
国内电动舵机故障诊断综述
2019-09-10 07:22:44杨硕
河南科技 2019年5期
杨硕

摘 要:本文在综合国内文献的基础上,首先介绍了电动舵机故障诊断推理方法,指出了各种方法的优缺点,然后探讨电动舵机故障诊断推理的应用现状,最后分析电动舵机故障诊断发展趋势,以期能为电动舵机故障诊断提供借鉴。
关键词:电动舵机;故障诊断;诊断方法
中图分类号:TJ760.3 文献标识码:A 文章编号:1003-5168(2019)05-0067-05
Abstract: Based on the domestic literature, this paper first introduced the fault diagnosis reasoning methods of electric actuator, pointed out the advantages and disadvantages of various methods, then discussed the application status of fault diagnosis reasoning of electric actuator, and finally analysed the development trend of fault diagnosis of electric actuator, in order to provide reference for fault diagnosis of electric actuator.
Keywords: electric steering gear;fault diagnosis;diagnostic method
电动舵机以其体积小、重量轻、响应快、控制方便等特点在空空导弹、无人飞行器、制导炮弹等领域得到了广泛应用[1-3]。作为飞控系统的执行机构,电动舵机的工作性能、可靠性等对整个系统具有巨大的影响。如果电动舵机发生故障,将会造成严重损失[4-6]。因此,对电动舵机进行故障诊断具有十分重大的意义。
