高精度和高分辨率水下地形地貌探测技术综述
2019-09-10 07:22:44宋帅周勇张坤鹏范孝忠
海洋开发与管理 2019年6期
关键词:声呐
宋帅 周勇 张坤鹏 范孝忠

摘要:为提高我国水下地形地貌探测技术水平,促进对海洋的科学认知和高效开发利用,文章综述高精度和高分辨率水下地形地貌探测技术研发进展,并分析关键技术发展方向。研究结果表明:采用机载激光、多波束、侧扫声呐、浅地层剖面、双频识别声呐、合成孔径声呐和水下三维扫描声呐等探测技术以及无人船、水下机器人和海底观测网等探测平台,可获取高精度和高分辨率水下地形地貌信息;应在提高设备性能、减小探测误差和完善数据算法等方面加大研究力度,重点发展综合探测技术,从而全面和清晰地反映水下地形地貌。
关键词:水下探测;声呐;多波束;海洋调查;水声工程
中图分类号:P71;TB56 文献标志码:A 文章编号:1005-9857(2019)06-0074-06
A Summary of High-precision and High-resolution Underwater Topography Detection Techniques
SONG Shuai1,ZHOU Yong2,ZHANG Kunpeng1,FAN Xiaozhong1
(1.Troop 32033,Haikou 571100,China;
2.Beijing Piesat Information Technology Co.,Ltd.,Beijing 100195,China)
Abstract:In order to improve the technology of underwater topography detection and promote the scientific recognition and efficient development and utilization of the ocean,this paper reviewed the research progress of high-precision and high-resolution underwater topography detection technology,and analyzed the developing prospect of key technologies.The results