
面向太阳能组件的新型日晷式太阳自动跟踪系统
2019-09-10 07:22郭鹏朱元琪黄晓雪
河南科技 2019年22期
郭鹏 朱元琪 黄晓雪


摘 要:基于HT66F70A单片机,采取四象限测光原理和传感器定位方式,设计了一套新型日晷式太阳定位跟踪系统。该系统优化了光伏太阳能组件的工作过程,运用HT66F70A单片机实现自动跟踪太阳位置,尽可能使太阳光垂直入射到光伏板上,以获得最大光伏发电利用率,从而提高光电转化率并降低光伏板投入成本。同时,结合风速测量功能,使系统具备抗环境干扰功能,提高了太阳能光电转化利用率,具有广泛的应用前景。
关键词:日晷;太阳定位跟踪系统;光伏组件;四象限测光;单片机
中图分类号:TK513.4 文献标识码:A 文章编号:1003-5168(2019)22-0034-03
A New Sundial Sun Tracking System for Solar Components
GUO Peng ZHU Yuanqi HUANG Xiaoxue
Abstract: Based on the Single Chip HT66F70A, using a Four Quadrant photometric principle, we designed a novel sundial mode solar positioning tracking system. This system could optimize the working process of PV Module. Through the Single Chip HT66F70A, it could automatically tracking the position of solar, with vertical incidence of solar light, optimizing the photon-to-current conversion efficiency, reduce power generation cost. At the same time, combined wind measurement function, the system was insensitive to environmental disturbance. This system had good prospects for application.
Keywords: sundial;sun tracking system;solar components;four quadrant photometry;MCU
隨着全球对环境、资源等问题的重视,对可再生资源的需求也越来越迫切,新能源的应用已然成为一股潮流,尤其是对太阳能、风能等的利用,已经成为广泛关注的话题[1-3]。
目前,太阳跟踪装置主要分为两大类,即机械系统和电控系统。当前,国内太阳跟踪器的研究方向偏向于对光电式太阳跟踪器的研究,尤其注重对机电一体化双轴太阳跟踪器的研究。但是,光电式太阳跟踪器易受天气影响,无法时刻跟踪太阳,使得太阳能转换效率较低[4,5]。由此,本文提出新型的日晷式太阳定位跟踪系统,以感知日晷代替感知光来提高太阳定位跟踪器对环境变化的适应能力[6-8]。该系统的硬件结构能削弱环境因素对信号的干扰,降低感应信号误差;而对应的单片机程序设计,能增强跟踪器对环境变化的响应能力,有效避免跟踪器误操作和不响应问题[9,10]。
本文设计的新型日晷式太阳定位跟踪系统是基于HT66F70A单片机控制,结合机电一体化技术的一套运动机构。其突破现行固定的跟踪系统,使搭载的光伏板实时跟踪太阳所在位置,获得垂直入射的太阳光,以获得最大光伏发电利用率。对于获取相同发电量的产品,在装备了本跟踪系统后,能减小使用光伏板的面积,从而大幅缩减制造成本。
1 系统总体设计
新型日晷式太阳定位跟踪系统主要由电源模块、HT66F70A单片机控制模块、太阳位置检测模块、运动跟踪模块、限位模块、昼夜检测模块和风向风速检测模块组成。系统通过各检测模块感知太阳位置,判断运动方向,并控制驱动电路,从而控制光伏发电系统转动,实现太阳光垂直入射到光伏板上,获得最大转换效率。
系统组成框图如图1所示。
2 系统硬件设计
2.1 电源模块
电源模块主要由太阳能控制器、开关与蓄电池组成,实现电源管理功能,为其他功能模块提供工作电压,提供5V和12V两种直流电。
2.2 单片机控制模块
HT66F70A单片机作为整个跟踪系统的核心部件,满足实时控制的要求。HT66F70A单片机是16位单片机,内部集成五个计时模组(Timer Module),提供时间测量、输入捕捉、比对吻合输出以及PWM与单脉冲输出等功能。同时,单片机接收限位、昼夜和风向风速等检测信号,智能排除环境干扰,避免机械卡死和误运动,并在风速超过一定限值时,自动调整光伏板至顺风状态,以确保系统自身结构不受损坏。
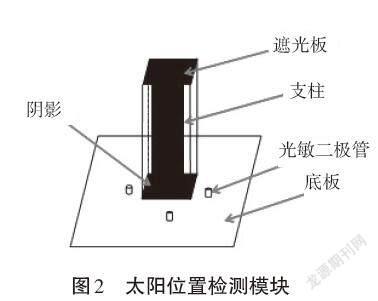
2.3 太阳位置检测模块
太阳位置检测模块利用四象限原理,在太阳光直射时,阴影不足以遮盖光敏电阻感光面,四象限光敏二极管保持一致,此时系统获得最大入射角和最大转换效率,运动跟踪模块静止;当太阳光斜射时,阴影会偏向一边,遮盖住某一象限的光敏电阻感光面,经过比较电路传给单片机,控制运动跟踪模块工作,跟踪太阳位置,使太阳光直射。
2.4 运动跟踪模块
太阳位置检测模块计算太阳位置后,通过单片机的输出引脚发生电平变化,此信号经过放大电路使舵机发生转动,从而带动光伏板转动,实现定位跟踪。
