
一种舞蹈机器人控制方案的设计
2019-09-10 07:22张培彦罗帅
河南科技 2019年31期
关键词:人机交互
张培彦 罗帅




摘 要:舞蹈机器人具有娱乐性和观赏性,市场前景广阔。该控制方案设计在传统舞蹈机器人的基础上进行了创新,加上语音识别、传感器、人机交互等模块,配上相应的末端抓取机构,使舞蹈机器人可以利用辅助舞蹈器械完成更为复杂的动作。
关键词:舞蹈机器人;示教-再现;人机交互;声音识别
中图分类号:TP242.6 文献标识码:A 文章编号:1003-5168(2019)31-0026-03
The Design of a Dance Robot Control Scheme
ZHANG PeiYan LUO Shuai
(College of Mechanical and Electrical Engineering, Zhengzhou Tourism College,Zhengzhou Henan 451464)
Abstract: The dance robot is entertaining and ornamental, and has a broad market prospect. The control scheme is designed to be innovative on the basis of traditional dance robots, adding speech recognition, sensors, human-computer interaction and other modules, coupled with corresponding end grabbing mechanisms, so that dance robots can use auxiliary dance equipment to complete more complex action.
Keywords: dance robot;teaching-reproduction;human-computer interaction;voice recognition
舞蹈机器人作为一种娱乐性、观赏性、互动性机器人,具有很大的研究价值和市场开发价值。舞蹈机器人的制作涉及机械、电子、自控、通信、传感、人工智能、机器人学、精密机构和仿生材料等多个领域[1]。舞蹈机器人的动作设计、夹持的辅助器械、对音乐节奏的契合程度、人机互动的灵敏度等对整体舞蹈效果都至关重要。本文设计的舞蹈机器人在机械设计、控制方案、音乐节奏识别、人机交互等方面进行了创新,可以实现语音交互、自动选择舞蹈器械、舞蹈动作与音乐节奏自动匹配等功能。
1 方案的总体设计
本文设计的舞蹈机器人由机械模块、语音识别模块、传感器模块、电源模块等组成[2]。