本文对近年来国内电动舵机故障诊断的理论体系、应用、取得的成果等方面进行归纳、总结,并在此基础上,展望未来电动舵机故障诊断技术的发展方向。
1 电动舵机的组成及其故障诊断
1.1 电动舵机组成及工作原理
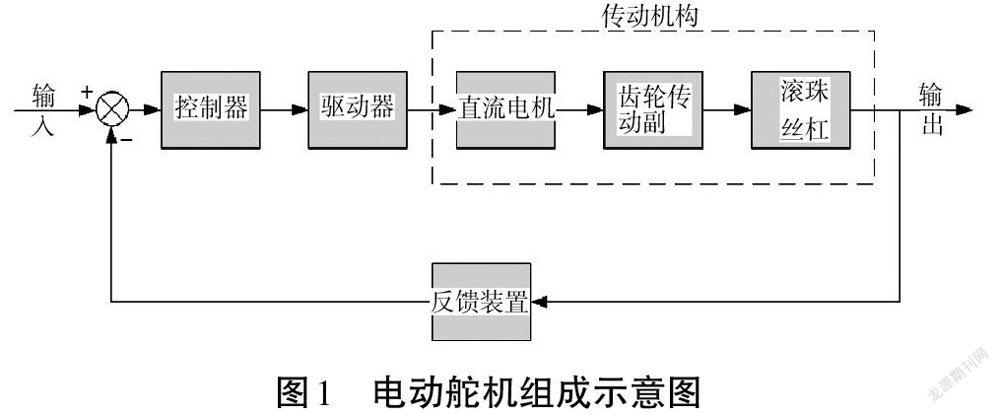
电动舵机是飞行器上重要的伺服機构系统,一般由舵机控制器、电机驱动器、直流电机、齿轮传动副、滚珠丝杠和反馈装置等组成,其中直流电机、齿轮传动副和滚珠丝杠等称之为舵机的传动机构。图1为电动舵机组成示意图。
电动舵机的工作原理是:电动舵机接受飞控/制导计算机给定的舵面偏角信号,经由电路上的控制电路处理后,生成驱动器逻辑控制信号,由驱动器驱动电机开始转动,经过齿轮传动副+滚珠丝杠组成的减速装置将动力输出到舵轴,驱动舵面转动,同时与舵轴相连的位置传感器(反馈装置)送回检测信号,判定舵面是否已经到达位置。
1.2 电动舵机故障诊断
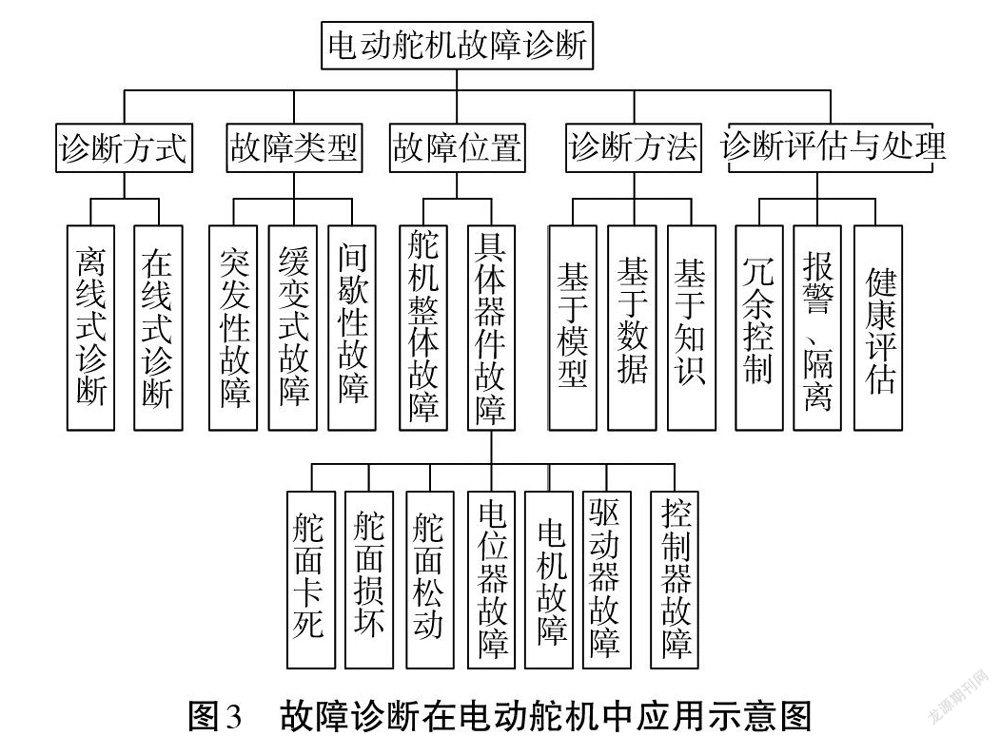
故障诊断系统是指具有故障信息处理和推理、故障评价与决策、故障处理能力的系统,如图2所示。由于故障诊断信息来源和处理方式不同,故障诊断推理方法也不尽相同,主要有基于模型、基于信号和基于知识三大类。在由故障诊断推理对故障信息进行处理和推理后,故障诊断系统需要识别出故障类型或故障部位,并对故障的程度进行评估,将故障部分进行隔离,随后向外部发出警报,并可通过冗余控制进行故障隔离后的自修复控制,确保将故障损失降到最小。
2.1 基于模型的故障诊断推理方法
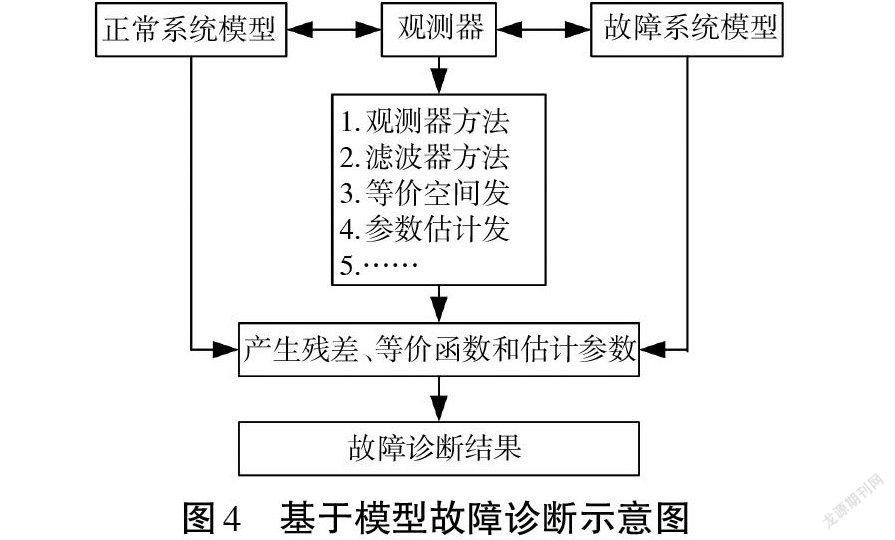
基于模型的故障诊断推理方法的主要工作流程如图4所示。利用该方法进行故障诊断,大致可分为三步。第一步,寻找合适的观测器,以得到合适的系统输出;第二步,将观测器的输出与实际系统测量所得值进行比较,生成残差、等价函数或估计参数;第三步,通过事先设计好的残差判断规则对残差进行分析,从而确定故障类型、产生时间、故障点等,进而给出故障诊断结果。
2.2 基于信号的故障诊断推理方法
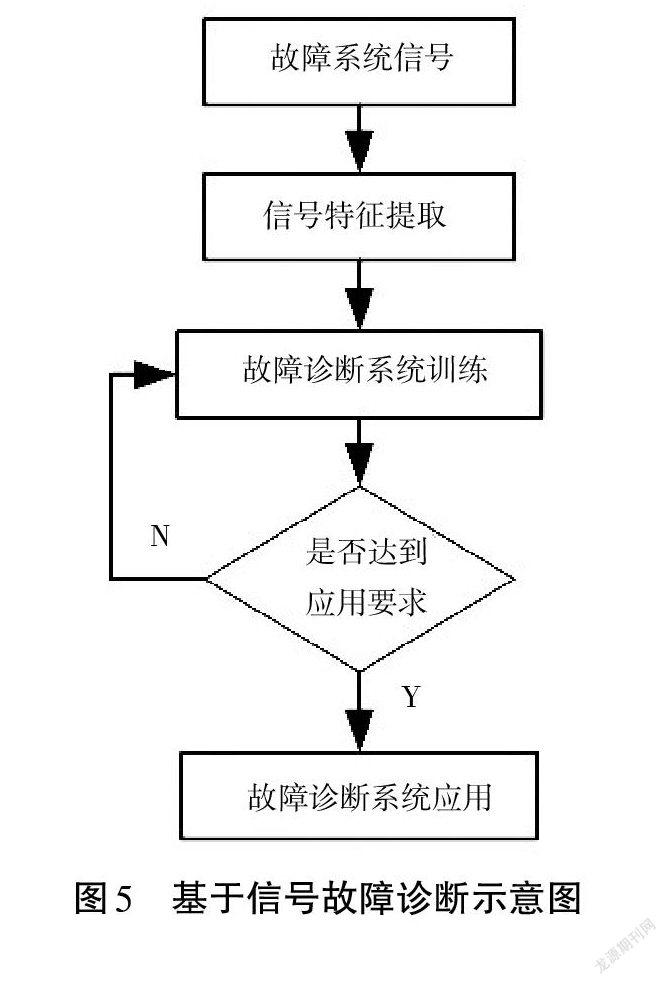
