
智能导盲车设计与制作
2019-09-10 22:43胡澳沈鑫房剑飞吴金文
科学导报·科学工程与电力 2019年44期
胡澳 沈鑫 房剑飞 吴金文

【摘 要】智能导盲车是为视觉障碍者提供环境导引的辅助工具。它属于服务机器人范畴,通过多种传感器对周围环境进行探测,将探测的信息反馈给视觉障碍者,帮助弥补他们视觉信息的缺失。世界上视觉障碍者数量众多,而他们只能用60%的感觉来获取经验。因而设计一款实用的导盲机器人来帮助视觉障碍者是十分重要的。
【关键词】智能导盲车;传感器;
Abstract:Intelligent guide vehicle is an auxiliary tool to provide environmental guidance for people with visual impairment.It belongs to the category of service robots,through a variety of sensors to detect the surrounding environment,the information of the detection feedback to the visually impaired,help to make up for their lack of visual information.The number of people with visual disabilities in the world is large,and they can only use 60% of the feeling to gain experience.So it is very important to design a practical guide robot to help the visually impaired.
Keywords:Intelligent guide car;Sensor;
引言
來自世界卫生组织权威数据揭示,全世界视觉障碍着数量多于1.5亿,盲人数量达到4500万,我国的人口数量庞大,盲人也非常多,占据世界份额的18%。由于视觉信息的缺失,视力障碍者难以感知周围环境,自由行走受到阻碍,使其生活自理等方面受到诸多限制。无法完全自主的行动给视觉障碍患者的平常生活带来了较多不便和麻烦,是影响其日常生活质量的重要因素。随着视力障碍者数量的不断增长,社会对引导辅助工具的需求更多要求也更高,因此,对于盲人引导辅助设备的研究刻不容缓。
本文在综述国内外现有导盲机器人的基础上,确定了智能导盲车的总体设计方案。其中智能导盲机器人行走方式采用履带式行走结构,驱动电机控制车体行进方向。采用单片机控制,配备超声波传感器、红外传感器等检测环境信息,随之将与障碍物之间的距离信息传送至显示屏上,并具有语音提示功能。
1.总体电路结构设计
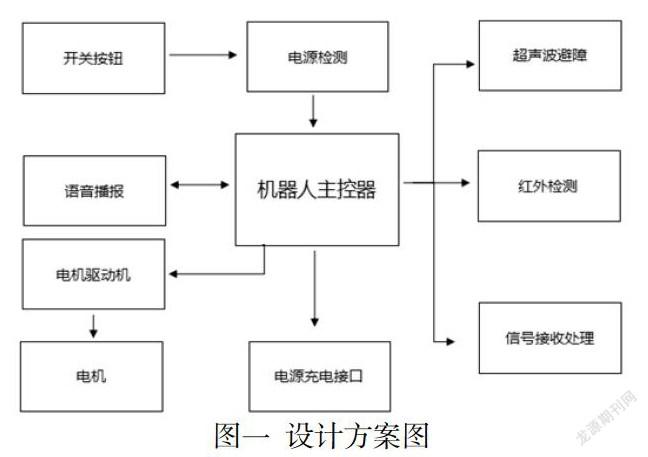
本文所设计的智能导盲车主要是由控制模块,传感器模块,电机驱动模块,语音模块和显示模块组成,其中最重要的部分是控制模块,采用STM32F1VET6为主控芯片。电机驱动模块采用直流减速电机和L298N电机驱动板构成,驱动信号由控制模块输出,传送至L298N驱动板控制电机转动;传感器模块分别采用超声波传感器和红外传感器,这两种装置加上舵机共同组成了传感器模块,实现对周边环境的识别;语音模块采用JQ8900-16P芯片和喇叭构成,通过控制模块传送的信号进行语音提示;显示模块则使用OLED屏作为显示器,通过传感器模块所传递的信号,在控制模块中进行一系列转换,最终传送至OLED屏中显示当前周边环境的信息。通过各个模块之间相互作用来实现智能导盲车的功能。图一为设计方案图。
2.硬件设计
2.1控制模块
控制模块采用STM32F1系列芯片,STM32F1 系列产品基于超低功耗的 ARM Cortex-M3 处理器内核,整合增强的技术和功能,瞄准超低成本预算的应用。该系列微控制器缩短了采用 8位和16位微控制器的设备与采用32位微控制器的设备之间的性能差距,能够在经济型用户终端产品上实现先进且复杂的功能。