showed that high-precision and high-resolution underwater topographic information can be obtained by using airborne laser,multi-beam,side-scan sonar,shallow stratum profiler,dual-frequency recognition sonar,synthetic aperture sonar,underwater three-dimensional scanning sonar and other detection techniques,as well as unmanned ship,underwater vehicle and submarine observation network.For the purpose of detecting the underwater topography fully and clearly,it should strengthen the research on improving equipment performance,reducing detection errors and optimizing data algorithms,and focus on the development of comprehensive underwater detection technology.
Key words:Underwater detection,Sonar,Multi-beam,Ocean survey,Underwater acoustic engineering
随着声学尤其是多波束探测技术以及卫星遥感和计算机等技术的进步,彻底改变水下地形地貌探测方式[1],即采取数字化测量、自动化操作、智能化处理和可视化显示等综合技术,以各种平台为载体,在不同深度水域,快速获取高精度和高分辨率水下地形地貌信息[2]。其中,探測平台包括卫星、飞机、船舶、水下机器人和水下观测网,探测深度包括浅层(水深小于200 m)、浅中层(水深200~2 000 m)和深层(水深大于2 000 m)。
1 探测技术
1.1 机载激光探测技术
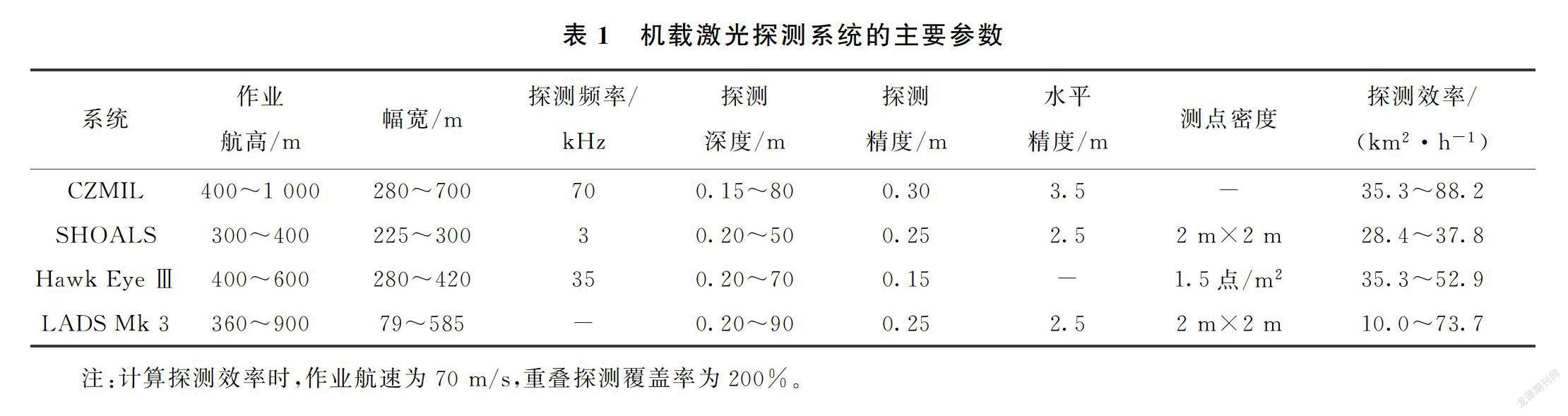