基于信号的故障诊断推理方法的主要工作流程如图5所示。具体流程如下。通过傅里叶变换、小波分析、经验模态分解等方法对信号进行处理,提取故障信号特征值。由于信号并不能直接反映故障类型、故障部位等,还需引入故障诊断系统。故障诊断系统由神经网络组成,其输入值为提取的故障信号特征值,输出值为故障类型和故障部位等。经过反复对故障诊断系统进行训练,达到事先设定好的应用标准后即可投入实际故障诊断中。但是,该类方法易受到系统非线性因素和噪声的干扰[8,9]。
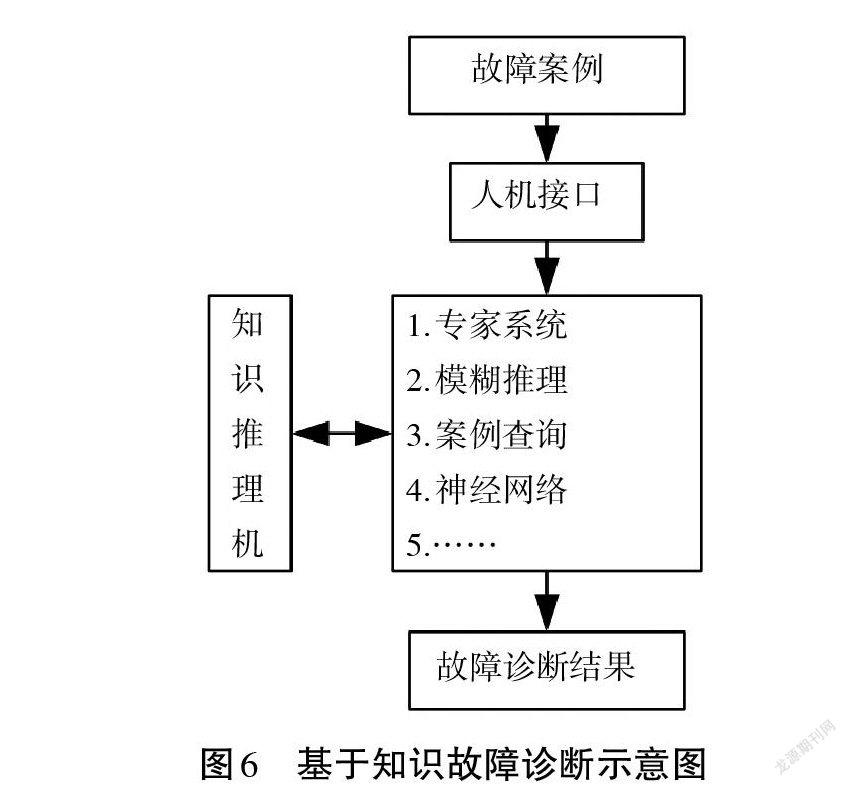
2.3 基于知识的故障诊断推理方法
基于知识的故障诊断推理方法[10]主要是将故障案例通过人机接口传给知识推理机,由知识推理机经过处理后给出故障诊断结果。知识推理机包括专家系统、模糊推理、案例查询、神经网络等多种故障诊断推理方法,也可以是上述故障诊断推理方法的综合应用。基于知识的故障诊断推理工作流程如图6所示。
3 电动舵机故障诊断系统的应用现状
电动舵机的故障诊断应用主要可以分为三大类,一是研究舵机故障模型,以便在真实故障发生后进行故障原因分析,定位故障部位;二是采用仿真手段构建舵机模型,通过对比故障模型与真实系统之间的残差进行故障诊断。前两类均属于离线故障诊断,第三类则是在线故障诊断,在舵机控制系统中实时地将检测到的电动舵机工作状态/参数与事先标定好的标准状态/参数进行比较,实时判断舵机故障。
3.1 电动舵机故障模型应用
电动舵机的故障与其中各组成部分息息相关,因此,利用各部分的传递函数搭建电动舵机的故障模型,对电动舵机传递函数故障模型进行分析,得到与故障对应的相关组成部分便成为最常见的电动舵机故障模型。
杨秉岩等[11]构建了包含电动舵机中伺服电机、驱动器、反馈电位器和传动机构等在内的舵机正向传递模型。采用辨识算法对舵机系统频谱信号中包含的传递函数和传递函数中各系数进行识别,得到电动舵机的反向传递函数。分析舵机正向、反向传递函数的数值,进而确定电动舵机是否出现故障以及故障范围。若反向传递函数阶数发生变化,可断定发生了损坏性故障,在故障库中查找对应的故障类型;如果反向传递函数系数发生变化,可断定发生参数超调性故障,利用参数与元件之间的对应关系来确定故障范围。
