四旋翼飞行器的飞行姿态控制研究与实现
2019-09-10 20:16卢耀翔张加斯陈思佳
科学导报·学术 2019年39期
卢耀翔 张加斯 陈思佳
摘 要:四旋翼飞行器是一种多旋翼无人机,能够垂直起降,自由悬停,在军事和民用方面具有广泛的应用前景。论文采用动力学模型来进行四旋翼飞行器飞行姿态的描述。主要运动状态有偏航运动,俯仰运动,滚转运动和悬停。在MATLAB/simulink的环境下建立动力学模型并进行仿真。采用PID控制对以上姿态进行控制。
关键词:四旋翼飞行器;动力学模型;MATLAB/simulink
1.前 言
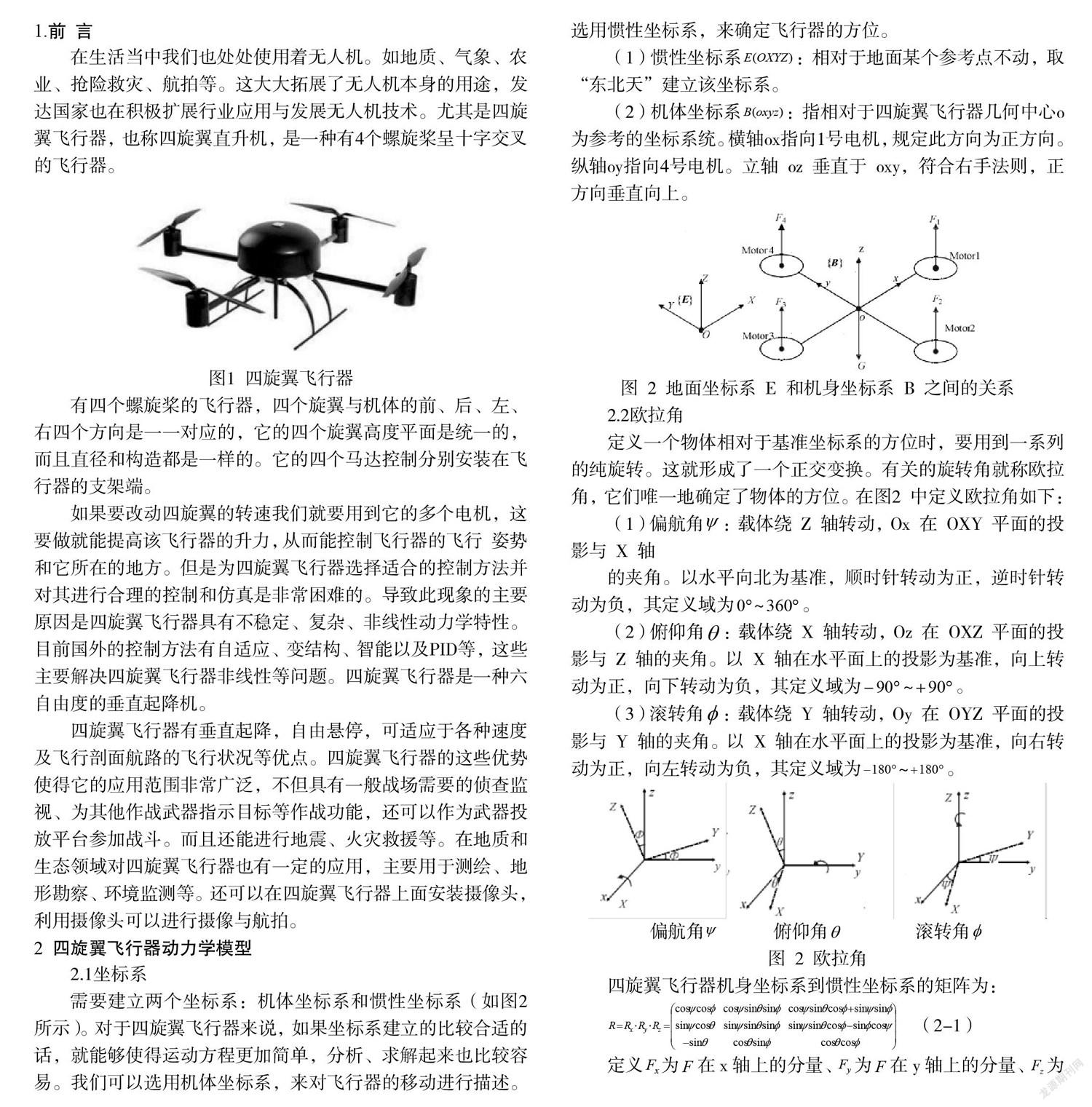
在生活当中我们也处处使用着无人机。如地质、气象、农业、抢险救灾、航拍等。这大大拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。尤其是四旋翼飞行器,也称四旋翼直升机,是一种有4个螺旋桨呈十字交叉的飞行器。
