基于射频识别技术的智能引导运输车设计
2019-09-10 18:25:50徐立坤柳晨阳李瑞霞
赤峰学院学报·自然科学版 2019年4期
关键词:物流业
徐立坤 柳晨阳 李瑞霞

摘要:随着物流业的不断发展,现代仓库物流越来越趋于智能化,智能引导运输车——AGV的出现,加速了现代仓库管理自动化的进程.AGV的使用可以让运输车在无人驾驶的情况下自动避开障碍物,自动将货物运送至指定地点.但现有的AGV技术装配使用了电磁或者光电等作为自动引导装置,使得运输车只能够沿着规定的轨道行驶,机动性能不强.为了解决这一问题,让运输车在仓库中更加自由的规划路线,提高物流效率,现将射频识别技术应用在仓库地板下,使得运输车在仓库内实现自主定位以及自主规划路径的能力.
关键词:物流业;智能引导运输车;射频识别技术
中图分类号:TP23;TP391.4 文献标识码:A 文章编号:1673-260X(2019)04-0104-04
0 引言
智能引导运输车的英文缩写为AGV(Automated Guided Vehicle),根据我国国家标准《物流术语中》对AGV的定义:装有自动引导装置的,能够沿这既定路线行驶的,能在运输车上编程的,安装有刹车装置的、安全保护装置的以及各种货物搬运载功能的运输车辆[1].但现有的AGV技术装配使用了电磁或者光电等作为自动引导装置,使得运输车只能够沿着规定的轨道行驶,机动性能不强.例如现有的AGV小车工作的路线上需要预先铺设有磁条,车载控制系统通过磁传感器接受到的信号控制AGV小车沿着预先铺设的磁条路线行驶[2].