刘昆朋等[12]同样基于舵机传递函数构建故障模型。通过多次仿真,利用舵机自检信息得到故障阈值,可对舵机的元器件参数故障进行诊断,但并不能覆盖所有参数故障。
3.2 电动舵机故障残差分析应用
利用残差对电动舵机进行故障诊断是目前普遍使用的故障诊断方法。通过残差的获得手段、分析方法等可将其分为观测器、半实物仿真、阈值等不同的利用残差进行故障诊断的具体应用。
3.2.1 观测器故障诊断。一般来说,电动舵机的故障类型较多,采用单一的观测器不能覆盖所有的故障类型。对于该问题,主要有两种解决方法:一种是构建多个观测器,分别对应不同的故障类型;另一种是构建自适应观测器,自动适应不同的故障类型。张栋等[13]设计了多观测器切换机制,以解决多个观测器的选取问题,使舵机故障状态能及时准确地被切换到最合适的观测器,给出最接近实际情况的故障信息。廖瑛等[14]则通过构造自适应观测器获取反映系统故障的残差信息,针对该系统出现的故障,利用序列概率比方法进行故障决策。
为了解决观测器构建困难的问题,史贤俊等[15]将神经网络作为故障观测器。利用径向基函数神经网络的结构简单、收敛速度快、非线性映射能力强和鲁棒性等特点,通过粒子群优化算法选取神经网络参数,经过参数优化和训练后的径向基函数神经网络可有效识别出舵机的相关故障。
3.2.2 半实物仿真残差的故障诊断。由于建立精确的模型较为困难,为较为简便地获取等效模型,有学者提出了利用dSPACE与电动舵机执行机构进行半实物仿真,通过参数识别来获得舵机的等效模型,以避免模型不准确造成虚检和漏检。
邱聚能等[16]采用搭建故障观测器的思路,提出了一种基于子空间辨识的卡尔曼滤波故障检测方法,借助于dSPACE半实物仿真工具,搭建了电动舵机故障检测半实物仿真平台,实现了未知参数电动舵机的在线故障检测和快速故障分析。
3.2.3 残差阈值的故障诊断。阈值分析法的关键是残差阈值的设定,若设定的阈值过小,则当系统存在噪声干扰或者解析模型存在偏差时,会做出存在故障的错误判断,造成虚警;若设定的阈值过大,则当系统发生故障时,残差小于阈值,造成漏检或诊断不够实时。
