多传感器协同识别跟踪多目标管理方法
2019-09-10 00:52:24庞策单甘霖段修生
北京航空航天大学学报 2019年8期
庞策,单甘霖,*,段修生
(1.陆军工程大学石家庄校区 电子与光学工程系,石家庄050003; 2.石家庄铁道大学 机械工程学院,石家庄050043)
在目标探测过程中,如何寻找一种有效的传感器管理方法使传感器网络发挥最大效用,一直是军事方面研究的热点和难点问题。目前,主要存在3类基于贝叶斯理论的传感器管理方法,即:基于任务的传感器管理方法[1-3]、基于信息论的传感器管理方法[4-6]、基于风险理论的传感器管理方法[7-9]。
在以往对传感器管理问题研究中,并不区分目标种类,而在对目标拦截的作战背景下,探明目标类型至关重要,因为针对不同的目标后应对措施也应不同,例如当目标为侦察机时,即可采取干扰措施也可发射导弹拦截,甚至在威胁不大的情况下保持一定预警即可,而当目标为导弹时,应发射导弹拦截。由此,针对不同目标探测情况下的代价函数[10]不同,传感器管理模型也应有所区别。此外,在目标来袭过程中,敌方会采取电子干扰等措施,探测到的目标中通常掺杂着虚假目标,在传感器资源十分珍贵有限的情况下,对这些目标探测必定造成资源浪费;此外,在判定来袭目标为导弹之后,应当通过武器系统对目标拦截,若对虚假目标拦截必定同时造成武器资源浪费。
本文主要研究传感器同时对目标识别跟踪背景下的传感器管理方法。首先建立风险理论、贝叶斯理论和证据理论的目标识别模型;随后考虑边跟踪边识别的情况,建立跟踪情况下的目标识别模型,并对模型进行理论分析,在模型求解过程中提出一种基于多Agent分布计算理论的分布式算法;最后通过仿真,验证了本文方法、模型和算法的有效性、可行性。
1 模型建立
1.1 目标识别模型
本文将风险定义为不确定性事件发生后带来的损失与该事件发生的概率乘积。将来袭目标分为两类,一类是具有攻击性的真实导弹目标C(1),另一类是虚假目标C(2)。当判定目标为C(1)时,我方将发射导弹拦截,则存在的风险为R(1)=c(1)p(2),其中,c(1)为发射导弹产生的消耗,p(2)为k时刻目标类型为C(2)的概率。当判定目标为C(2)时,存在的风险为R(2)=c(2)p(1),其中,c(2)为敌方导弹击中我方设施后带来的损失,p(1)为k时刻目标类型为C(1)的概率。
我方在作决策过程中,遵循风险最低原则,将风险定义为

对目标类型的判断为C=arg R。


在传感器si获得观测值后,si获得的关于k+1时刻目标tj类型的后验概率为

式中:K为证据之间的冲突概率。
1.2 目标跟踪模型
目标tj的运动状态状态转移矩阵为
式中:T为采样时间,本文取T=1 s。

在k+1时刻,目标tj的状态为式中:W 为过程演化噪声,为均值为0的高斯白噪声。
协方差矩阵为式中:σx、σy为噪声的功率谱密度。
在k时刻传感器si对目标tj的观测为

状态观测矩阵为

将上述极坐标转化为Cartesian坐标系坐标,有

对模型进行线性近似,观测矩阵为

此时,目标坐标协方差在Cartesian坐标系坐标中的协方差矩阵为

给定k=0时刻目标tj的初始状态Xj0,及其均值E()=u0,协方差矩阵P0=E[(-u0)·(-u0)T]。
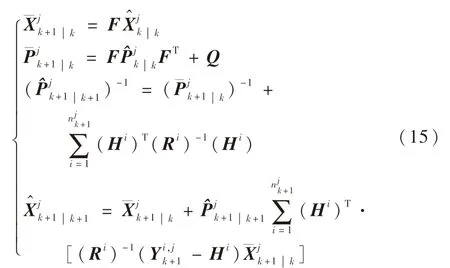
式中:Hi、Ri分别为传感器si观测矩阵、观测噪声矩阵。
1.3 传感器管理模型
目标识别的过程是在目标跟踪的过程中进行的,在目标跟踪过程中,存在目标丢失的风险,同时考虑目标跟踪与目标识别,建立风险函数,有
此时,有