有四个螺旋桨的飞行器,四个旋翼与机体的前、后、左、右四个方向是一一对应的,它的四个旋翼高度平面是统一的,而且直径和构造都是一样的。它的四个马达控制分别安装在飞行器的支架端。
如果要改动四旋翼的转速我們就要用到它的多个电机,这要做就能提高该飞行器的升力,从而能控制飞行器的飞行 姿势和它所在的地方。但是为四旋翼飞行器选择适合的控制方法并对其进行合理的控制和仿真是非常困难的。导致此现象的主要原因是四旋翼飞行器具有不稳定、复杂、非线性动力学特性。目前国外的控制方法有自适应、变结构、智能以及PID等,这些主要解决四旋翼飞行器非线性等问题。四旋翼飞行器是一种六自由度的垂直起降机。
四旋翼飞行器有垂直起降,自由悬停,可适应于各种速度及飞行剖面航路的飞行状况等优点。四旋翼飞行器的这些优势使得它的应用范围非常广泛,不但具有一般战场需要的侦查监视、为其他作战武器指示目标等作战功能,还可以作为武器投放平台参加战斗。而且还能进行地震、火灾救援等。在地质和生态领域对四旋翼飞行器也有一定的应用,主要用于测绘、地形勘察、环境监测等。还可以在四旋翼飞行器上面安装摄像头,利用摄像头可以进行摄像与航拍。