当舞蹈机器人接到语音指令后,通过语音识别模块识别执行的信号,机器人开始执行动作,自动抓取舞蹈器械,当传感器检测到舞蹈器械时,将信号传到机器人控制器,机器人控制器产生控制信号,使末端执行器动作,接下来根据音乐节奏执行编好的舞蹈动作。整体方案如图1所示。
2 机械设计
为了实现舞蹈机器人舞蹈动作的多样化,手臂的末端执行机构要实现对舞蹈器械进行顺利抓取,如刀、剑、扇、棍等,在进行这部分机械设计时,重点考虑以下几方面:①抓取对象的大小、质量、长短等;②多种抓取对象之间的转换;③抓取对象是否有明确的位置和位相、正反方向;④抓取对象运动的速度变化[3]。
本次设计的主要工作对象就是刀和剑,舞蹈过程中要保证夹持牢固,动作顺滑,设计过程如下:①选择合适的夹持方式;②计算夹持力;③设计夹爪;④传感器安装位置。
根据以上分析及设计步骤,在三维设计软件平台上完成末端执行器部分设计与运动仿真,如图2所示。
3 控制方案设计
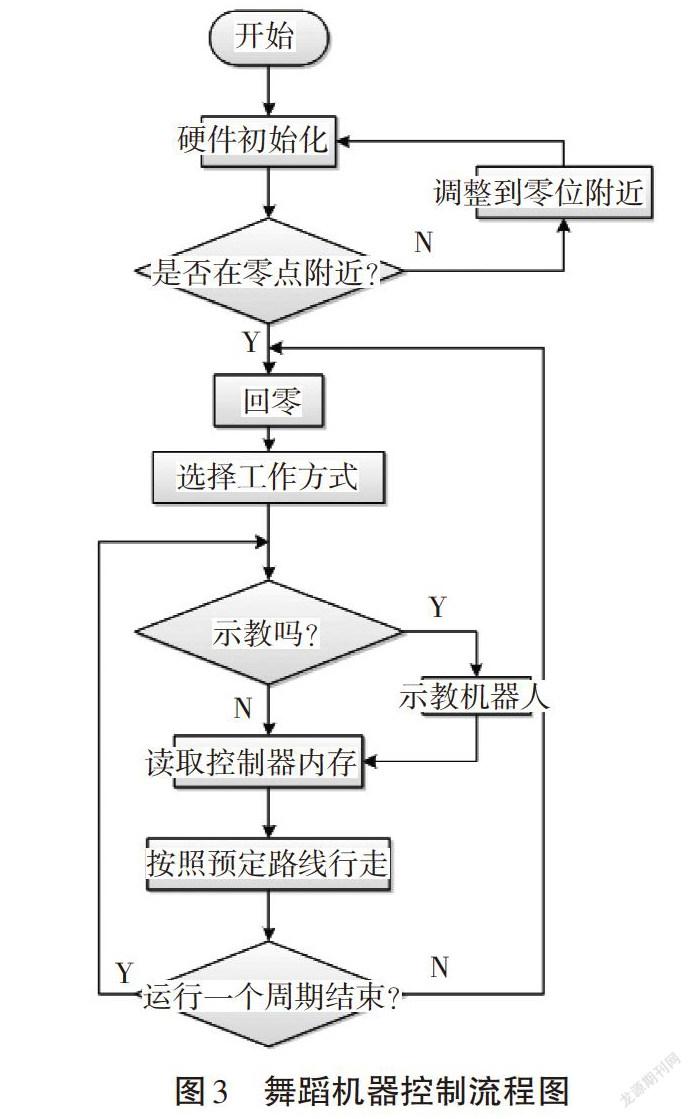
舞蹈机器人的舞蹈动作是一连串有节奏、有快慢、四肢协调的连贯动作,机器人的形态主要靠关节位置来实现,因此,让机器人处于多个不同关节状态,就能形成一个舞蹈动作,而且舞蹈种类繁多,在实际应用中也可以让使用者自己设计舞蹈动作,进一步提高舞蹈机器人的娱乐性和观赏性[4]。在设计控制方案时,不但要考虑安全稳定可靠,而且要考虑易学习、易操作、易修改等功能。针对以上控制要求,采用最经典、易学习操作的示教-再现法,重点是语音识别和音乐与舞蹈相配合的人机交互上。控制流程如图3所示。
首先,要确认舞蹈机器人各关节是否在机械零点处,确保四肢时刻能运行到程序指定的位置上;然后选择四肢的工作方式,选择示教-再现功能,读取控制器中的程序数据,按照编制好的程序数据驱动四肢完成舞蹈动作;最后选择程序运行方式,实现整个舞蹈过程[5]。
4 人机交互功能的实现
舞蹈机器人的舞蹈动作选择是能根据人的语言指令进行程序选择和舞蹈动作的,通过语音识别模块,识别人的身份和声音指令,舞蹈机器人根据指令作出相应动作。基于声卡的工作原理,采用声卡搭建数据采集系统,从而采集外部的人的声音。根据人的语音波形中反映人生理和行为特征等一些独特信息的参数,从而自动识别说话者身份的技术,通过分析人的声音,并建立分析模型,再用计算机对模型和输入的语音进行配对,根据配对结果辨认说话人。基于LabVIEW开发环境实现人机交互的主程序流程如图4所示。
5 语音识别方案设计与实现
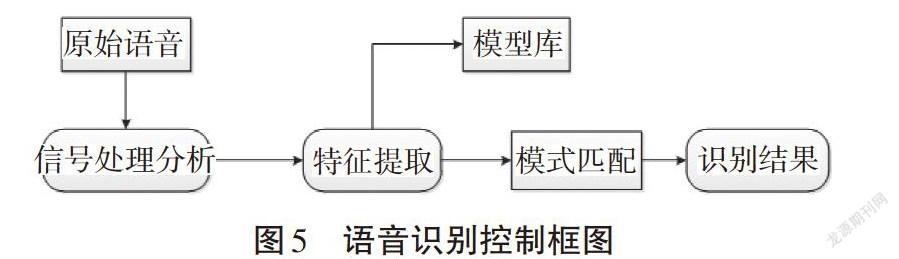
语音识别的作用是将人的语言中的词汇转化成计算机或其他控制器可读的输入,例如,按键、二进制或者字符序列等。语音识别系统都是由3个模块组成的,分别是参考模型库、声音特征提取及模式匹配[6],基本框图如图5所示。
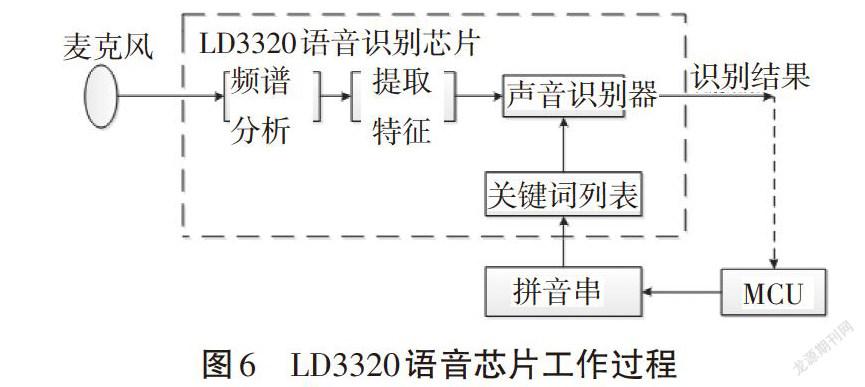