残差阈值的确定通常有如下几类方法。①简单阈值。为了减少计算量,缩小误警,该类情况在设定阈值的基礎上进行适当放大。如史贤俊等人的研究[15]就将训练所得阈值的3倍作为故障报警阈值。②数学分析方法。利用该类方法获得阈值,需要对残差进行一定的数学计算。如王鹏[17]等利用一元线性回归分析方法对残差的阈值进行计算。李勇[18]等则将阈值与改进序贯概率比算法相结合,以迅速诊断出阶跃性故障和缓变性故障。③人工智能方法。梁瑞胜[19]等采用BP神经网络对阈值进行训练,有效实现了故障的诊断和定位。
3.3 电动舵机实时故障诊断应用
3.3.1 模糊聚类实时故障诊断。章家保等[20]在对电动舵机致命性故障进行实时检测/诊断时,采用模糊聚类方法。对电动舵机正常工作时的状态数据通过归一化处理和模糊计算,得到隶属度矩阵和聚类中心矩阵。在电动舵机实际工作中,计算每个控制周期的舵机状态样本与舵机标准样本聚类中心之间的距离,进而进行故障检测/诊断,具有实时性强、准确率高的特点。但是,该方法只适用于对减速器卡死、电机故障、传感器故障等致命性故障进行检测/诊断,对于非致命性、偶发性、缓慢性故障,由于尚未取得标准状态样本数据,故不适用。
3.3.2 特征模型实时故障诊断。为避免真实系统与数学模型之间建模造成的误差,朱纪洪等[21]通过建立电动舵机特征模型的方法将建模误差降到最小,使特征模型与实际对象在面对相同的控制输入时,两者的输出是“等价”的。由此,可以避免控制饱和、负载扰动造成的虚警。
在实际工作中,对电动舵机速率和位置数值进行积分计算,将其与速率阈值和位置阈值进行比较,一旦超过阈值,即进行报警。
3.3.3 半实物仿真实时故障诊断。李云龙等[22]将舵机的输入电压作为故障信号源,通过在dSPACE中构建相应的舵面卡死/损伤故障模式,获取相关数据。对相关数据进行实时分析,在0.25s内给出诊断结果,实时性较好。
4 电动舵机故障诊断发展趋势
随着信号处理、新型仿真软件、人工智能、数据挖掘等技术的不断发展,电动舵机的故障诊断也呈现出新的发展趋势,主要表现在以下几方面。
4.1 传感器故障诊断