与传统的船载声学探测技术相比,机载激光探测技术具有精度高、范围大、密度大、周期短、成本低和机动性高等特点[3],且具有浅层水域探测优势,探测深度最小可达0.15 m,有效填补近海探测的空白[4]。此外,最大探测深度为90 m[5],精度通常小于0.3 m,测点密度最大可达0.12 m×0.12 m[2]。
自20世纪60年代起,中国、美国、加拿大、俄罗斯、法国、瑞典、荷兰和澳大利亚等国家相继开展机载激光探测技术研究,常见的机载激光探测系统如表1所示。
机载激光探测技术在获取浅层水域尤其是近海的高精度和高分辨率水下地形地貌信息方面具有广阔的应用前景,目前我国在该领域仍未实现产业化,但已研发多代样机并开展多次探测实验,实验结果符合预期,发展潜力较大;但仍须突破若干关键技术,进一步提高探测精度,满足IHO S-44一类标准的基本要求和探测任务的实际需求[4]。
(1)定位和定向技术。机载激光探测技术对探测点的精确定位和定向通常通过高精度航空遥感运动补偿姿态系统(POS)实现,目前我国相关研究已取得突破性进展,如基于滤波器建模的时延补偿法的对称8点减振惯性敏感组件结构、采用伪距和伪距率的紧耦合导航系统以及适用于PPP/INS紧密组合的前后向平滑算法,都可有效提高POS的精度和稳定性[5]。
(2)波浪和潮汐修正技术。黄谟涛等[6]和胡善江等[7]研究并总结无修正法、滤波法和惯导辅助修正法3种波浪和潮汐修正方法,利用平均海平面的高程计算探测点的海底高程,解决探测瞬时海面与深度基准面的相互转换问题,从而提高探测精度。
(3)探测精度评估技术。对探测数据误差的分析和校正是获取高精度和高分辨率水下地形地貌信息的关键,黄谟涛等[6]和欧阳永忠等[8]对深度归算技术的研究,为评估探测精度提供参考。
(4)多源数据融合技术。在处理探测数据的过程中,须对航线边缘的覆盖探测、不同时间的分段探测和多种设备的组合探测等的多源数据进行精度补偿,从而提高整体探测精度。
1.2 多波束探测技术
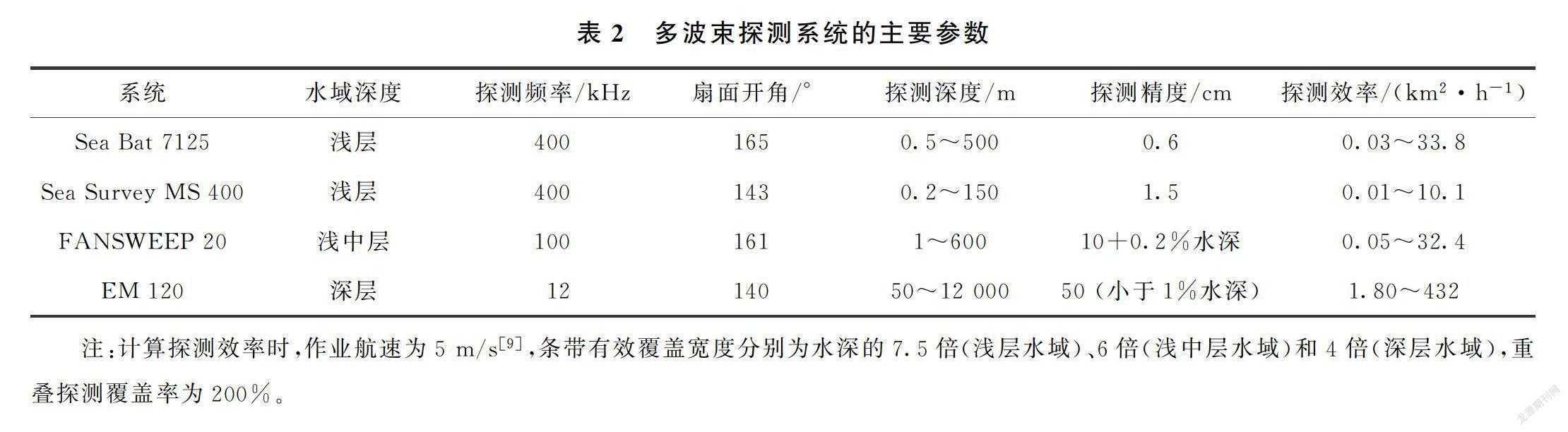
多波束探测技术采用较窄波束的条带式探测和宽扇面的覆盖探测、高密度的探测点云、集成化的组合系统、结合传感器的姿态修正以及声速剖面的声线修正,具有探测范围大、速度快、效率高和精度高等显著优势,保障高精度和高分辨率水下地形地貌信息的获取。