2.2传感器模块
传感器模块主要由超声波传感器和红外传感器构成,通过超声波和红外传感的相互作用,增加对周边环境信息的准确性。
2.3电机驱动模块
电机驱动模块由电动机和电机驱动芯片组成,其中驱动芯片采用L298N驱动芯片,而电动机种类繁多,根据电机的结构和工作原理,又可将电机分为直流电机和交流电机。其中异步电动机具有结构简单、制造成本低的优点,而且工作效率高,运行可靠,普遍用于各种产业。因此本文采用的电机为直流减速电机。
2.4显示模块
显示屏幕种类繁多,其中OLED显示屏是利用有机电致发光二极管制成的显示屏。由于同时具备自发光,不需背光源、对比度高、厚度薄、视角广、反应速度快、可用于挠曲性面板、使用温度范围广、构造及制程较简单等优异之特性,被认为是下一代的平面显示器新兴应用技术。所以本文采用的显示器为OLED屏幕。
2.5语音播报模块
作为服务类机器人,语音播报是必不可少的环节。而本文采用的语音控制芯片为JQ8900-16P。此芯片最大的优势在于能够灵活的更换SPI-flash内的语音内容,省去了传统语音芯片需要安装,上位机更换语音的麻烦,使得产品研发和生产变得.便捷简单。
3.软件系统总体流程设计
3.1控制模块的I/O地址分布
4.总结
实验现象:按下启动按键,智能导盲车发出启动语音开始工作,当前方遇到障碍物时,及时刹车停止前进并发出前方有障碍物的语音,转动舵机读取机器人左右两边道路情况,当右边比左边空旷时,发出向右转的指令并进行语音提示。相反,当左边比右边空旷时发出向左转的指令并进行语音提示。当左右两边均无法通过,则发出掉头的指令。当按下结束按键机器人停止工作并发出结束语音。
误差分析:在前进过程中,超声波信号传递存在延迟,导致不能及时刹车。解决方法是添加红外传感器使其与超声波传感器相互作用,使导盲更加精准,增加容错率。
参考文献:
[1]赵娅楠,许汇冬,张翠霞,马振伟.基于Cortex的智能导盲车设计系统[J].电子世界,2018(24):192-193.
[2]王力程,陈锐,韩旭,苏龙霞.基于超声波测距原理的电子导盲车设计[J].电子技术与软件工程,2018(18):98-99.
[3]胡琪才,陈雪丽,汪益栋,彭静.一种可越障避障新型智能导盲推车的设计[J].电子制作,2017(15):15-16.
[4]廖文,徐进,高莹,刘超,刘重阳.超声波测距导盲车关键技术的研究[J].计算机测量与控制,2017,25(06):294-297.
[5]陆中宏,甄智.基于MultiFLEX2-PXA270控制器的导盲车设计[J].内燃机与配件,2016(12):1-2.
作者简介:
胡澳(1999—),男,汉族,河北邯郸,学生,学士,研究方向为自动化;
沈鑫(1999—),男,汉族,江苏盐城,学生,学士,研究方向为自动化;
房剑飞(1991-),男,汉族,江苏南京,教师,讲师,硕士,研究方向机电一体化;
吴金文(1984-),男,汉族,江苏南京,教师,讲师,硕士,研究方向机电一体化。
基金项目:
江苏省高等学校大学生创新训练计划项目智能导盲车的设计与制作,(项目编号:201913905022H)。
(作者单位:1,2,3,4南京工业大学浦江学院)
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22
红领巾·探索(2020年2期)2020-05-19
电脑报(2019年10期)2019-09-10
工业设计(2019年3期)2019-06-11
小天使·六年级语数英综合(2018年10期)2018-10-15
恋爱婚姻家庭(2017年3期)2017-03-03
军事文摘·科学少年(2016年7期)2016-09-20
山东青年(2016年6期)2016-05-14
WTO经济导刊(2016年4期)2016-04-27
航空模型(2016年1期)2016-03-01
