
基于超声波的管道测厚行走装置的设计
2019-09-10 07:22李庚王军民吕志杰李方旭晏宇唐银海
河南科技 2019年7期
关键词:无线传输
李庚 王军民 吕志杰 李方旭 晏宇 唐银海

摘 要:本设计主要利用Arduino软硬件开发平台,通过上位机对装置实现前进、后退及其他元件的操作,将测得数据通过无限通信模块进行传输,并将测得的数据以txt的文本格式存储在SD卡上。该装置可以在恶劣的环境下代替人进行测厚工作,具有良好的应用前景。
关键词:Arduino;上位機;无线传输;测厚
中图分类号:TE973 文献标识码:A 文章编号:1003-5168(2019)07-0051-03
Abstract: This design mainly usedArduino software and hardware development platform to realize the operation of forward, backward and other components through the upper computer. The measured data weretransmitted through the infinite communication module, and stored on the SD card in the text format of txt. The device can measured thickness instead of human in harsh environment, and has a goodapplication prospect.
Keyword: Arduino;host computer;wireless transmission;thickness measurement
近几年来,无损检测技术不断发展,使得超声高频反射技术已经引起了各行各业的广泛关注。因为超声波能够穿透非常多的部件,所以可以运用超声波检测技术让这些部件内部构造的特征轻易呈现。超声检测技术其实就是把无形的东西转换成可以识别的图形,进而使部件内部的结构特征能够让人们通过图形观察出来[1]。传统的超声波测厚仪应用广泛,如石油化工业、电站、汽车制造、机械制造业,可以测量船壳、甲板、锅炉、管道、储油罐、轨道[2]。本文主要对传统的手持测厚仪的方法进行改进,设计了一种基于Arduino单片机的管道测厚行走装置。该设计主要以Arduino单片机为控制核心,同时以串口HMI作为上位机,并配备无线通信模块,在使用的过程中可以通过上位机对行走装置进行监测和控制,该装置具有操作便捷、稳定性好等特点。
1 系统设计
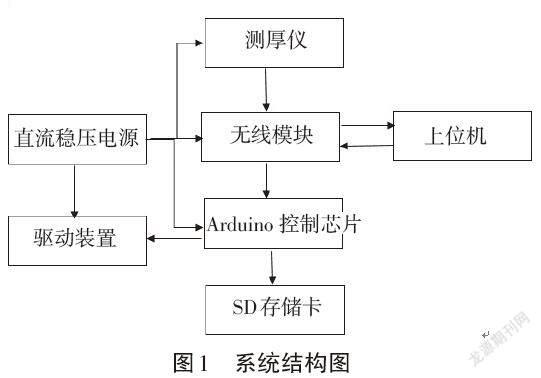
如图1所示,该系统结构框架图主要由以下几部分组成:直流稳压电源、驱动装置、测厚仪、无线模块、Arduino控制芯片、SD存储卡及上位机。工作原理是操作命令由上位机给出,通过无线模块将其命令传递给Arduino控制芯片,Arduino通过控制指令使行走装置实现各种位移功能,同时通过命令使测厚仪装置将测出的数据也通过无线模块传递给Arduino控制芯片,最后通过命令将其保存在SD卡上。