2 四旋翼飞行器动力学模型
2.1坐标系
需要建立两个坐标系:机体坐标系和惯性坐标系(如图2所示)。对于四旋翼飞行器来说,如果坐标系建立的比较合适的话,就能够使得运动方程更加简单,分析、求解起来也比较容易。我们可以选用机体坐标系,来对飞行器的移动进行描述。选用惯性坐标系,来确定飞行器的方位。
2.2欧拉角
定义一个物体相对于基准坐标系的方位时,要用到一系列的纯旋转。这就形成了一个正交变换。有关的旋转角就称欧拉角,它们唯一地确定了物体的方位。在图2 中定义欧拉角如下:
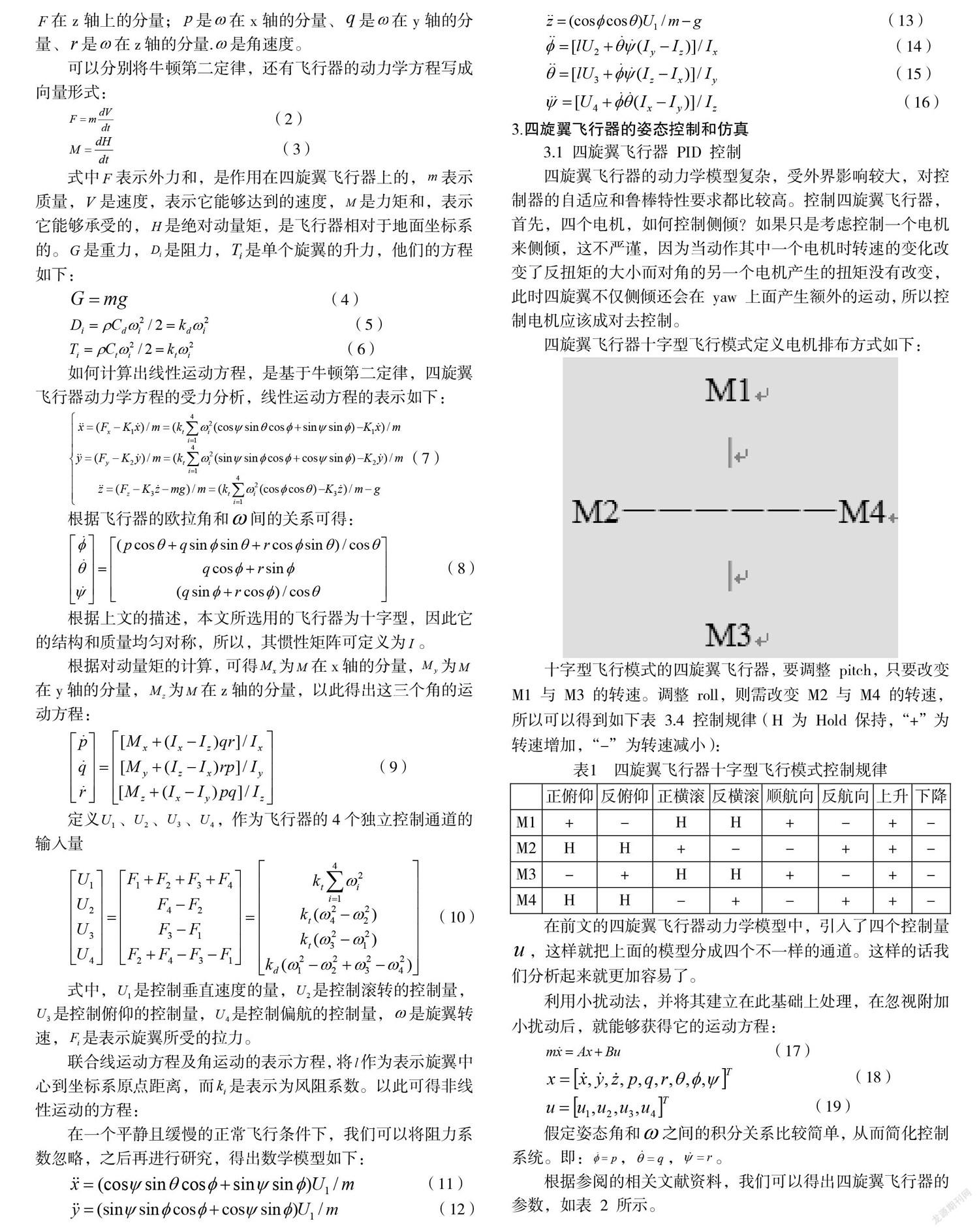
3.1 四旋翼飞行器 PID 控制
四旋翼飞行器的动力学模型复杂,受外界影响较大,对控制器的自适应和鲁棒特性要求都比较高。控制四旋翼飞行器,首先,四个电机,如何控制侧倾?