这种使用磁导航引导的运输车,只能在既定的磁轨道上行驶,而不能自由的规划路径[3].为了解决这一问题,能让运输车在仓库中更加自由的规划路线,提高物流效率,现将射频识别技术应用在仓库地板下,使得运输车在仓库内实现自主定位以及自主规划路径的能力.随着电子技术的不断发展,多种新型的室内定位技术得到广泛的研究和应用,其中包括蓝牙定位、Wi-Fi定位、UWB超宽带定位技术等.研究自动化的仓库内的室内定位技术,可以使得运输车在仓库内更加自由的规划线路,对提高仓库内运输作业小车的工作效率有大大帮助.
1 射频识别定位系统
1.1 射频识别定位系统工作原理
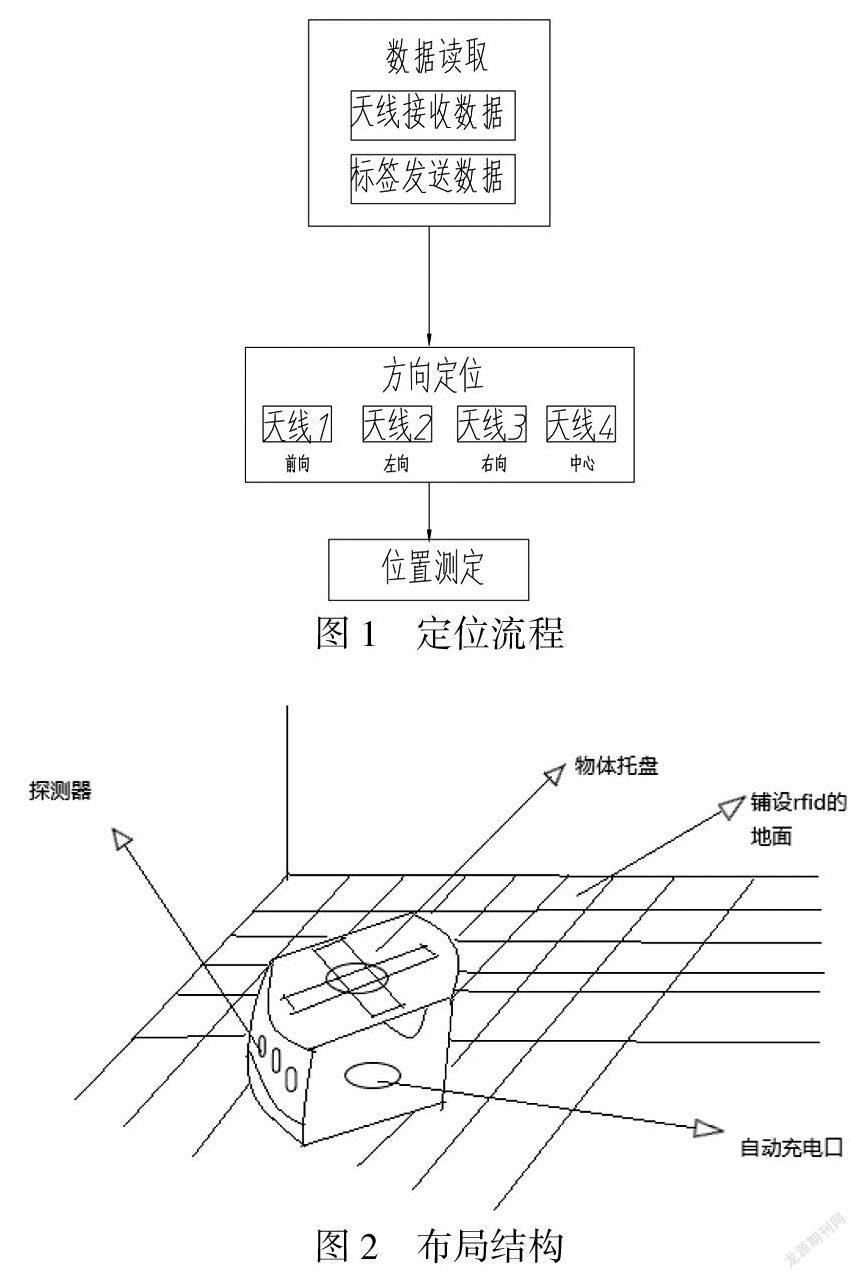
射频定位系统由方向定位器、接收天线、射频识别标签等组成.接收天线通过发射一定频率的射频信号,到射频识别标签进入接收天线接收区域是将产生感应电流,此时射频识别标签获得能量,射频识别标签将自身的位置编码信息发射出去,由接收天线接收并传送到解码器进行相关的信号处理[4].处理器依据编码即可匹配到当前的位置信息,以完成定位工作.
1.2 射频识别定位系统简介
由于射频识别是非接触性质的识别,所以不会带来误差的干扰.射频识别定位系统结构如图1所示.射频识别标签布局如图2所示.
射频识别定位系统的优点是精度高、抗干扰能力强、成本较低.其缺点是精度由标签密度决定,若想获得高精度定位,标签铺设就得更加密集;由于标签铺设在地板下面,后期维护较为耗时,维护成本较高等.随着日后的应用,其软件算法部分可以弥补部分的不足,代码将会不断优化更新,整套系统也将运行的越来越成熟可靠,维护成本也将进一步降低.