与通过解析模型进行多种类型故障诊断不同,通过传感器进行故障检测的故障类型较为单一,但可以通过硬件实现,并进行在线故障检测。因此,仅在关键部位采用。如田乾乾等人的研究[23]中采用传感器实时检测电动舵机中驱动电路的故障信号,大大提高了电动舵机整体的可靠性。今后,随着传感器技术的不断发展,可考虑进行多传感器信息融合的故障诊断。
4.2 专业仿真软件故障诊断
解析模型虽然可以反映电动舵机系统故障,但难以精确确定其内部具体器件的故障。采用实物对比验证的方法也需要解析模型具有较高的精度。因此,利用专业仿真软件进行故障仿真和诊断就成为电动舵机故障诊断的发展趋势。张奎轩等人的研究中[24]就利用Protetus软件搭建了电动舵机电路模型,并利用该仿真模型进行具体元器件的故障诊断。
4.3 健康评估
周维正[25]和吴茂兴[26]将源于飞行器集成健康管理理念引入电动舵机故障诊断。将电动舵机的健康分为标称态和非标称态的综合,非标称态描述了系统实际运行的渐变和突变过程,用参数百分比或类似形式进行健康建模,可以更好地体现渐变过程,从而提供趋势预测,进行主动维护,便于对电动舵机的工作状态进行监护,并能提供更加准确的健康评估。
5 结论
近年来,国内关于电动舵机故障诊断技术的研究和应用成果较多。但从文献分析可知,目前航空领域电动舵机故障诊断的应用成果主要体现在地面测试、事后确定故障类型、离线故障诊断等方面,故障诊断类型较为单一。但是,也开展了实时故障诊断、传感器故障、健康评估、新型故障诊断方法等新型研究。未来,随着基础研究和新兴技术的不断发展,电动舵机的故障诊断将会取得更大的发展。
参考文献:
[1]吕帅帅,林辉,陈晓雷,等.弹载电动舵机幂次滑模反演控制[J].北京理工大学学报,2016(10):1037-1042.
[2]付克亚.一种数字无刷电动舵机控制系统的设计[J].航空兵器,2018(4):84-88.
[3]李怀兵,徐豪榜,晋华峰,等.一种无人机用一体式电动舵机的研究[J].微电机,2017(4):17-25.
[4]靳凌,董继鹏.考虑舵机故障的空空导弹飞行控制系统主动容错控制[J].弹箭与制导学报,2014(6):618-621.