根据波束形成的原理,多波束探测系统可分为电子多波束探测系统和相干多波束探测系统。与电子多波束探测系统接收多个波束相比,相干多波束探测系统通过回波角度的相位获取数据,具有数据快速采集和处理的特点。适用于不同水域深度的多波束探测系统如表2所示。
多波束探测技术是获取高精度和高分辨率水下地形地貌信息的最重要的声学探测技术之一,基于应用需求,须从硬件设备和软件数据2个方面着手,取得突破性的研究进展和技术创新。其中,对采集数据的后期处理是至关重要的环节,涉及的关键技术包括声速剖面处理技术、异常数据检测和处理技术以及条带数据拼接处理技术等[10]。
(1)声速剖面处理技术。声速剖面处理是多波束探测数据处理中的重要环节之一。由于海水具有非均质性,声线在海水不同介质层间发生折射而弯曲,不仅影响探测深度(声线的传播距离),而且影响探测结果,且越往条带边缘处声线的弯曲越明显,影响也越大。赵建虎等[11]和丁继胜等[12]提出采用实测声速、温度和盐度的剖面数据,建立声线跟踪模型和计算公式,从而减小声线弯曲造成的误差,提高探测精度和分辨率。
(2)异常数据检测和处理技术。受海风和海浪等海洋环境、船身震动、环境噪声和气泡等因素的影响,采集的原始数据难免存在异常,对异常数据的检测和处理决定探测结果的真实性和可靠性。此外,在数据量极大的情况下,人-机交互的数据处理方式可靠性较高但效率较低。目前CUBE算法[13]取得极大的研究进展,并在异常数据检测和处理中得到广泛应用。在实际应用中,采用人-机交互和智能算法相结合的方式可获得更好的效果。
(3)条带数据拼接处理技术。为实现对水下地形地貌的全覆盖探测,相邻条带的边缘一般有所重叠。受随机误差和环境干扰等因素的影响,条带边缘重叠区的数据容易产生明显误差。因此,须建立相应的精度补偿模型,基于多源数据融合技术,采用误差验后补偿理论和两步平差计算方法,实现条带数据的合理拼接处理[14]。
1.3 侧扫声呐探测技术
侧扫声呐探测技术根据回声探测仪的工作原理,利用声线的反向散射信号获取水下地形地貌信息,并生成直观反映水下微地形地貌的图像,同时还可根据海底回波的强度定性分析海底底质成分。侧扫声呐可分为船载式和拖曳式,其中船载式侧扫声呐的探测幅度宽和效率高,但分辨率较低;拖曳式侧扫声呐可根据探测任务的需求調节拖体距水底的高度,以获取高精度和高分辨率水下地形地貌信息。