2 智能引导运输车总体结构
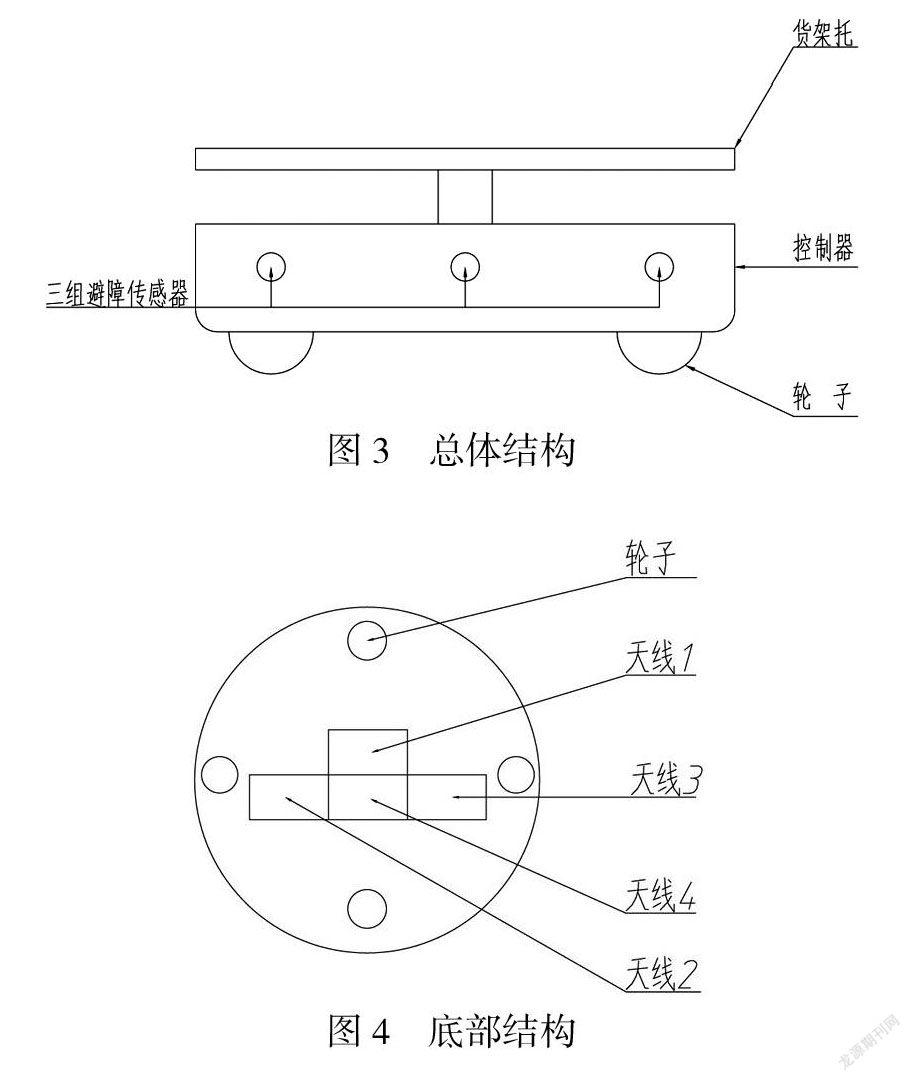
智能引导运输车的总体结构如图3所示,底部结构如图4所示,其主要部分由货架托、天线组、电池组、电机、轮子、避障传感器、控制器等构成.
本运输车采用四轮设计,四轮均可以独立控制,以实现前进、转向、后退等操作.天线组采用四天线设计.天线1用来定位前方位置,天线2用来定位左方位置,天线3用来定位右方位置,天线4用来定位中心位置,采用四天线设计可大大降低错误率,提高定位精度.
运输车主要用来搬运货架,货架托能够升起以抬升货架,整套设备使用电机驱动,电池组提供能源保障.货架托不用时可以缩回运输车内部,由于运输车高度低,可以进去货架下面,到达货架下下面时,货架托升起,托起货架,运输车托着货架移动,起到搬运的效果.
运输车直接和后台服务器相连,由后台服务器统一规划,统一发送路径指令.移动、搬运等操作都可以认为干预,增强了运输车的机动性能.