如果只是考虑控制一个电机来侧倾,这不严谨,因为当动作其中一个电机时转速的变化改变了反扭矩的大小而对角的另一个电机产生的扭矩没有改变,此时四旋翼不仅侧倾还会在 yaw 上面产生额外的运动,所以控制电机应该成对去控制。
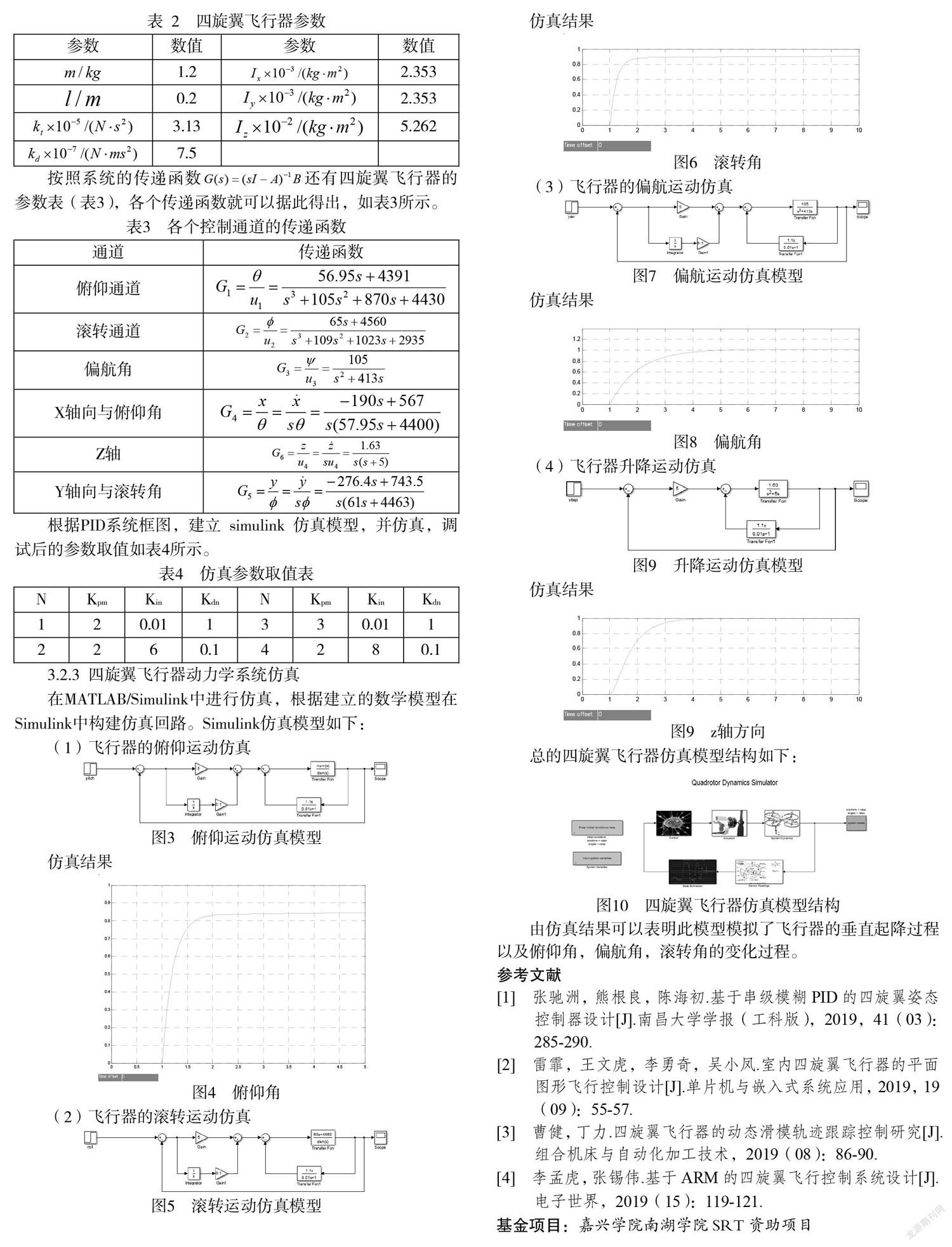
由仿真结果可以表明此模型模拟了飞行器的垂直起降过程以及俯仰角,偏航角,滚转角的变化过程。
参考文献
[1] 张驰洲,熊根良,陈海初.基于串级模糊PID的四旋翼姿态控制器设计[J].南昌大学学报(工科版),2019,41(03):285-290.
[2] 雷霏,王文虎,李勇奇,吴小凤.室内四旋翼飞行器的平面图形飞行控制设计[J].单片机与嵌入式系统应用,2019,19(09):55-57.
[3] 曹健,丁力.四旋翼飞行器的动态滑模轨迹跟踪控制研究[J].组合机床与自动化加工技术,2019(08):86-90.
[4] 李孟虎,张锡伟.基于ARM的四旋翼飞行控制系统设计[J].电子世界,2019(15):119-121.
基金项目:嘉兴学院南湖学院SRT资助项目