传统的电子型侧扫声呐的正下方存在探测盲区,而相干型侧扫声呐结合条带探测手段,可通过声线回波的相位精确定位探测点,并可提高探测精度。但水深大于200 m时,相干型侧扫声呐的探测效果不如电子型侧扫声呐[2]。
侧扫声呐探测的最大有效作用距离取决于声呐设备的工作频率,探测分辨率则与脉冲宽度(距离分辨率)和水平波束开角(水平分辨率)有关。常见的侧扫声呐探测系统如表3所示(不同探测频率条件下)。
侧扫声呐探测技术具有造价较低、分辨率高和可连续获取二维海底图像等优势,得到广泛应用。拖曳式侧扫声呐的拖体须尽可能地贴近海底,因而探测效率较低;同时,为保障拖体的安全,作业航速不能过快,进一步限制探测速度。
1.4 浅地层剖面探测技术
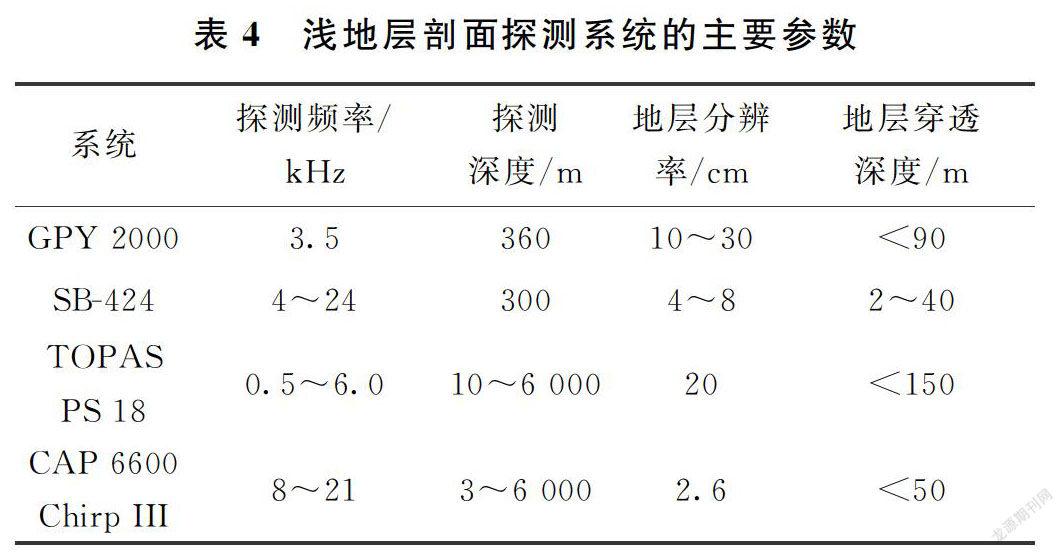
浅地层剖面探测技术基于水声学原理,利用声线反射,连续走航式探测海底地形地貌、浅层沉积地层和基底、特殊目标以及浅表层灾害地质体,具有效率高、分辨率高和成本低等优势,且探测所得的声学记录剖面在形态上与真实地质剖面极其相近。
随着非线性声线传播技术[15]和实时海底追踪时延记录技术等的发展,浅地层剖面探测技术实现高精度和高分辨率水下地形地貌探测,并应用到深层水域。常见的浅地层剖面探测系统如表4所示。
海底底质、环境噪声和船身震动等都会干扰浅地层剖面探测,为保障获取高精度和高分辨率水下地形地貌信息,须减小甚至消除这些因素的影响,可采用直达波、多次波和侧反射等方法[16]进行分析和校正,并改变声源和接收基阵的指向等。此外,根据应用需求,浅地层剖面探测技术也应有所突破,如:采用超宽频技术,解决分辨率与地层穿透深度之间的冲突,提高在深层水域的探测能力;与多波束探测技术和侧扫声呐探测技术相结合,实现三维探测;进一步提高探测精度和效率[17]。
1.5 双频识别声呐探测技术
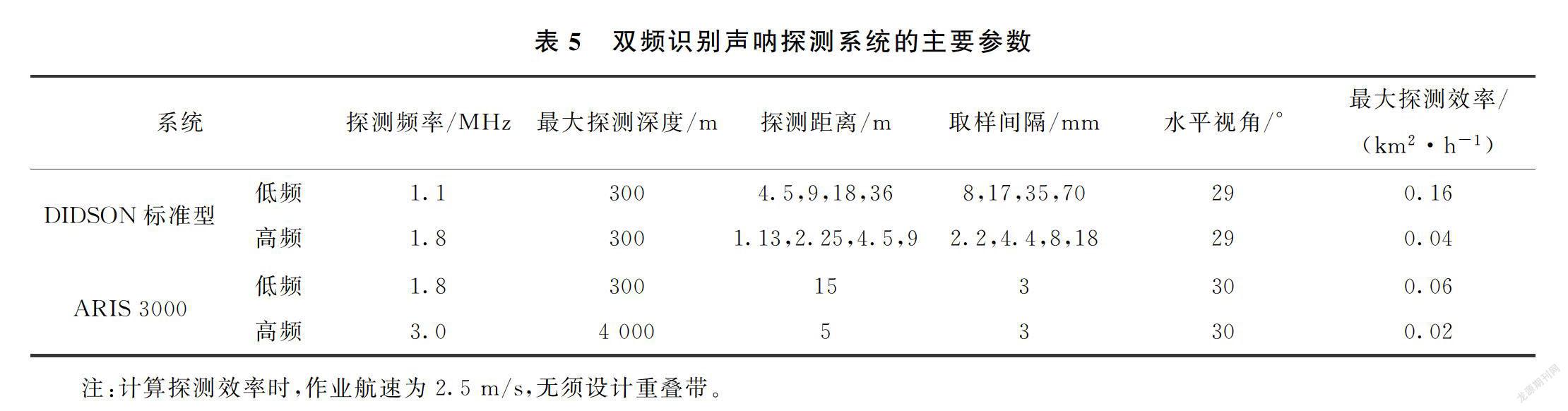
双频识别声呐具有较高的分辨率,利用声学透镜折射率大和聚焦短的特点形成较窄波束,最大限度地减小传播损失,可在能见度极低的水下生成接近光学照片的高质量图像,相当于高性能水下摄影机。常见的双频识别声呐探测系统如表5所示。
双频识别声呐探测系统在获取高精度和高分辨率水下地形地貌信息的过程中,对声呐信号的处理和分析尤为重要,其影响因素主要包括海水介质、海底底质、海面影响、环境噪声和设备条件等[18]。除尽可能地消除这些干扰外,对声呐数据的后期处理也是关键环节,可采用特征图像配准法[19]实现对图像的无缝拼接,使图像直观、清晰和完整。