舞蹈机器人通过麦克风等拾音设备,将人的原始声音信号转换为电信号,接下来语音识别系统对信号进行处理,通过特殊算法提取出可以表现人语音特点的特征参数,用来区分不同人的语音信号,然后将该语音信号与参考语音库中的语音特征参数进行匹配,经过比对后将最佳结果作为识别结果,以此作为控制信号进行后续操作。本舞蹈机器人利用LD3320语音芯片,大大简化语音处理的技术步骤,从而使语音识别的功能得以模块化处理。LD3320芯片是一款非特定人语音识别芯片,其所提供的语音识别技术是基于关键词语列表的识别技术,即ASR技术[7],当识别到人的语音信号中有关键词信息时,其就可以给出识别结果,再将结果传给后续的处理器。工作过程如图6所示。
主控制器采用STM32,结合语音识别芯片LD3320共同实现既定功能[8]。当用户发出指令信息后,LD3320模块将处理过的声音信息传送到主控制器,经由处理器处理后,将命令数据传送给计算机,通过计算机的再分配处理进行后续控制。
6 方案整体测试
舞蹈机器人的整体结构如图7所示。本方案搭建完毕后,经过反复测试,语音识别及控制功能正常,系统运行稳定,可以达到预期效果。
7 结语
本文探讨了一种舞蹈机器人控制方案的设计思路。运用模块化的方法对舞蹈机器人系统中的各个部分进行详细介绍,重点在人机交互、语音识别、末端执行器设计等方面进行创新。按照系统分析设计的一般规律,从预想的设计效果到给出实现方案,拓展了舞蹈机器人的功能。
参考文献:
[1]郑睿,廖胜凯.冰上芭蕾舞蹈机器人的实现[J].电子世界2004(7):37-40.
[2]曹文祥,冯雪梅.工业机器人研究现状及发展趋势[J].机械制造,2011(2):41-43.
[3]马江.六自由度机械臂控制系统设计与运动学仿真[D].北京:北京工业大学,2009.
[4]张爱红,张秋菊.机器人示教编程方法[J].组合机床与自动化加工技术,2003(4):49-51.
[5]翟敬梅,董鹏飞,张铁.基于视觉引导的工业机器人定位抓取系统设计[J].机械设计与研究,2014(5):45-49.
[6]祝賀.一种音乐驱动的机器人舞蹈系统及其计算实现[D].厦门:厦门大学,2017.
[7]陈睿,罗文宽,王硕,等.仿人形舞蹈机器人的设计与实现[J].产业与科技论坛,2017(7):42-44.
[8]熊芳.双足舞蹈机器人稳定性研究[D].兰州:兰州理工大学,2012.
猜你喜欢
科技创新导报(2016年23期)2016-12-23
电脑知识与技术(2016年26期)2016-11-24
计算机教育(2016年7期)2016-11-10
电脑知识与技术(2016年17期)2016-07-23
科教导刊·电子版(2016年17期)2016-07-16
电脑知识与技术(2016年7期)2016-05-19
电脑知识与技术(2016年7期)2016-05-19
计算技术与自动化(2015年4期)2016-03-25
心理技术与应用(2015年11期)2015-12-25
物联网技术(2015年11期)2015-11-26