3 智能引导运输车软件系统设计
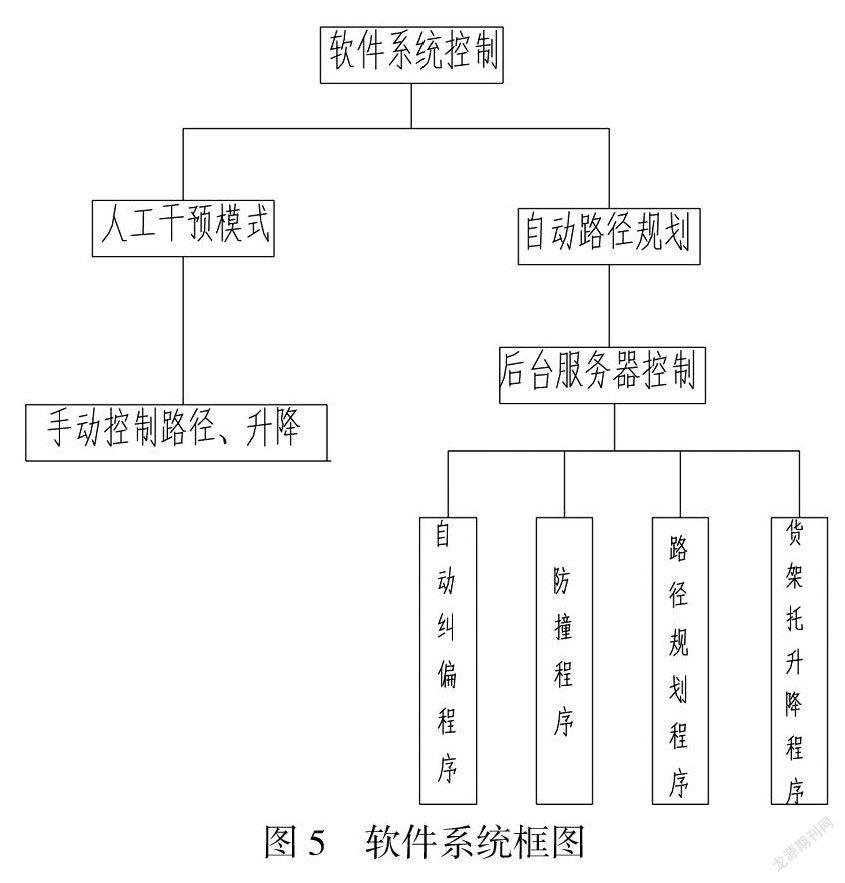
本套智能引导运输车系统具有两种控制方式,一种是根据标签定位的自动路径规划控制方式;另一种为人工干预的手动路径规划控制方式.人工干预模式下,操作员只需使用遥控器或者后台服务器远程遥控运输车.操作员可以手动控制运输车前进、后退、转向、控制货架托的上升、下降等操作.人工干预模式下不需要编程操作,只需要电路设计.
自动路径规划模式下,运输车负责收集标签位置信息,判断工作状态.运输车将收集到的位置信息传输至后台服务器,后台服务器统一规划路径,可防止相撞事故发生.自动路径规划模式下需要编写算法,包括自动纠偏程序、货架托升降程序、防撞程序、自动路径规划程序等.
软件系统如图5所示.
3.1 自动纠偏程序设计
自动纠偏程序设计流程是当运输车开机时,根据天线4所采集到的中心位置定位当前所处的位置信息.运输车将中心位置上传至服务器,報告自己所处的位置.当AGV开机后,控制系统实时检测标签的位置信息,通过四组天线探测的标签状态分析,判断当前运输车是否处于工作区域和判断姿态是否正确,之后自行配对路径.具体方法是,若四组天线均接收到了标签的位置信息,则判断没有偏离工作区域,并且姿态正确;若四组天线只有一个或两个接收到了标签的位置信息,则判断可能偏离工作区域或姿态错误,此时,运输车在原地旋转直到四组天线均接收到了标签的位置信息,若旋转一周后仍不能完全匹配上标签则向服务器发送告警信息,由操作员人工确认[5].刚开机时有两种工作状态,一是就位状态(当日首次开机),二是工作状态(临时断电重启).就位状态:当日首次开机,运输车将自己的位置旋转正,服务器向运输车规划返回工位路径,运输车通过天线1、天线2、天线3确定自己的方向信息,顺着路径返回工位.工作状态:当遇到突发事件,如发生碰撞、失去与服务器连接、定位失败等,运输车需要断电重启,开机后运输车首先将自己的位置旋转正,之后服务器会让运输车继续完成未完成的工作,服务器向运输车规划目标货架路径,运输车通过天线1、天线2、天线3确定自己的方向信息,顺着路径到达目标货架,完成规定任务.