受声呐有效作用距离和作业航速的影响,双频识别声呐探测技术适用于对确定目标的精确探测,而不适用于大范围和较粗略的目标探测。
1.6 合成孔径声呐探测技术
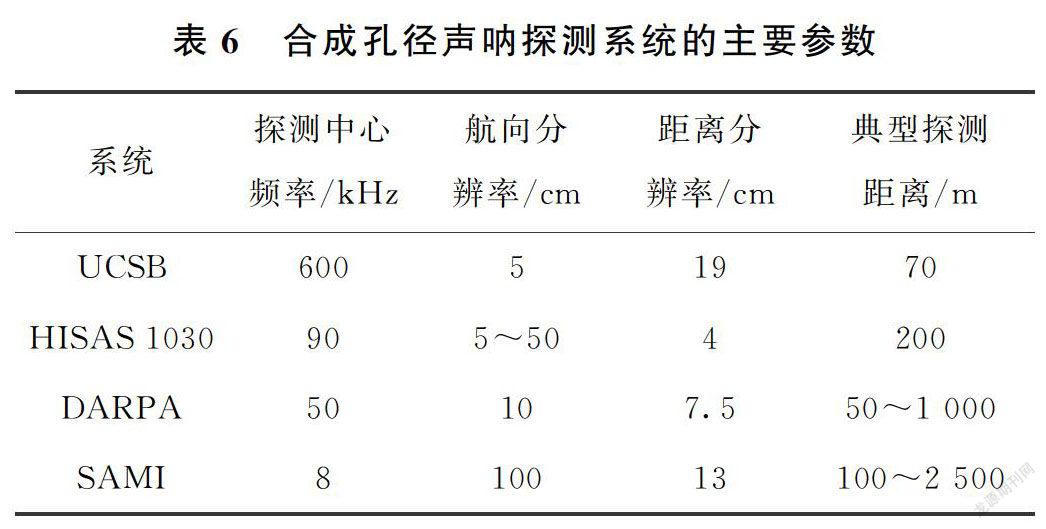
合成孔径声呐探测技术利用小孔径的声呐换能器阵,通过运动形成虚拟大孔径,经延时补偿生成较均匀的高分辨率图像,适用于对水下地形地貌的全覆盖探测,且可提取确定目标的精确信息和完成三维成像。由于合成孔径声呐的分辨率与探测频率和距离无关,可比常规声呐高出1~2个数量级。常见的合成孔径声呐探测系统如表6所示。
中国科学院声学研究所于2000年成功研发国内第一代合成孔径声呐。李海森等[20]研究多波束合成孔径声呐的机理,结合多波束探测技术和合成孔径成像技术,很好地解决了侧扫声呐探测精度较低和存在探测盲区等问题。
为获取高精度和高分辨率水下地形地貌信息,合成孔径声呐探测技术仍须改进,如:对于水声信道稳定性和时空相关性以及物体散射性等造成的干扰,可通过对目标回波信号的相位补偿减小或消除;对于载体平台,可通过惯性导航设备的姿态补偿以减小误差;对于较低的作业航速,可采用多重接收基阵提高探测效率;对于数据后期处理,须完善多子阵成像算法、运动补偿模型和自聚焦算法[21]。1.7 水下三维扫描声呐探测技术
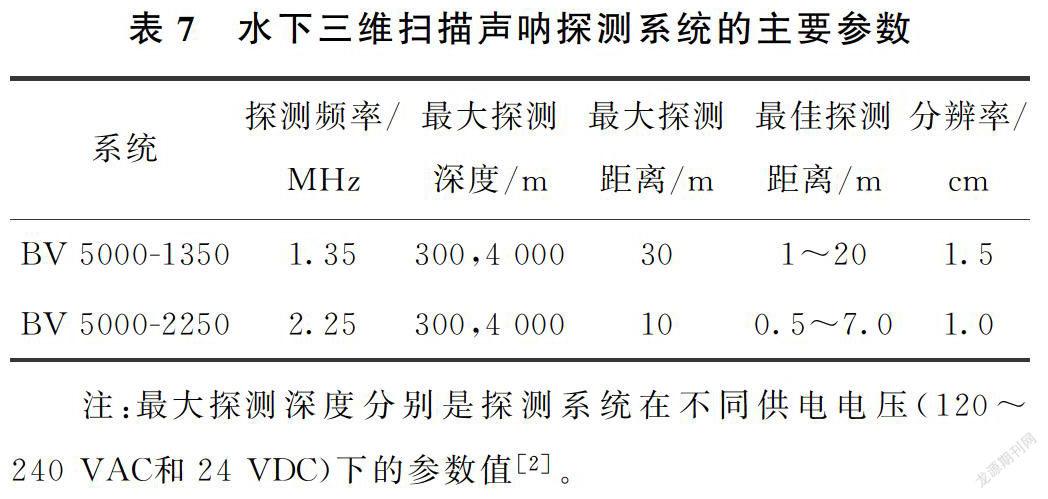
水下三维扫描声呐探测系统类似于三维激光扫描探测系统,但其利用声呐设备发射声线,通过对回波信号的接收和处理,实现三维成像和定位。与常规声呐相比,水下三维扫描声呐可在水下实时探测,并生成较完整、精确、清晰和立体的高分辨率三维图像;而与三维激光扫描相比,水下三维扫描不受水体能见度的影响,即可在能见度极低的情况下生成高质量图像[22]。常见的水下三维扫描声呐探测系统如表7所示。
通过水下三维扫描声呐探头的转动,可实现水平方向360°和竖直方向130°的立体扫描探测[2],获取高精度和高分辨率的水下地形地貌信息,但须关注声呐设备的固定和声速剖面的精度补偿。
2 探测平台
常规的船载式探测不能最大限度地发挥探测设备的优势和性能,在中深层水域探测中的劣势尤其明显。为解决这一问题,一系列探测平台不断涌现。
2.1 无人船