2 硬件部分
2.1 Arduino
Arduino开发板(见图2)是一款开源的单片机开发平台,是基于Lunix内核来实现的,主要由一块AVR单片机、一个晶振和一个5V直流电源,外加各类接口构成[3]。开发板与计算机程序进行交互是通过USB数据接口实现的。在官方IDE中编写程序代码后进行修改,直至无错误后将程序通过USB接口上传到Arduino开发板,开发板上的单片机进行程序的执行与数据的处理。
2.2 驱动装置
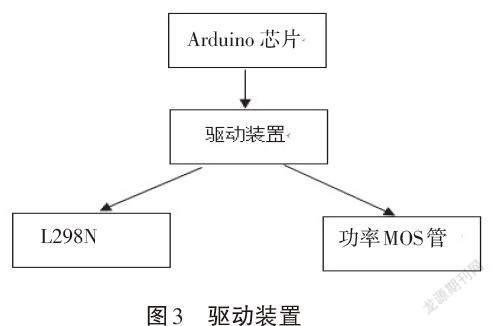
如图3所示,通过Arduino实现对行走驱动装置的控制,而行走装置主要依靠L298N电机以及MOS管驱动。
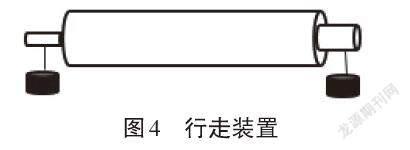
行走装置(见图4),主体是一个凸出可以自由伸缩的细管,在管的顶端和该主体的尾端各自接上圆弧形的磁铁,使其完全贴合要测管道的内壁。该行走装置主要通过L298N与大功率MOS管实现位移以及停止的操作。
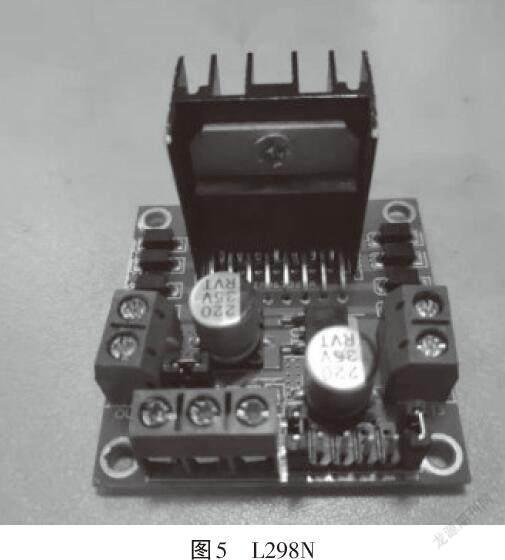
L298N(见图5)内置的两组H桥用来维持电机两端的电压始终处于高低电平之间,该模块的两种供电模式不仅可以供电给开发板,还可以驱动和控制两路电机,当使能端ENA、ENB处于高电平或者低电平状态时,对于L298N电机引脚N1、N2,不同的接法会形成不同的组合,电机也就会处于不同的状态,这样便可以对行走装置进行位移操作[4]。
功率MOS管一般采用N沟道增强型垂直式结构,在漏极区都有一个n-的漂移区,n-的漂移区的掺杂浓度比p基极区小,所以,当正电压加于漏极上时,漏极p基极被反向偏压,大部分的耗尽区宽度将跨过n-的漂移区。因为,在偏移区内形成电流的电子全部是多子,所以在高阻的n-区不会出现两种载流子泛滥的情况。因此,功率MOS管是一个单极型元件[5]。
2.3 无线模块
数据无线传输模块使用的是一款基于100MW的无线数传,工作在2.4~2.518GHz频段,使用串口进行数据收发,降低了无线应用的门槛;其功率密度集中,传输距离远、速率高,且全双工,可以双向同时通信,支持文件传输;TTL电平输出,兼容3.3V与5V的IO口电压[6]。
该模块的典型特点是高速传输,在多种波特率下,可以双向同时收发(全双工),传输的数据不限包长,支持不间断传输,支持文件传输。该无线传输模块有4种工作模式,是由引脚M0、M1的不同组合来进行设置。
2.4 测厚仪部分
超声波测厚仪的测厚原理就是超声波会通过超声波探头发射出去,在测量时将探头与被测物体贴合,在进行测厚时超声波探头会有波发射出去,由于超声波与光波类似,会有反射的特性,因此会有一部分的超声波反射回来,据此可以计算超声波探头发射波与反射波之间的时间差;同时,由于超声波在不同介质中的传播速度是已知的,这样就可以计算出被测物体的厚度[7]。根据超声波在不同介质中的传播速度以及反射波与发射波的时间差,就可以得出厚度的计算公式:
[H=12V×T] (1)
式(1)中,[H]表示最终计算的厚度值,[V]表示超声波不同介质中的速度,[T]表示两次的时间差。
2.5 SD储存卡
对测量的数据以txt的格式进行保存。
