
多机械臂系统的自适应神经网络同步控制
2019-09-10 07:22:44孟凡丰赵林于金鹏
青岛大学学报(工程技术版) 2019年3期
关键词:神经网络
孟凡丰 赵林 于金鹏

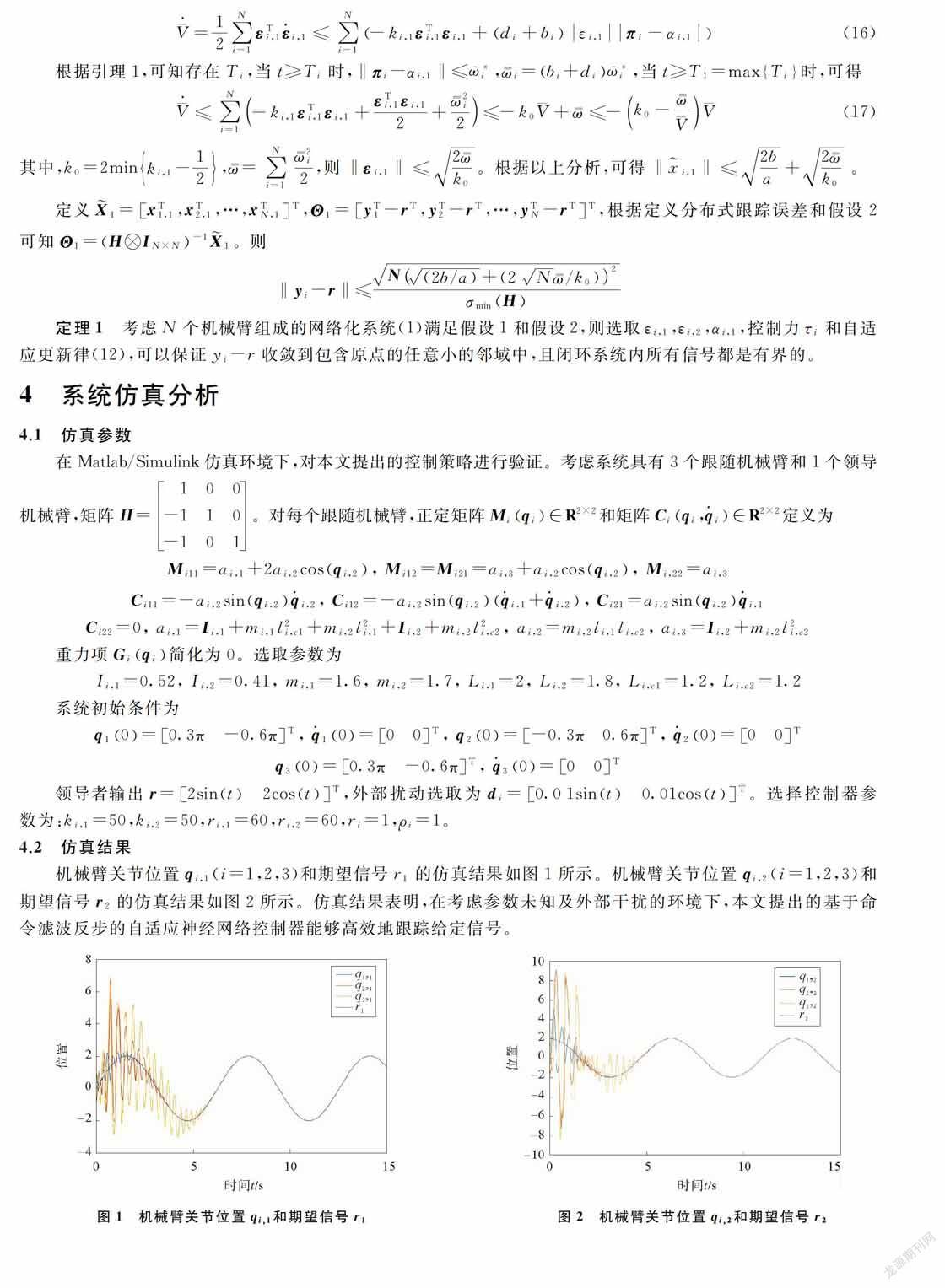
摘要: 针对多个机械臂组成的网络化系统,本文基于命令滤波反步和自适应神经网络,对网络化机械臂系统的同步控制问题进行研究。建立了系統数学模型,对命令滤波控制器进行设计,运用命令滤波反步法,消除传统分布式反步控制的虚拟信号求导问题,并利用误差补偿信号,消除命令滤波产生的误差。同时,利用神经网络逼近系统的不确定非线性项,通过设计分布式控制器和自适应更新律,保证关节位置同步跟踪误差收敛到任意小的邻域内。为验证本文所提出的控制策略的准确性,在Matlab/Simulink仿真环境下进行仿真分析。仿真结果表明,在具有系统参数不确定性和外部扰动的情况下,该分布式控制方法可使网络化机械臂系统实现良好的位置同步跟踪。该研究对网络化机械臂系统的同步控制提供了新的思路,具有一定的实际应用价值。
关键词: 网络化机械臂系统; 反步法; 命令滤波; 神经网络
中图分类号: TP273+.2; TM242 文献标识码: A
猜你喜欢
装备制造技术(2020年11期)2021-01-26 00:39:08
电子制作(2019年19期)2019-11-23 08:42:00
电子制作(2019年12期)2019-07-16 08:45:28
中国生物医学工程学报(2019年5期)2019-07-16 07:56:56
北京航空航天大学学报(2017年12期)2017-04-23 08:31:45
重型机械(2016年1期)2016-03-01 03:42:04
大连工业大学学报(2015年4期)2015-12-11 04:06:52
海军航空大学学报(2015年4期)2015-02-27 13:45:47
电测与仪表(2014年20期)2014-04-04 11:58:02
电测与仪表(2014年2期)2014-04-04 09:04:04