载人船通常不便进入浅层水域和岛礁区水域,而无人船可通过搭载单波束探测仪、浅水多波束探测仪和侧扫声呐等设备,与母船协同作业,高效完成探测任务。无人船的探测效果取决于其搭载设备的性能,通过对数据的后期处理,获取高精度和高分辨率水下地形地貌信息。
随着定位、导航、控制和自动化等技术的快速发展,无人船可通过遥控或自主的方式,连续走航式探测水下地形地貌。由于无人船具备自动GPS导航和自动规避障碍物等功能,可提前设定或随时接收探测任务,随后自动完成任务,极大地保障工作人员的安全和效率。
2.2 水下机器人
水下机器人是水下地形地貌探测的重要平台,具有中深层水域探测优势,主要分为无缆自治潜水器(AUV)、载人潜水器(HOV)和缆控潜水器(ROV)。
水下机器人可作为搭载各种设备的移动平台,获取高精度和高分辨率水下地形地貌信息,其性能主要体现在下潜深度、续航时间和航行速度等方面。目前水下机器人的最大下潜深度可达6 000米级(AUV)、7 000米级(HOV)和11 000米级(ROV),提高续航能力是关键技术之一。
2.3 海底观测网
通过在海底铺设以光缆和接驳盒连接的传感器,形成海底观测网,从而实时、在线和长期探测海底地形地貌和监测海洋环境[22]。其中,采用光-电复合缆连接海底观测设备和陆地基站的海底观测网,适用于离岸较近的海域,具有数据传输较快的优势,但造价较高;无缆连接的海底观测网通过电池供电,并通过海面浮标发送卫星数据,适用于离岸较远的海域,且造价较低,但电力供应和数据传输受限较大。
海底观测网可为其他探测技术提供基站,如为水下机器人提供中转平台和蓄能服务等,实现大范围、长期性和立体化的海底地形地貌探测。
3 结语
为满足军用或民用需求,开展高精度和高分辨率水下地形地貌探测研究具有重要的战略意义和广阔的应用前景。未来应重点发展多维度、多设备、多来源和多手段的探测技术,尽可能真实、完整、全局和精确地反映水下地形地貌,为进一步的研究和应用提供可靠的数据支持。
参考文献
[1] CRAIG J B,BRIAN J T,VLADIMIR E K,et al.Image-based classification of multibeam sonar backscatter data for objective surficial sediment mapping of Georges Bank[J].Continental Shelf Research,2011,31:110-119.