3 软件设计
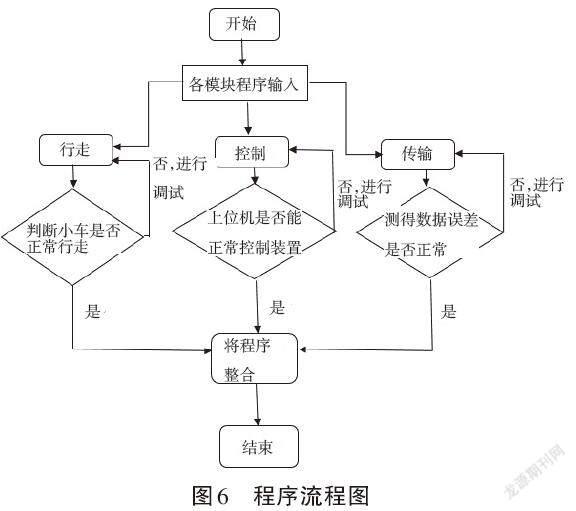
软件部分采用模块化设计,主要分为主程序、无线数据传输程序、小车运动控制程序,程序流程图如图6所示。前期将各个模块的代码导入Arduino控制板进行所写代码的功能测试,只有当行走、控制、传输模块的代码测试无误后才能进入下一步的代码整合测试,否则只能返回上一步进行Bug修改,直到代码测试正确为止。当所有模块的功能测试完成后,将其完整的程序导入Arduino进行最终的实践测试。
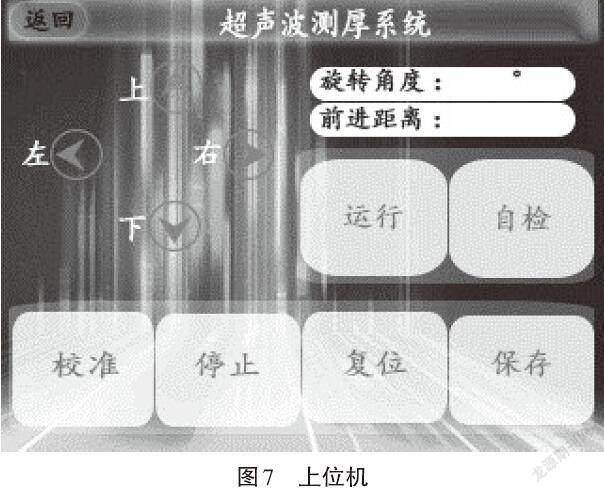
上位机的界面主要由USART HMI来实现的,HMI是Human Machine Interface的缩写,被称为“人机接口”,也叫人机界面。人机界面是系统和用户之间进行交互和信息交换的媒介,它实现了信息的内部形式与人类可以接受形式之间的转换[8]。HMI在日常生活中十分常见,它的主要特性可以通过软件配置把I/O配置成输入状态或输出状态,同时支持4种不同的通信接口(TTL、RS232、RS485、CAN),支持的接触类型有电容触屏与电阻触屏,它在通电进入工作状态时无需进行初始化设置,同时该界面不仅能提供用户时间存储空间,而且可以通过窗口的指令调整背光。设计的上位机如图7所示,为了实现该装置在实际的工作环境中的行走以及数据传输的功能等,该上位机的设计功能有行走的控制、前进距离的显示、校准、停止、复位、保存数据等功能。
4 总结
本设计只是对传统的手持测厚方案进行了改进,主要运用Arduino与无线模块,使测得的数据实现了无线传输,同时可以通过上位机对装置进行命令操作,从而完成测厚的操作,该系统操作界面简洁、操作方便,且体积小,便于携带。
参考文献:
[1]张旭辉,马宏伟.超声无损检测技术的现状和发展趋势[J].机械制造,2002(7):24-26.
[2]柯细勇,王占元,杨剑峰,等.一种新型便携式超声波测厚仪的设计[J].传感器与微系统,2011(12):119-122,125.
[3]古训,张仁兴.多功能智能导盲手杖设计与实现[J].贵阳学院学报,2016(4):40-45.
[4]张天鹏,徐磊.L298N控制直流电机正反转[J].工业设计,2011(3):98-99.
[5]沈昂.大功率电源MOS管的特性及应用[J].上海计量测试,2005(6):28-29.
[6]郭京波,张潮,赵伟行,等.基于nRF24L01无线模块的消防泵巡检监测系统設计[J].消防科学与技术,2018(9):74-77.
[7]高江磊.基于FPGA的超声波隔油测厚系统的设计[D].石家庄:河北科技大学,2015.
[8]刘寺杰,徐敏,张晨宇,等.基于HMI智能串口屏显示的温湿度测量系统[J].科教导刊(下),2018(8):59-60.
猜你喜欢
物联网技术(2016年12期)2017-01-21
软件导刊(2016年12期)2017-01-21
东方教育(2016年9期)2017-01-17
计算机时代(2016年12期)2017-01-14
科技创新与应用(2016年34期)2016-12-23
中国新通信(2016年16期)2016-10-18