2.5 限位模块
限位模块安装于系统转动平台上,以限制转动角度在0°~180°,防止出现舵机卡死的现象。
2.6 昼夜检测模块
检测白天与黑夜,为单片机控制模块提供信号。本系统在黑夜内停止运动,防止误转动,以节省电能消耗。
2.7 风向风速检测模块
利用单片机的通用定时计数器,对风速脉冲进行定时和计数,通过计算单位时间内的脉冲数计算出风速。风向则是检测输入的风向格雷码,将格雷码转换成二进制码,通过查表的方式求出风向角度,最终确定风向。新型日晷式太阳定位跟踪系统的主要模块如图3所示。
3 系统软件设计
3.1 HT66F70A单片机外设程序
系统运用HT66F70A单片机的TIM、PWM、IO等外设,编程时先完成外设寄存器的基本配置,实现系统初始化。然后实现东西向舵机运动角度的控制;风速检测,当检测风速超过5级风速8m/s,需要恢复平衡位置;日出归东;实时跟踪等功能。主要程序分析如下。
3.1.1 舵机驱动程序。舵机转动的控制,需要通过IO口输出PWM波形,周期为20ms,脉宽范围为500~2 500μs,当旋转角度超过范围后,取极限值。东西向舵机驱动程序如下:
void driver_ew(long th) {
long i,j;
if(th<=tmin_ew) //取极限值
th=tmin_ew;
if(th>=tmax_ew)
th=tmax_ew;
j=th/10;
pout_ew = 1;
for(i=0;i<j;i++)//控制脉宽
GCC_NOP();
pout_ew = 0;
GCC_DELAY(38500);}
南北向舵机驱动程序与东西向类似,不再重述。
3.1.2 运动方向程序。根据四象测光原理,由对立向的光敏二极管状态,判断太阳光入射是否偏向,从而控制转台旋转,东西向旋转程序如下:
if(!(pin_1 && pin_3)){
GCC_DELAY(20000);
if((pin_1==0)&&(pin_3==1)){
tew = tew-10;
if(tew<tmin_ew)
tew=tmin_ew;
driver_ew(tew); }
if((pin_1==1)&&(pin_3==0)){
tew = tew+10;
if(tew>tmax_ew)
tew=tmax_ew;
driver_ew(tew); }}
南北向旋转程序与东西向类似,不再重述。
3.1.3 风速检测功能。风速传感器输出模拟量,需要经模数转换后判断。若检测风速超过5级风速8m/s,需恢复平衡位置,由传感器输出特性(风速与输出电压关系)W=V/5×45可得对应电压约0.89V,故取16次ADC数据和为0x2d00,程序如下:
if(asss>0x2d00){
driver_sn(1500);
fwind=1;}
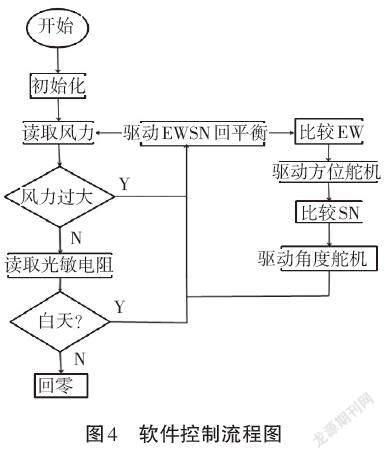
3.2 软件控制流程
新型日晷式太阳定位跟踪系统实现实时跟踪,并使系统具备抗环境干扰功能的控制流程图如图4所示。
4 结论
本文设计的新型日晷式太阳定位跟踪系统主要由电源模块、HT66F70A单片机控制模块、太阳位置检测模块、运动跟踪模块、限位模块、昼夜检测模块和风向风速检测模块组成。其通过四象限比较原理判断太阳方位,驱动舵机转动,达到实时定位跟踪的目的。本设计硬件结构和控制程序设计简单,容易操作,价格低廉,具有跟踪和自我保护功能,性能稳定可靠,具有较高的应用价值。
参考文献:
[1]田行,刘立群,葛竹,等.大型阵列式太陽能热发电定日镜跟踪系统设计[J].太原科技大学报,2016(1):27-31.
[2]Ricardo Guerrero-Lemus,José Manuel Martínez-Duart. Concentrated Solar Power[J].Lecture Notes in Energy,2012(3):135-151.
[3]施秉旭.基于单片机的太阳能电池板自动跟踪系统的设计[J].电子技术与软件工程,2016(3):262.
[4]任松林.主动式太阳跟踪及驱动系统研究与设计[D].重庆:重庆大学,2008.
[5]王志伟.西班牙采用联合投资形式开发太阳能电站[J].中国建设动态(阳光能源),2006(2):92.
[6]张顺心,宋开峰,范顺成.基于并联球面机构的太阳跟踪装置研究[J].河北工业大学学报,2003(6):44-48.
[7]吕文华,贺晓雷,于贺军,等.全自动太阳跟踪器的研究与应用[J].光学精密工程,2008(12):2544-2550.
[8]饶鹏,孙胜利,叶虎勇.两维程控太阳跟踪器控制系统的研制[J].控制工程,2004(6):542-545.
[9]陈维,李戬洪.太阳能利用中的跟踪控制方式的研究[J].能源工程,2003(3):18-21.
[10]刘鉴民.太阳能利用:原理·技术·工程[M].北京:电子工业出版社,2010.
猜你喜欢
百科知识(2021年19期)2021-10-23
百科知识(2021年17期)2021-09-18
百科知识(2021年15期)2021-08-12
七彩语文·国际版(2020年4期)2020-04-27
数学大王·低年级(2019年12期)2019-08-14
科学与财富(2019年21期)2019-08-06
文艺生活·下旬刊(2017年3期)2017-04-13
中国机械(2014年23期)2014-10-21
电子世界(2004年4期)2004-07-26
电子世界(2004年4期)2004-07-26
