
基于主动变道策略的汽车紧急避障系统研究
2019-09-13 07:49段婷婷吕冬慧陈宽胡顺堂王毓
时代汽车 2019年12期
段婷婷 吕冬慧 陈宽 胡顺堂 王毓
天津中德应用技术大学 天津市 300350
近年来,社会经济的飞速发展极大地提高了国民购买能力,同时也促进了汽车产业的蓬勃发展。在提供便利性的同时也造成了交通拥堵等事故频频发生。从保证乘驾人身财产安全和降低交通事故发生率的角度出发,研究以预防为核心的先进车辆主动安全控制系统则是当下交通的迫切需求[1]。
汽车主动变道的研究属于自动驾驶ADAS的范畴,主要是汽车依靠先进的车载传感器获取前方道路、目标车辆及自车的状态信息,利用主动变道路径规划算法对状态信息进行分析处理,及时改变行车路径,以避免或减轻交通事故带来的安全问题[3]。目前存在的主动避障多是纵向避障策略,其主要通过制动来控制与前车的距离,而较少考虑主动转向变道的控制策略。因此在进行纵向避撞研究的同时,加入主动变道系统的研究对于未来交通而言是十分有意义的。
本文对汽车主动避障系统进行研究,通过变道轨迹规划策略对汽车变道轨迹进行规划,并且采用模型预测控制器提供跟踪控制策略,对于汽车行驶时安全性和稳定性的研究有很大的意义。
1 安全距离模型
对于整个汽车主动变道系统,系统若要实现整个主动变道过程的完成,需要规划出汽车应当行驶的路径,然后设计控制器对规划出的轨迹进行跟踪控制,进而实现整个主动变道系统的工作。
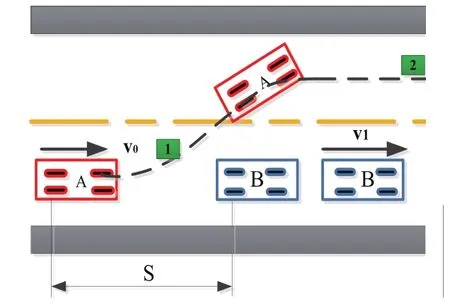
图1 变道轨迹规划
当雷达测得的两车间相对距离达到安全限定值时,主车主动变道系统指挥主车进行转向操作,确保两辆车不发生碰撞的最小距离称为最小安全距离S;采用主动变道的方法,汽车开始转向的时刻需要刚刚好,同时需要确定主车临界转向距离D。
(1)最小安全距离S
考虑到汽车行驶的安全性,汽车紧急制动时制动距离Sb,汽车在紧急制动完全停止时,与前方障碍物应该留有一定的距离S1。汽车进行变道之前应该预留的相对距离至少为:

研究表明,S1距离一般取2.5~3米;测得不同轿车的制动试验数据,利用最小二乘法拟合得到的车辆制动公式为:

因此,

(2)转向临界距离DS
如果汽车转向时,辆车车距较大,有可能会导致驾驶员出现操作失误的现象;如果汽车转向时两车的相对距离较短,则会出现紧急转向的情况,会使车辆出现侧翻或失稳现象,因此我们需要选取一个合适的转向临界安全距离[2]。

式中,vr为两车的相对速度;t为变道时间。
2 基于模型预测控制的路径跟踪
MPC即为模型预测控制,主要包含三个重要的组成部分,即为预测模型、滚动优化和反馈控制三个模块。主要作用原理是MPC测量信息并在线求解规定时间的开环优化问题,并将求解获得的控制序列的第一个元素来作用于被控对象[3]。在下一个采样时刻,重复上述过程,刷新优化问题并重新求解。该算法主要包括三个过程:预测系统未来动态、求解开环优化问题以及将优化解的第一个元素作用于系统[5]。
对于一个非线性系统,一般采用如下的离散模型:
式中: 表示为系统的状态转移函数,为 维状态变量, 为 维控制变量, 为状态变量约束, 为控制变量约束。
设定 为系统的一个稳定点,同时也是系统的控制目标,对于任意的时域N,考虑如下的优化目标函数 :




