由激光扫描点云数据建立飞机叶轮三维模型的方法研究
2019-09-10 00:41沈永华倪俊芳
E动时尚·科学工程技术 2019年19期
关键词:逆向工程
沈永华 倪俊芳
摘 要:逆向工程是现代工业产品设计,加工和创新的一种新方法。本文研究和分析了逆向工程过程中获取点云数据的方法,研究了通过叶轮激光扫描获得的点云数据的预处理和表面重建的过程,建立了叶轮三维模型的过程,结合飞机叶轮的反向示例,可以实现从点云数据到飞机叶轮的实体模型的建立。
关键词:逆向工程;飞机叶轮曲面;重构三维模型
引言
叶轮是指带有活动叶片的转子,叶轮的叶轮的组件,以及轮盘和已安装的旋转叶片的总称。叶轮可根据其形状以及打开和关闭条件进行分类,在飞机叶轮的设计中,由于叶轮平面的几何复杂性,在飞机叶轮的设计中,由于叶轮平面的几何复杂性,建立飞机叶轮的三维模型成为一个费时,费力的工作,技术难度高。
逆向工程是一种工程方法,用于数据测量,拟合,CAD模型的重建,分析,设计的改进以及对现有物理原型的新产品开发的实现。它是近年来开发的一系列分析方法,用于消化和吸收先进的A应用技术的组合。它以现有产品或技术为研究对象,并以现代设计方法论,材料科学,工程学,计量学和其他相关理论知识为基础,分析和掌握关键形状和制造工艺技术,最终将实现实现物体的识别,复制和创造性发展。
传统上,飞机叶轮零件的建模是基于流体动力学理论作为建模的理论基础。对叶轮的吸力和压缩面进行了数值计算,并绘制了叶轮曲线方程来模拟表面。在设计的趾部,表面复杂,映射周期长,逐渐从叶片退出。历史舞台。为了减少叶轮设计的难度,现代设计在缩短开发周期,降低成本的基础上,试图提高叶轮设计的可靠性。逆向工程可以完美地解决叶轮的存在。很难使用轮廓的特殊复杂部分的映射,这很难表达其结构和尺寸问题,并且相对容易快速复制,优化和升级这些部分然后进行创新。
但是通过逆向工程获得的点云数据具有海量数据、处理时间长、局部数据缺失、高冗余、点密度稀疏、离散的特点。从解决实际工程应用方面考虑,本文利用激光扫描仪进行飞机叶轮点云数据采集,得到叶面上大量离散的点云数据并利用八叉树算法建立点云拓扑关系利于数据查询处理,通过对点云数据进行去燥,插补等数据处理,使得曲线更精确平滑,最后通过插补方法仿真生成叶轮曲面。
通过以上方法重构三维模型检测分析表明,基于八叉树与插补相结合的方法为激光扫描数据的叶轮重构提供了一种准确、快速的反求方法。这样得到计算机或数控设备易识别的飞机叶轮三维模型。
1 叶轮点云数据的获取
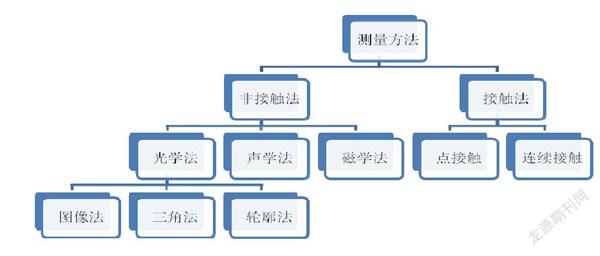
逆向工程中点云数据的获取,也称为目标对象表面的数字化,是指对象的每个表面上由测量设备或仪器测量的几组点的空间三维坐标数据某些测量方法。点云数据的采集是逆向工程的第一步,该技术的质量直接影响原型样品描述的完整性和准确性,从而影响最终构建的实体CAD模型的质量。随着诸如激光技术,传感技术和控制技术的相关技术的迅速发展,出现了各种数字测量方法。根据这些测量方法的特性和应用,它们通常可以分为两类:接触测量和非接触测量。图1显示了逆向工程中常用的测量方法的分类。根据测量对象和应用的不同,不同的测量方法将产生重大差异。使用哪种测量方法取决于物体表面的形状,测量速度,精度要求,零件的复杂性以及其他因素。
