
工业缝纫机挑线机构的运动学研究
2019-09-10 07:22:44邱卫明潘建国徐仙国
现代纺织技术 2019年4期
邱卫明 潘建国 徐仙国
摘 要:挑线机构对缝制速度和精度的影响很大,直接影响着缝制的质量与缝纫机的优良,因此急需解决机构的动态特性及轨迹优化问题。通过对连杆挑线机构进行数学建模,参数化计算,以及仿真分析,得到了连杆挑线机构的轨迹形状,并以此分析了缝纫机挑线轨迹形状对缝制性能的影响。通过直接修改连杆长度、铰接点位置来实时、快速、精确控制曲线变化趋势、范围,为机构的设计、优化、评价提供理论参考依据,保证设计的可行性,最后通过仿真分析了四连杆挑线机构的末点的轨迹、位移和速度,为行业的研究人员提供了优化缝纫线迹的方法。
关键词:缝纫机;挑线机构;轨迹分析;连杆机构;仿真分析
中圖分类号:TS941.51;TH112
文献标志码:A
文章编号:1009-265X(2019)04-0095-04
Kinematic Research on Thread Take-up Mechanism of Industrial Sewing Machine
QIU Weiming1,2, PAN Jianguo2, XU Xianguo2
(1.Taizhou Radio & Television University, Taizhou 318000, China; 2.JACK Sewing Machine Co., Ltd., Taizhou 318000, China)
Abstract:The thread take-up mechanism has an important influence on the sewing speed and precision, which directly affects the sewing quality and the performance of sewing machine. Therefore, it is urgent to solve the dynamic characteristics of the mechanism and the trajectory optimization problem. In this paper, through mathematical modeling, parametric calculation and simulation analysis of the thread take-up mechanism, the trajectory shape of the mechanism was obtained, and the influence of trajectory shape on the sewing performance was analyzed. The variation trend and range of the curve were controlled in real time, quickly and accurately by directly modifying the length of the link and the position of the hinged point. This study provides a theoretical reference for the design, optimization and evaluation of