[5]付永领,庞尧,刘和松,等.基于故障建模的双余度舵机故障诊断技术[J].北京航空航天大学学报,2011(11):1372-1377.
[6]吕永健,李子龙,张洪林.基于改进遗传小波网络的电机故障诊断研究[J].微特电机,2012(4):19-21.
[7]吴彬.基于模型的故障诊断计算及其在电动舵机上的应用[D].湘潭:湘潭大学,2008.
[8]王炜,钟书辉.基于RBF神经网络的无刷直流电动机故障诊断[J].微特电机,2018(5):44-47.
[9]柴永利,王炜,何卫国.一种无刷直流电动机故障诊断方法研究[J].微特电机,2018(6):49-52,61.
[10]季文韬,陈汶滨,张平.基于案例模糊的无人机故障诊断系统[J].计算机系统应用,2011(1):32-35.
[11]杨秉巖,程绍成,朱伟,等.基于传递函数识别的导弹电动舵机故障诊断[J].海军航空工程学院学报,2012(5):494-498.
[12]刘昆朋,曾庆华.导弹舵机参数故障诊断方法[J].导弹与航天运载技术,2008(6):13-15.
[13]张栋,李春涛,杨艺.基于多模型参数估计的舵机故障诊断算法[J].电光与控制,2014(12):85-89,105.
[14]廖瑛,吴彬,曹登刚,等.基于自适应观测器的导弹电动舵机故障诊断研究[J].系统仿真学报,2011(3):618-621.
[15]史贤俊,张文广,张艳,等.PSO-RBF神经网络在舵机系统故障诊断中的应用[J].海军航空工程学院学报,2011(2):131-135.
[16]邱聚能,李辉.基于dSPACE的无人机电动舵机故障检测[J].弹箭与制导学报,2017(2):123-128.
[17]王鹏,张瞿辉,金波,等.基于一元线性回归分析的舵机故障诊断算法[J].火力与指挥控制,2009(7):20-23.
[18]李勇,曹东.基于解析模型的飞控系统执行机构的故障诊断[J].电光与控制,2016(10):104-107,111.
[19]梁瑞胜,孙有田,周希亚.小波包变换和神经网络的某型导弹故障诊断方法研究[J].海军航空工程学院学报,2008(2):217-220.
[20]章家保,徐伟.模糊聚类方法在电动舵机致命故障检测中的应用[J].红外与激光工程,2014(S1):123-129.
[21]朱纪洪,和阳,黄志毅.舵机特征模型及其故障检测方法[J].航空学报,2015(2):640-650.
[22]李云龙,夏洁,时子房.基于半实物仿真的飞行器舵机操纵面故障检测[J].系统仿真学报,2015(8):1914-1921.
[23]田乾乾,范海峰.新型故障监测传感器在机载云台电动舵机中的应用[J].传感器与微系统,2014(9):148-151.
[24]张奎轩,曾庆华.面向故障仿真的舵机系统建模方法研究[J].航空计算技术,2015(3):618-621.
[25]周维正,李学锋,曾庆华.基于参数辨识的电动舵机系统健康仿真和评估[J].国防科技大学学报,2016(4):132-136.
[26]吴茂兴,曾庆华.基于电动舵机的健康仿真与评估方法研究[J].航空计算技术,2012(3):38-41.
猜你喜欢
装备制造技术(2020年3期)2020-12-25 05:22:30
中国现代医生(2016年26期)2016-11-28 02:33:33
北京航空航天大学学报(2016年6期)2016-11-16 01:50:43
活力(2016年10期)2016-10-18 18:05:07
考试周刊(2016年69期)2016-09-21 21:45:16
中国实用医药(2016年13期)2016-07-05 11:24:30
中国实用医药(2016年13期)2016-07-05 04:07:59
中国科技博览(2016年14期)2016-04-25 00:24:53
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28 07:43:58
振动、测试与诊断(2014年5期)2014-03-01 01:14:21