接触测量包括点触发数据采集和连续数据采集。点触发数据采集,例如普通的三坐标测量机测量,其采集速度较低,通常仅适用于零件的表面形状检测,或表面数字化需要较少数据的场合;连续数据采集,例如接触式扫描测量它的采集速度很快,因此可以收集大规模数据测量,接触测量使用探针直接接触工件表面,其测量精度与工件表面的颜色,曲率和反射特性无关,由于接触式探针技术的发展已经成熟,接触式测量方法具有精度高,操作简便,抗干扰性好,成本低的特点。但是,它也有缺点,例如损坏了工件某些重要部分的表面精度,补偿了探针半径以及测量速度慢,非接触式测量方法包括扫描测量,激光三角测量,快速轮廓视觉测量等,非接触式测量不需要与被测物体的表面直接接触,并且收集的数据会通过诸如光,声波或电磁场之类的介质传输,非接触式测量的精度主要取决于传感器的灵敏度,飞机叶轮的点云数据可以通过非接触式和接触式采集数据的组合获得。采集顺序为:首先采用接触数据采集方法,获得飞机叶轮表面轮廓主要可测尺寸的点云数据,然后,通过使用非接触式测量方法,很难直接测量飞机叶轮的点云数据的一部分,由于飞机叶轮的轮廓更加复杂,因此很难在同一坐标系中测量工件的所有完整點云数据。因此,飞机叶轮应分为几个要测量的区域,以便于测量,并且可以移动CMM测量机或工件,获取不同方向的工件3D点云数据,然后将多视图数据对齐以构造飞机叶轮的完整点云数据。为了便于随后的数据对齐,在实际测绘过程中,应将一定数量的标签参考点连接到要测试的飞机叶轮表面。使用光学非接触式测量时,测量光可能无法到达工件的某些表面,并且缺少某些几何特征信息,从而导致不完整的点云数据采集,因此,有必要调整工件的位置并转动测量臂以找到最大的位置。良好的测量角度,避免测量盲角。同时,应将工件放置在光线不太亮的地方,以防止测量时产生噪音。另外,为了防止工件的反射系数影响数据采集,有必要在工件表面上施加白色显影剂以达到获得高质量点云的目的。
2 云数据预处理
扫描采集得到的点云数据,称为原始数据,它含有大量冗余数据而且分属于独立的各测站。因此需要进行预处理,预处理后的数据数量变少、质量提高,便于下一步操作处理,预处理流程如下所示。
(1)点云去噪,可以通过人机互助的方式将明显噪声点云数据除去,常用的软件有Cyclone、Geomagic Studio、Ployworks等;(2)点云数据拼接,通过扫描仪自带的软件结合标靶数据,将各站的数据拼接到一起;(3)坐标系统一,通过点云数据拼接把各站坐标系统一成为一个坐标系,这个坐标系可以是某一站的独立坐标系或者是与当地联测的地方坐标系;(4)数据简化,由于点云数据量大,加上拼接后产生冗余数据,因此需要对数据进行简化,常用的简化算法有:包围盒算法及改进算法、基于扫描线的数据压缩算法、减少模型中多边形数量的方法。数据简化可以通过点云数据处理软件完成如Geomagic Studio,或者通过算法编程实现。
3飞机叶轮三维建模
以预处理后点云数据为基础,飞机叶轮三维建模的方法主要有三种,即几何建模、三角网建模、曲面建模,下面分别用不同方法进行建模。
3.1 几何建模
几何建模是将飞机叶轮的轮廓线构成线框模型或者实体模型,目前常用的建模软件为Auto-CAD、3dsMax,几何建模基于这两种软件进行三维建模。以AutoCAD为平台的建模方法,其主要过程为:(1)将点云数据进行分割,以*.dxf格式分块输出;(2)在AutoCAD软件中提取飞机叶轮轮廓线上的扫描点,将这些点拟合成轮廓线或者先拟合成平面,然后从相邻两个平面中提取轮廓线;
(3)利用提取的轮廓线组合成三维线框模型,然后用相关操作命令生成三维实体模型。以3dsMax为平台的建模方法主要过程为:
(1)在Cyclone软件中量取飞机叶轮各个构件的三维尺寸,生成二维线划图;
(2)将二维线划图导入到3dsMax软件中,对于比较规则的部分,使用线性回归分段拟合的方法进行建模;对于不规则部分使用旋转、放样、拉伸等方法建模。几何建模一般对规则飞机叶轮进行平面拟合效果较好,而对于不规则飞机叶轮的曲面拟合效果不好。
3.2 三角网建模
三角网建模是一种三维表面模型重建方法,由于点云数据是离散的、不规则的、拓扑关系不明确的,不能直接构成物体真实表面,因此需要将点云数据构造成网格,然后得到构成拓扑关系的真实表面,最后得到物体的三维表面模型。