3.2 防碰撞程序
运输车在工作或行驶的过程中,服务器规划的路径可能会出现障碍物例如掉落的货物或突发的动态障碍物如操作员的走动等,这就要求AGV需要具备一定的障碍物感知能力以实现防碰撞和障碍物规避,主动向服务器发送请求,立即规划出一条规避线路,此防碰撞程序优先级较高,在人工干预模式下也自动运行[6].
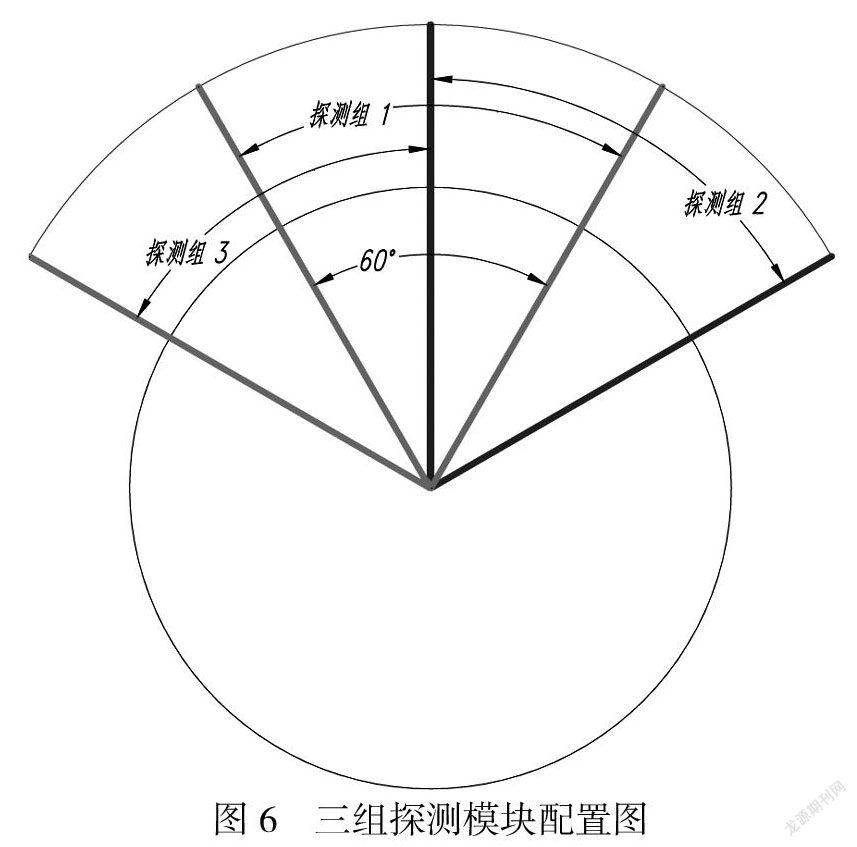
如图6所示,这是三通道的超声波探测模块的配置图,每组模块间均有30度的重叠部分.
超声波探测器安装在运输车车体上,探测范围0.1m-0.5m,波束角度为60度.每组传感器均能在这60度的探测范围内获取障碍物的位置信息.这三组传感器每组均有30度角度的交叉重叠范围,于是,同一个障碍物可能被探测器1和探测器2同时探测到.若探测器1和探测器2同时检测到障碍物,则视为该障碍物有威胁,运输车此时将立即停车并向服务器报告现在的位置.若此障碍物不是路过的正在工作的运输车,即未发生接近事件,此运输车原地顺时针旋转90度,再次探测障碍物信息,若仍有障碍物则逆时针旋转180度,当没有障碍物时,向服务器发送方向信息,由服务器重新规划路线[7].
3.3 路径规划程序
整套路径规划完全在服务器端实现,由服务器根据当前仓库中所有货架以及所有运输车的位置规划出一条没有障碍物的路线.具体的规划方法如图7所示.