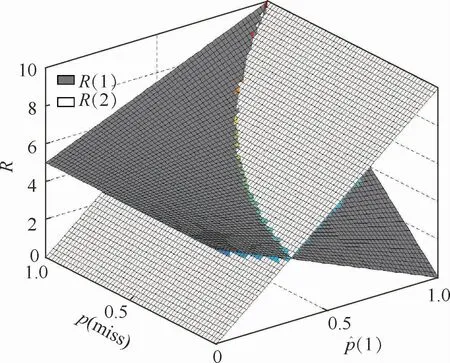
图1 风险值分析Fig.1 Analysis of value-at-risk
由图1可知,当目标为虚假目标时,即p(1)=0,无论目标丢失概率为何值,风险值均为0;当目标为导弹时,即p(1)=1,目标丢失概率越低,风险值越低;目标丢失概率越高,风险值越高,模型与实际情况相符。由式(16)和图1可知,当目标为真目标C(1)的概率较低(p(1)→0)时,风险主要来自目标识别,一旦将真目标判定为假目标,真目标击毁我方军事设施,将会为我方带来损失;当目标为真目标C(1)的概率较高(p(1)→1)时,风险主要来自于目标跟踪,此时将发射导弹对目标实施拦截,在跟踪精度较低,目标丢失概率较高的情况下,一旦拦截失败,依然会给我方带来损失;若 目 标 丢 失 概 率 较 高(p(miss)→1),则R(1)>R(2)恒成立,此时,不再发射导弹,由于目标跟踪精度较低,丢失概率较高,导弹命中率较低,使武器资源浪费。
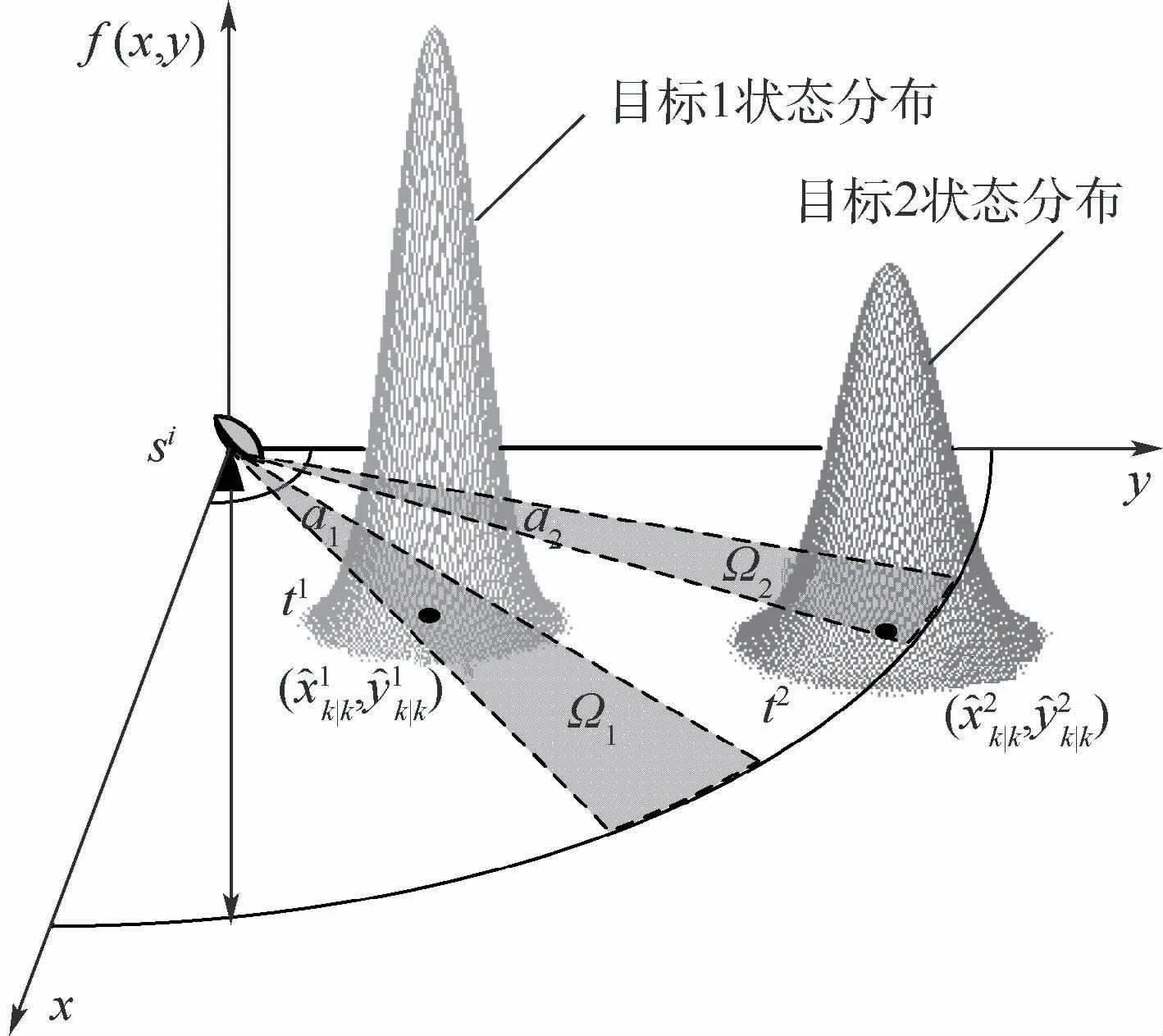
图2 目标丢失概率示意图Fig.2 Sketch map of target losing probability