the mechanism so as to ensure the design feasibility. Finally, the trajectory, displacement and velocity of the end point of the four-link take-up mechanism were analyzed by simulation. This study provides a method of optimizing sewing stitch for researchers in the industry.
Key words:sewing machine; thread take-up mechanism; trajectory analysis; linkage mechanism; simulation analysis
挑线机构在整个缝制过程中起着非常重要的作用,挑线机构的好坏直接影响着缝制的质量与缝纫机的优良。目前挑线机构主要有凸轮和四连杆机构,由于四连杆机构磨损小、噪音低、寿命长、转速高等优点[1],在高速缝制过程中被广泛的应用。挑线机构与穿针机构、送料机构、旋梭机构有一定的运动关系,完成机针所需缝线和每个线迹所需的线量。所以,挑线机构必须以优质的运动轨迹来实现所需线量的提供。目前对挑线机构运动特性的研究主要通过图解法、解析法和试验法,但计算精度不高。本文分析了连杆式挑线机构的原理,推导了末端点坐标和不同时刻点的坐标与构件的角度、并对其参数进行计算,得到了挑线末端的坐标轨迹形状,最后通过仿真分析了四连杆挑线机构的末点的轨迹、位移和速度。
1 挑线机构
1.1 挑线机构运动学特征与计算
挑线机构在线迹形成过程中交替提供和收回适量的线,并使面线和底线在缝料中间抽紧。以杰克缝纫机股份有限公司的单针电脑平缝机A4为例,其挑线机构总体是一个四连杆机构。目前大部分平缝机都采用连杆式挑线机构,该结构由美国胜家公司发明,与凸轮式挑线机构相比,连杆式挑线机构的主要特点是摩擦、磨损小,结构简单,寿命长,运转时机器的噪声低,尤其适用于高转速工作[2],所以目前几乎所有的工业高速平缝机都采用连杆式挑线机构。
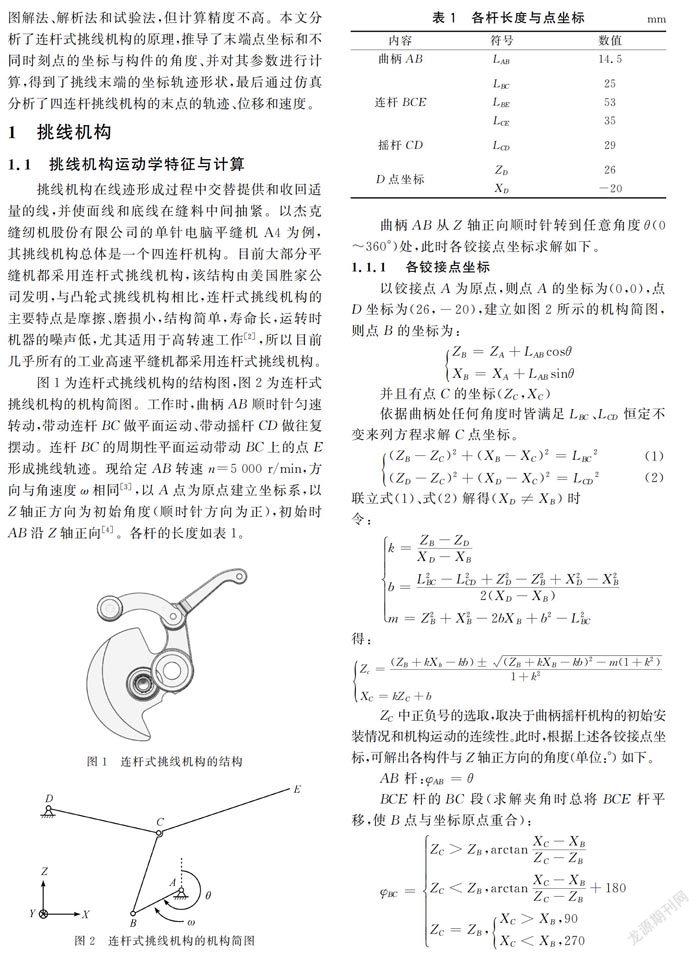
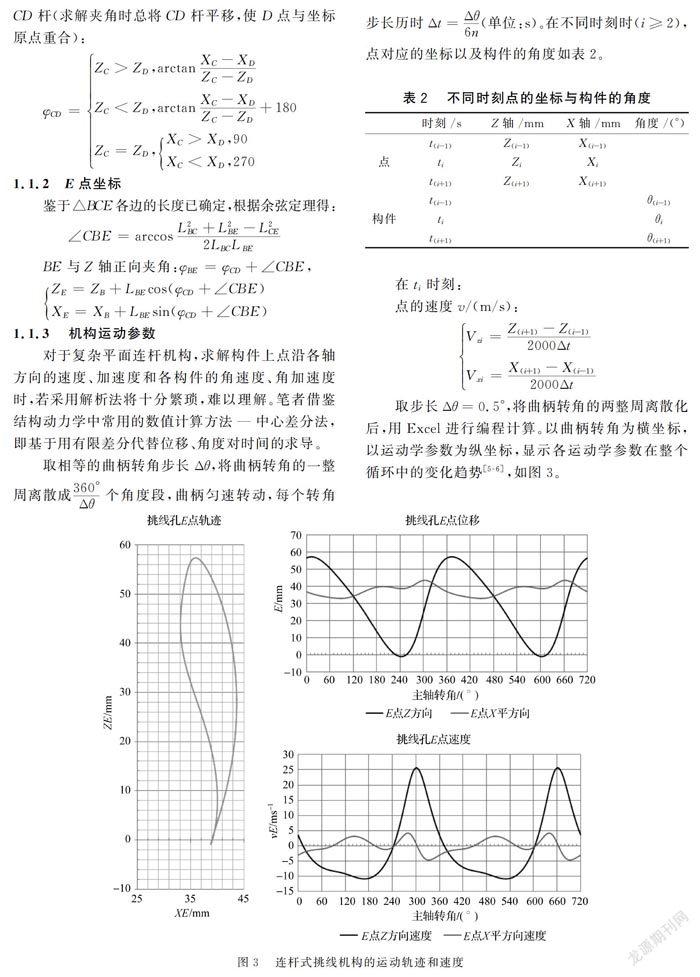
图1为连杆式挑线机构的结构图,图2为连杆式挑线机构的机构简图。工作时,曲柄AB顺时针匀速转动,带动连杆BC做平面运动、带动摇杆CD做往复摆动。连杆BC的周期性平面运动带动BC上的点E形成挑线轨迹。现给定AB转速n=5 000 r/min,方向与角速度ω相同[3],以A点为原点建立坐标系,以Z轴正方向为初始角度(顺时针方向为正),初始时AB沿Z轴正向[4]。各杆的长度如表1。
曲柄AB从Z轴正向顺时针转到任意角度θ(0~360°)处,此时各铰接点坐标求解如下。
1.1.1 各铰接点坐标
以铰接点A为原点,则点A的坐标为(0,0),点D坐标为(26,-20),建立如图2所示的机构简图,则点B的坐标为:
ZB=ZA+LABcosθ
XB=XA+LABsinθ
并且有点C的坐标(ZC,XC)
依据曲柄处任何角度时皆满足LBC、LCD恒定不变来列方程求解C点坐标。
(ZB-ZC)2+(XB-XC)2=LBC2
(ZD-ZC)2+(XD-XC)2=LCD2 (1) (2)
联立式(1)、式(2)解得(XD≠XB)时
令:
k=ZB-ZDXD-XB
b=L2BC-L2CD+Z2D-Z2B+X2D-X2B2(XD-XB)
m=Z2B+X2B-2bXB+b2-L2BC
得:
Zc=(ZB+kXb-kb)±(ZB+kXB-kb)2-m(1+k2)1+k2
XC=kZC+b
ZC中正負号的选取,取决于曲柄摇杆机构的初始安装情况和机构运动的连续性。此时,根据上述各铰接点坐标,可解出各构件与Z轴正方向的角度(单位:°)如下。
AB杆:φAB=θ
BCE杆的BC段(求解夹角时总将BCE杆平移,使B点与坐标原点重合):
φBC=ZC>ZB,arctanXC-XBZC-ZB
ZC<ZB,arctanXC-XBZC-ZB+180
ZC=ZB,XC>XB,90 XC<XB,270
CD杆(求解夹角时总将CD杆平移,使D点与坐标原点重合):
φCD=ZC>ZD,arctanXC-XDZC-ZD
ZC<ZD,arctanXC-XDZC-ZD+180
ZC=ZD,XC>XD,90 XC<XD,270
1.1.2 E点坐标
鉴于△BCE各边的长度已确定,根据余弦定理得:
∠CBE=arccosL2BC+L2BE-L2CE2LBCLBE
BE与Z轴正向夹角:φBE=φCD+∠CBE,
ZE=ZB+LBEcos(φCD+∠CBE)
XE=XB+LBEsin(φCD+∠CBE)
1.1.3 机构运动参数
对于复杂平面连杆机构,求解构件上点沿各轴方向的速度、加速度和各构件的角速度、角加速度时,若采用解析法将十分繁琐,难以理解。笔者借鉴结构动力学中常用的数值计算方法—中心差分法,即基于用有限差分代替位移、角度对时间的求导。
取相等的曲柄转角步长Δθ,将曲柄转角的一整周离散成360°Δθ个角度段,曲柄匀速转动,每个转角 步长历时Δt=Δθ6n(单位:s)。在不同时刻时(i≥2),点对应的坐标以及构件的角度如表2。
取步长Δθ=0.5°,将曲柄转角的两整周离散化后,用Excel进行编程计算。以曲柄转角为横坐标,以运动学参数为纵坐标,显示各运动学参数在整个循环中的变化趋势[5-6],如图3。
挑线轨迹大致呈“柳叶状”,挑线孔E点的运动轨迹需要根据实际缝纫机的供线和收线线量及不同时间段挑线速度和连杆BC受力要求来设计。而“柳叶状”轨迹保证了挑线杆能够迅速地放线收线,一方面能满足缝纫机关键时段的挑线、供线量和相应的速度要求,另一方面,挑线杆快速摆动,会使缝纫线的张力瞬时增大,是引起张力变化的主因。通过分析各曲线变化范围、快慢等信息来综合评定机构是否满足设计需求。同时可直接改变程序中控制参数的值,实现自动、快速更改曲线变化范围和快慢,直至满足使用要求,提高设计精度和效率[7]。
1.2 挑线机构多种变化
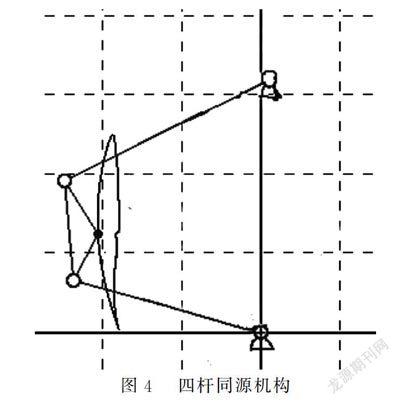
为了实现相同挑线轨迹,不必拘泥于上述单独一种连杆式结构。不同缝纫机内部结构不同,机构和结构布局形式经常受到整机内部空间的限制,可在不同内部空间采取相应的机构布局形式。如图4所示,四连杆机构亦可实现相同挑线功能[8],只是各连杆的长度有所不同,同时原动件不再作匀速整周转动,而改作往复摆动。
2 挑线机构的后续发展方向
挑线机构作为缝纫机最为重要的组成机构之一,经过多年的开发和研究,可通过不同的机构进行设计实现柳叶状结构挑线,从而对应放线和收线过程。
然而缝纫机的发展需求需要扩大缝纫范围,如中厚料要能做很大一部分厚料服装,并且同时要具备做部分薄料服装,因而对于挑线机构挑线轨迹的设计、挑线量的调节非常重要。上文1.1.2中提到,挑线机构作用点E的轨迹方程为:
ZE=ZB+LBEcos(φCD+∠CBE)(3)
XE=XB+LBEsin(φCD+∠CBE)(4)
从该方程可知,杆长的误差会对点E的轨迹带来较大的影响。因此在实际生产中,一方面要提升挑线轨迹理论实际的准确性,另一方面也要提升对杆长制造的精度要求,使实际更符合理论。由于杆长误差的必然存在,因此有必要设计一种通过简单的调节便能改变挑线量,如杰克缝纫机股份有限公司单针电脑平缝机A4的偏心挑线杆销的旋转从而改变摇杆CD的长度,进而实现调节挑线量。
因此,挑线机构的发展会逐步走向步进电机驱动的方向,通过步进电机和机构的组合运用,对步进电机进行编程,实现不同的摆动范围和摆动速度使得挑线量、挑线速度根据不同的挑线位置和面料进行自动调节,快速实现各种工况下的最佳缝纫线迹形式[9]。
3 结 语
本文分析了连杆式挑线机构的原理,推导了末端点坐标和不同时刻点的坐标与构件的角度。采用有限元分析方法将曲柄AB的一个循环周期均匀离散,然后进行参数化计算,通过直接修改连杆长度、铰接点位置来实时、快速、精确控制曲线变化趋势、范围,为机构的设计、优化、评价提供理论参考依据,保证设计的可行性,最后通过仿真分析了四连杆挑线机构的末点的轨迹、位移和速度。
参考文献:
[1] 邹慧君,雷杰,杜如虚,等.现代缝纫机原理与设计[M].北京:机械工业出版社,2015.
[2] 彭国勋,陈满儒.高速平缝机挑线机构动力学研究[J].陕西科技大学学报,1985(2):4-21,59.
[3] NB.加尔巴鲁克,魏思(译).锁式线迹缝纫机主要机构的设计与计算[M].上海:全国缝纫机工业科技情报站,1981.
[4] 张侃曼,马晓建,郭金柱,等.高速工业缝纫机动力学仿真与分析[J].轻工机械,2010,28(2):17-21.
[5] 张顺琦,秦现生,邓瑞君,等.组件化的装配生产线快速设计[J].中国机械工程,2010,21(21):2584-2589.
[6] 张莉,冯定忠,李创,等.基于运动轨迹误差分析的送料性能评估[J].纺织学报,2012,33(9):143-147.
[7] 邹慧君,田永利,张清,等.缝纫机创新设计的基本理论与方法[J].机械设计与研究,2002,18(3):56-58.
[8] 李瑞琴,邹慧君.现代机构的创新设计理论与方法研究[J].机械科学与技术,2003,22(1):83-85.
[9] 孙桓,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2007.
猜你喜欢
湘潮(上半月)(2023年3期)2023-06-14 05:34:32
荷城文艺(2022年3期)2022-05-30 10:48:04
趣味(语文)(2018年8期)2018-11-15 08:53:00
少年博览·小学低年级(2017年8期)2017-09-29 17:37:39
科学与财富(2016年18期)2016-12-22 17:50:59
科技创新与应用(2016年33期)2016-12-17 12:31:48
中小企业管理与科技·下旬刊(2016年10期)2016-11-18 20:11:04
中小企业管理与科技·上旬刊(2016年10期)2016-11-15 10:03:03
中国科技博览(2016年22期)2016-11-01 13:48:02
科技视界(2016年15期)2016-06-30 12:57:06