从1号位到8号位的整套路径为:天线1识别到2则向前进1——确认天线4识别到2——天线1识别到3则向前进1——确认天线4识别到3——天线1识别到4则向前进1——确认天线4识别到4——天线1识别到5则向前进1——确认天线4识别到5——天线2识别到6则逆时针旋转90度——确认天线4识别到5天线2识别到4天线1识别到6——天线1识别到6向前进1——确认天线4识别到6——天线1识别到7则向前进1——确认天线4识别到7——天线1识别到8则向前进1——确认天线4识别到8.此时已经走完整套路径.若其中某一步由于种种原因偏离了既定的路径,则执行自动纠偏程序.
针对多AGV小车一起工作时会产生相互接近的冲突事件,当接近事件发生时,需要决定哪辆运输车优先通过,这样会影响工作效率.此时需要引入通过优先级,优先级的排布方法如下:
(1)分别计算出每辆运输车与其它运输车经过相同标签的个数和发生接近事件的次数;
(2)比较每辆运输车与其它运输车发生接近事件的次数,将发生接近事件最多的运输车设置为最低优先级,而将发生接近事件最少的运输车设置为最高优先级;
(3)若出现多辆运输车发生接近事件的次数相同,则比较这些运输车与其他运输车经过相同标签的个数,将经过相同标签个数最多的运输车设置为最高优先级;
(4)以此类推,对之后的运输车设置优先级.
在(2)中,降低发生接近事件最多的运输车的优先级,可以让其余运输车更加顺畅的行驶,进而提高了运输效率.在(3)中,提高通过相同标签数最多的运输车的优先级,可以降低因延时而使通过相同标签衍化成接近事件的概率,进而减少了接近事件的发生[8].
3.4 货架托升降程序
货架托的作用是托起货架,带着货架一起移动,起到搬运货架的目的.当运输车停在货架下方时,货架托升起,将货架脱离地面.此时,运输车向服务器发送请求命令,等待服务器下发下一步路径规划命令.
4 结束语
本文通过射频识别技术给AGV运输车提供了另一种引导方式.研究分析了运输车的软件系统,根据射频识别标签精确定位的方式,以及位置引导方式.根据天线组判断运输车的方向,通过自动纠偏程序调整运输车的姿态.本文重点分析了路径规划的方式.通过进一步的相关实验,本文所述的软件系统具有一定的可靠性和稳定性.
参考文献:
〔1〕中华人民共和国国家标准:物流术语(GB/T18354 -2006).
〔2〕魏其琼.基于AGV传输的客车转向架检修流水线[J].铁道机车车辆,2017,37(1):82-85.
〔3〕程航.AGV小车轨迹跟踪控制策略的研究[D].合肥工业大学,2016.
〔4〕王子奇.射頻识别技术基本工作原理和应用领域及发展状况[C].//第二十二届中国(天津)'2008IT、网络、信息技术、电子、仪器仪表创新学术会议论文集.天津市电视技术研究所,2008.89-92.
〔5〕谢永良,尹建军,余承超,等.轮式AGV沿葡萄园垄道行驶避障导航算法与模拟试验[J].农业机械学报,2018,49(7):13-22.
〔6〕杨芳沛,李伟光,郑少华,等.基于超声波传感器的AGV避障模块设计与实现[J].电子设计工程,2015,23(22):56-60,63.
〔7〕刘淑晶,刘金华,吴乐,等.背负式磁导航AGV纠偏控制系统设计[J].高技术通讯,2018,28(7):620-626.
〔8〕泰应鹏,邢科新,林叶贵,等.多AGV路径规划方法研究[J].计算机科学,2017,44(22):84-87.
猜你喜欢
江苏年鉴(2018年0期)2018-02-12 04:22:17
中国制笔(2016年1期)2016-12-01 06:47:30
中国市场(2016年44期)2016-05-17 05:14:53
中国市场(2016年44期)2016-05-17 05:14:53
中国商论(2016年33期)2016-03-01 01:59:35
大庆师范学院学报(2015年3期)2015-12-24 07:35:42
现代企业(2015年4期)2015-02-28 18:49:06
江苏年鉴(2014年0期)2014-03-11 17:09:33
技术经济与管理研究(2014年11期)2014-03-11 17:02:56
职业教育研究(2011年6期)2011-03-25 10:36:15