2 模型求解及算法设计
用于求解传感器管理方案的算法主要有集中式算法和分布式算法两种[13-15],前者计算时间长、通信压力大,但求解质量高,后者计算时间短、通信压力小,但求解质量不如前者。由于传感器管理过程中作战态势变化较快,使用求解速度较快的分布式算法求解传感器管理方案,同时提高求解质量,成为研究的热点和难点。
本文采用分布计算的思想,其优化思路为将整体效能函数转化为单目标的局部效能函数,将每个传感器看作一个具有自主计算功能的Agent,每个目标通过分别优化自身局部效能,使局部效能最优的同时达到全局最优。


基于以上叙述,传感器管理流程如图3所示。
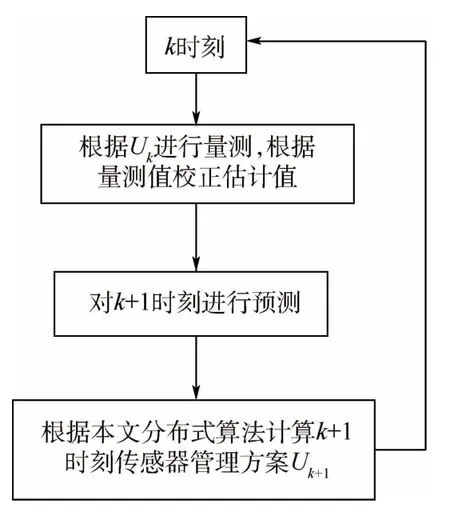
图3 传感器管理流程图Fig.3 Flowchart of sensormanagement
3 仿真实验
传感器的探测性能和目标参数如表1、表2所示,pf为传感器的误警率。我方用于目标跟踪的传感器为4个,在k=0时刻,同时探测到4个目标,假定目标飞行过程中均在所有传感器的探测范围内,作战态势如图4所示。
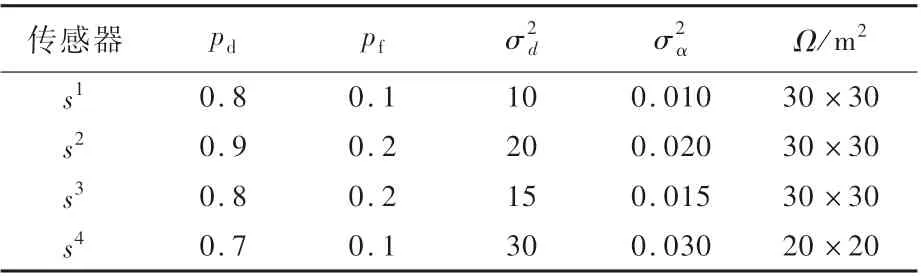
表1 传感器信息Tab le 1 In form ation of sensors