[2] 吴自银,阳凡林,罗孝文,等.高分辨率海底地形地貌:探测处理理论与技术[M].北京:科学出版社,2017.
[3] 刘基余,李松.机载激光测深系统测深误差源的研究[J].武汉测绘科技大学学报,2000,25(6):491-495.
[4] 刘焱雄,郭锴,何秀凤,等.机载激光测深技术及其研究进展[J].武汉大学学报(信息科学版),2017,42(9):1185-1194.
[5] 王越.机载激光浅海测深技术的现状和发展[J].測绘信息与工程,2014,39 (3):38-42,67.
[6] 黄谟涛,翟国君,欧阳永忠,等.机载激光测深中的波浪改正技术[J].武汉大学学报(信息科学版),2003,28 (4):389-392.
[7] 胡善江,贺岩,陈卫标.机载激光测深系统中海面波浪影响的改正[J].光子学报,2007,36 (11):2103-2105.
[8] 欧阳永忠,黄谟涛,翟国君,等.机载激光测深中的深度归算技术[J].海洋测绘,2003,23(1):1-5.
[9] 成芳,刘雁春,肖付民,等.基于IHO S-44不同测量等级的船速控制研究[J].海洋测绘,2010,30(6):12-14.
[10] 陆秀平,黄谟涛,翟国君,等.多波束测深数据处理关键技术研究进展与展望[J].海洋测绘,2016,36(4):1-6,11.
[11] 赵建虎,周丰年,张红梅,等.局域空间声速模型的建立方法研究[J].武汉大学学报(信息科学版),2008,33(2):199-202.
[12] 丁继胜,周兴华,唐秋华,等.基于等效声速剖面法的多波束测深系统声线折射改正技術[J].海洋测绘,2004,24(6):27-29.
[13] DEBESE N.Bathymétrie sondeurs traitement des données modèles numériques de terrain cours et exercices corrigés[M].Paris:Ellipse Edition Marketing S,A,Technosup,2013.
[14] 吴自银,金翔龙,郑玉龙,等.多波束测深边缘波束误差的综合校正[J].海洋学报,2005,27(4):88-94.
[15] 王润田.海底声学探测与底质识别技术的新进展[J].声学技术,2002,21(1):96-98.
[16] 丁维凤,苏希华.声学地层剖面野外数据采集几个关键问题的解决[J].海洋学报,2014,36(1):119-125.
[17] 赵铁虎,张志珣.浅水区浅地层剖面测量典型问题分析[J].物探化探计算技术,2002,24(3):215-219.
[18] 黄东武,李宝森.水下机器人双频识别声呐系统应用研究[A].第二十一届海洋测绘综合性学术研讨会论文集[C].2009:620-624.
[19] 陈星辰,陈斌.双频识别声呐水下影像监测系统及其应用[J].中国水能及电气化,2015 (11):22-25.
[20] 李海森,魏波,杜伟东.多波束合成孔径声呐技术研究进展[J].测绘学报,2017,46(10):1760-1769.
[21] 张春华,刘纪元.合成孔径声呐成像及其研究进展[J].声纳技术及其应用专题,2006,35(5):408-413.
[22] 李斌,金利军,洪佳,等.三维成像声纳技术在水下结构探测中的应用[J].水资源与水工程学报,2015,26 (3):184-188.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28 08:22:08
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
舰船科学技术(2022年11期)2022-07-15 07:54:04
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
声学与电子工程(2017年1期)2017-06-22 11:30:01
声学与电子工程(2017年1期)2017-06-22 11:29:56
声学技术(2014年1期)2014-06-21 06:56:34
声学技术(2014年1期)2014-06-21 06:56:32
中国科技术语(2014年7期)2014-04-29 02:44:21