构造成网格的算法有很多种,常见的且有效的是Delaunay三角剖分法,点云数据处理软件Geomagic Studio、Ployworks等
基于此方法构成三角网模型。
3.3 曲面建模
曲面建模是指用样条曲面为基础的建模方法,常用的曲面拟合算法有NURBS曲面算法、Bezier曲面算法、B样条曲面算法,其中NURBS曲面具有良好的曲面质量,它既能表示自由曲线曲面,也能表示规则曲面,利用NURBS算法进行建模步骤为:
(1)利用拓扑关系明确的几何信息,将离散点拟合成曲线或者从三角网模型中提取轮廓线;
(2)以拟合成的曲线或提取的轮廓线为基础,将其拟合成曲面片,进而构成曲面网格;
(3)在网格的基础上,将曲面片拟合成NURBS曲面,由曲面构成立体模型。基于NURBS曲面建模方法构建的模型比较逼真,主要应用在逆向工程建模、雕塑建模中,其算法虽然复杂,但在常见的点云数据处理软件中也能实现,是目前使用较为广泛的方法。
4 曲面重建
可以将复杂的CAD3D模型的表面视为具有单个特征的多个简单面的组合。对工件的原型进行数字处理,以形成一系列随机排列的空间离散点,在CAD模型中,通常根据原型的特征将数据点云划分为不同的区域,然后分别拟合不同的曲面段,最后采用面间过渡或曲面相交的方法,缝合在一起形成一个完整的整体。
通过点云数据创建表面的方法通常分为两种:一种是近似方法,另一种是插值方法,以将以一定顺序排列的点云数据建立到曲面中。在以近似方式重建曲面时,必须首先指定一个允许的误差值,确定U和V方向上控制点的起始数量,以最小二乘方拟合曲面,然后将测量点投影到曲面上。点到表面误差测量误差量的结果在指定的允许误差范围内,以完成表面模拟。当测量的数据和指定的公差较小或较密时,该操作可能会非常耗时,使用近似拟合曲面的优势在于,拟合曲面不需要通过每个测量点,因此对测量期间生成的噪声点具有抑制作用。插值方法的结果是,获得的点方法,然后使用曲线建立曲面。另一方面,如果點云数据包含大量噪声,则这些噪声点也位于平面的平面上,这会导致较大的误差。在曲面重建过程中,应根据测得的点云数据数量和精度要求确定方法。叶轮更为复杂,属于自由曲面,NURBS和三角形Bézier曲面是自由曲面重建中常用的参数化建模方法,自由曲面直接与点云数据拟合,生成的曲面趋于具有凹凸不平和扭结,不适合后续处理,在飞机叶轮表面重构的处理中,可以从点云中分离出单个曲线点云,然后继续进行曲线拟合,以获得更高质量的边界曲线,并使用边界曲线拟合表面以生成表面形状飞机叶轮。最后,使用表面检查工具检查生成的表面。如果曲面和点云的误差较大,并且精度未达到Met,则需要调整曲面的控制点。在调整过程中,表面可能会出现诸如不均匀和起皱的现象,因此需要短暂的调整时间。
5 结论
逆向工程正被用作产品设计,开发和创新的新方法,并已越来越多地应用于机械工程领域。本文分析了逆向工程中点云数据采集,数据预处理和曲面重构的关键技术。研究了通过激光扫描获得的离散点云三维模型的建立方法,并采用了飞机叶轮三维模型。重新建立的示例验证了该方法的可行性和有效性。
猜你喜欢
中国教育技术装备(2017年2期)2017-04-08
中国市场(2017年7期)2017-04-01
教书育人·高教论坛(2017年3期)2017-03-21
科技视界(2016年27期)2017-03-14
无线互联科技(2016年13期)2017-01-10
电脑知识与技术(2016年18期)2016-11-02
科技视界(2016年22期)2016-10-18
中小企业管理与科技·中旬刊(2016年4期)2016-05-23
湖南大学学报·自然科学版(2015年10期)2015-11-30
科技与创新(2015年10期)2015-07-07