表2 目标信息Tab le 2 In form ation of targets
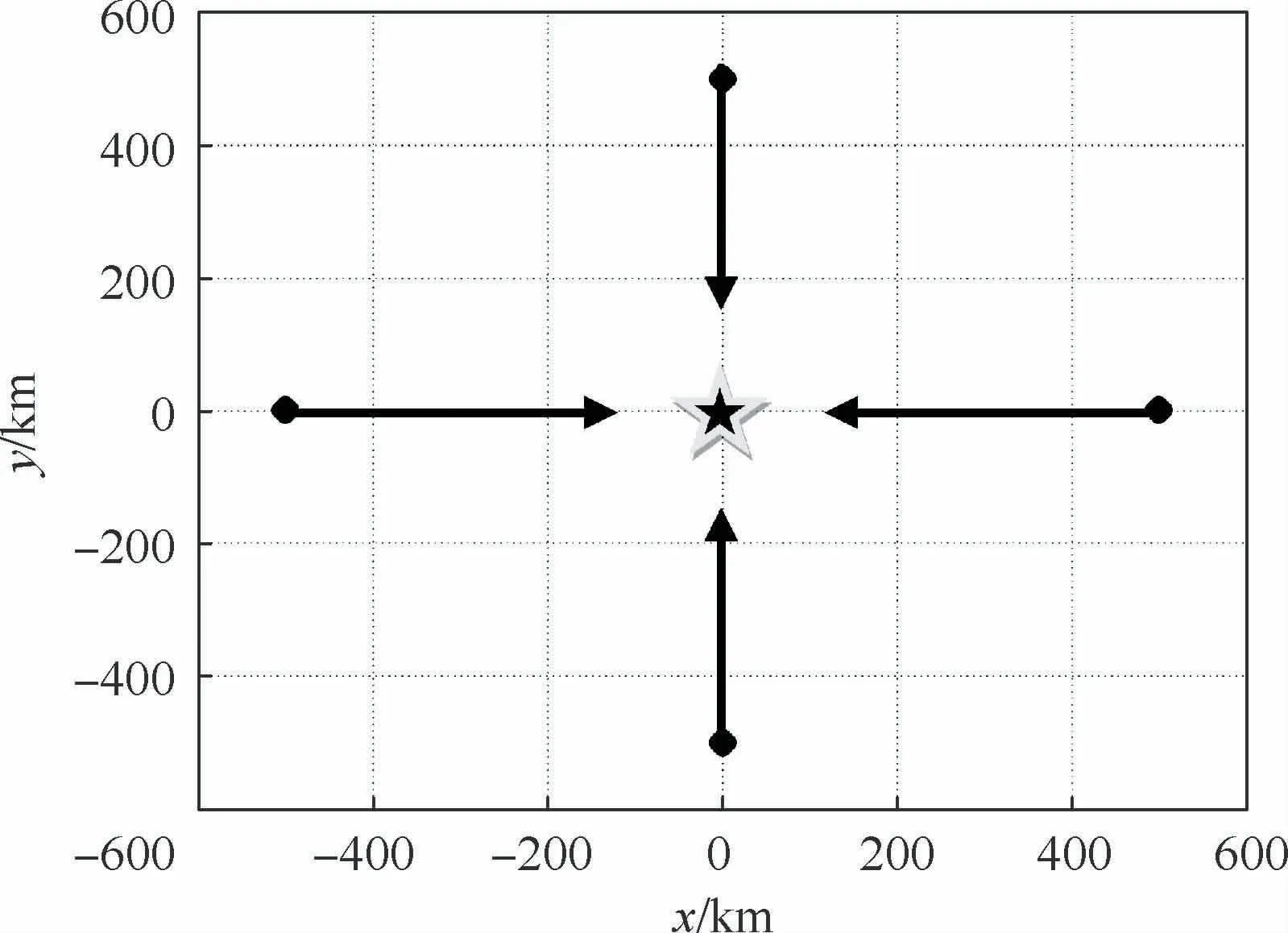
图4 作战态势Fig.4 Combat situation
3.1 目标识别过程仿真
当用传感器s1对目标t1跟踪识别时,取前30 s,其过程如图5所示。