在下一个采样时刻,系统重新以新的采样时刻作为初始状态进行求解,同时将控制序列的第一个元素施加给受控对象,循环该步骤,直至整个控制过程完成。
3 仿真结果
为更好验证非线性MPC控制器对规划轨迹的跟踪效果,本文采用Carsim与Simulink联合仿真分析,针对低速和中速工况进行仿真和轨迹的跟踪效果。在分析过程中,主要对整车的横摆角速度和侧向加速度及实际跟踪轨迹对比的分析,仿真的变道轨迹跟踪图如图2所示。

图2 变道轨迹跟踪图

图3 低速工况横摆角速度分析对比
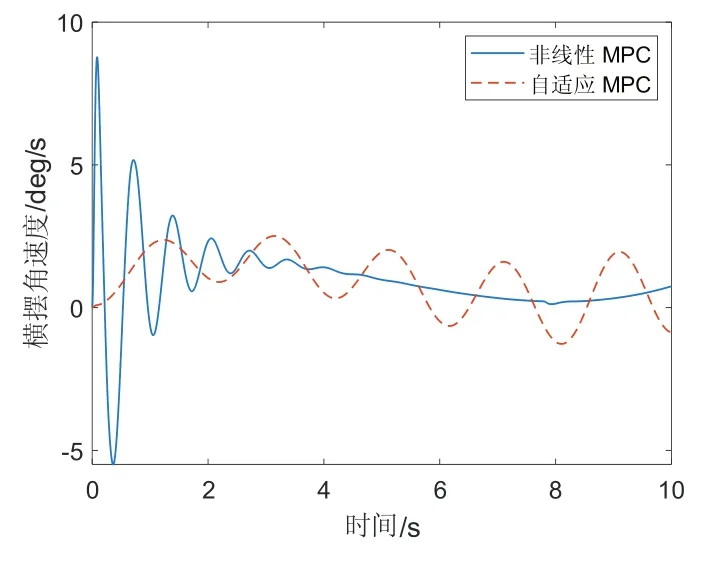
图4 中速工况横摆角速度分析对比
通过图3和图4分析可以得到,在30km/h低速和60km/h中速运行的情况下,汽车在进行轨迹跟踪过程中,自适应MPC控制器进行跟踪控制时横摆角速度波动范围较大,而非线性MPC控制器进行跟踪控制时横摆角速度趋于稳定,说明在中速跟踪时非线性MPC控制器的稳定性更好。
通过图5分析可以得到,在30km/h低速和60km/h中速运行的情况下,汽车在进行轨迹跟踪过程中,自适应MPC控制器进行跟踪控制时侧向加速度波动范围较大,而非线性MPC控制器进行跟踪控制时侧向加速度趋于稳定,说明在中速跟踪时非线性MPC控制器的稳定性更好。
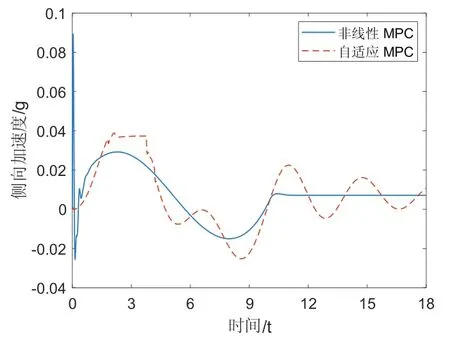
图5 低速工况侧向加速度分析对比

图6 中速工况侧向加速度分析对比
4 结论
本文基于汽车的主动变道策略,研究了基于安全距离和最小转向距离的汽车轨迹规划,提出了汽车在紧急避障的主动变道时的轨迹规划,并采用基于模型预测控制轨迹跟踪控制器对规划的轨迹进行跟踪控制,通过仿真分析对两种模型预测控制器的跟踪结果进行评价,结果显示,由非线性模型预测控制器进行的轨迹跟踪控制具有较好的控制效果。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
E动时尚·科学工程技术(2019年19期)2019-09-10
轻兵器(2019年6期)2019-06-21
网络空间安全(2019年8期)2019-03-18
科学与财富(2017年16期)2017-06-13
科技传播(2012年10期)2012-06-06
