关键部件进行了设计,其中包括升降装置、均布和检测装置。通过红外避障传感器探测,实现果实的均匀低损伤装箱,以及箱内每层果实铺满时垂直输送装置的提升判断。
参考文献:
[1] 秦 楠,王林青.可伸缩式苹果采摘器的设计[J].机械工程与自动化,2019(3):112-113.
[2] 钱文池,张 俊,吴红静,等.多功能蝶式苹果采摘器的设计[J].机械研究与应用,2019,32(1):135-140.
[3] 邵 強,郭晓云,朱紫薇,等.自走式柔性智能苹果采摘机设计[J].佳木斯大学学报,2019,37(2):247-249.
[4] 丁友强,杨 丽,张东兴,等.玉米变量播种机单体驱动器的设计[J].农业工程学报,2019,35(11):1-9.
[5] 熊利荣,郑 伟,罗舒豪.基于触觉感知的家禽净膛机械手及其控制系统的设计[J].农业工程学报,2018,34(3):42-48.
[6] 陈立坡.混联自稳跟踪平台及控制系统设计与试验[J].农业工程学报,2018,34(1):22-27.
猜你喜欢
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
电子制作(2018年12期)2018-08-01
上海大中型电机(2017年3期)2017-11-13
电子制作(2017年19期)2017-02-02
设备管理与维修(2016年7期)2016-04-23
铁道科学与工程学报(2015年5期)2015-12-24
计算机工程(2015年8期)2015-07-03
河南科技(2015年2期)2015-02-27