当用传感器s2对目标t3跟踪识别时,取前30 s,其过程如图6所示。
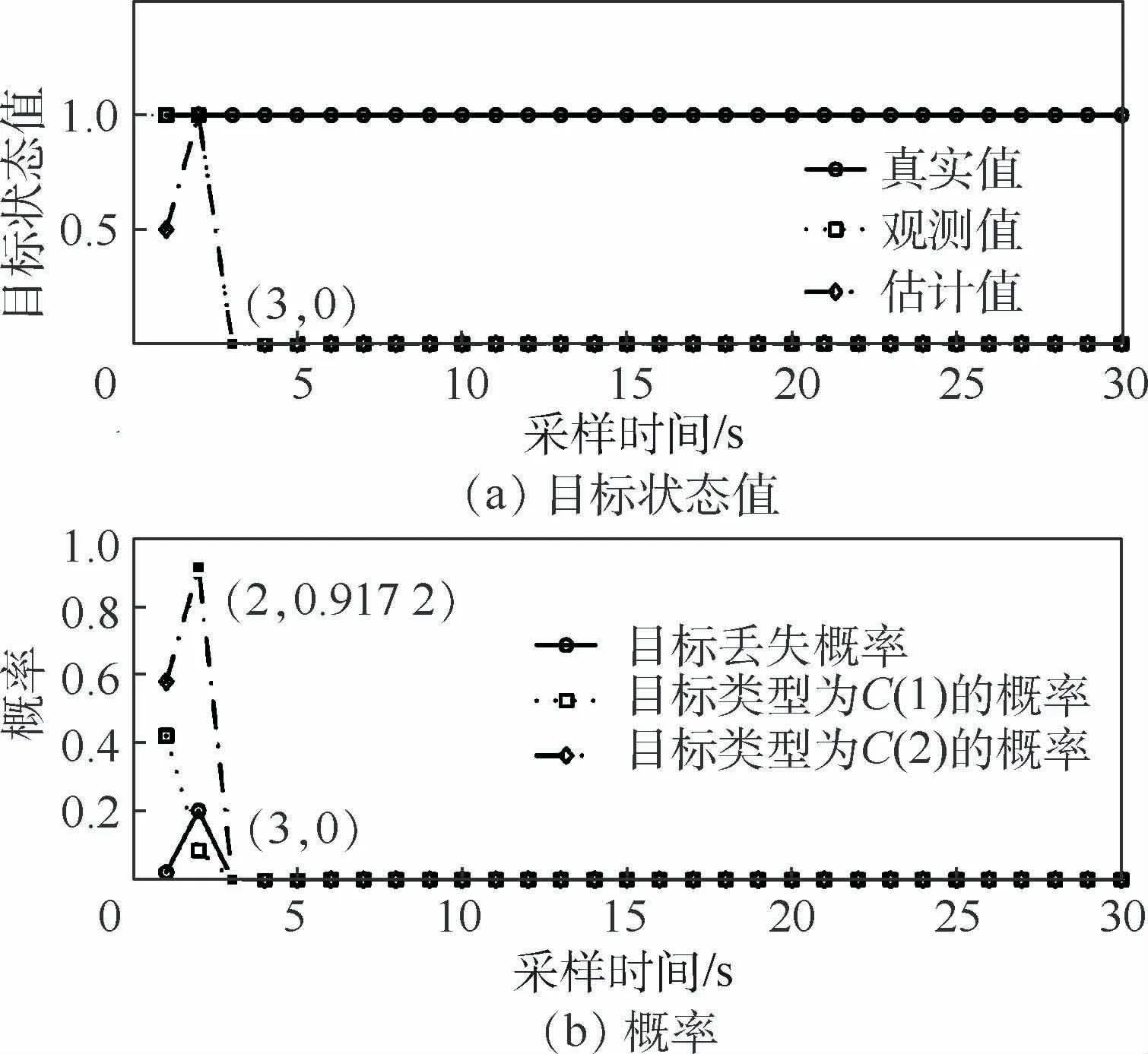
图5 传感器s1 对目标t1 的目标识别过程Fig.5 Process of target identification of sensor s1 to target t1
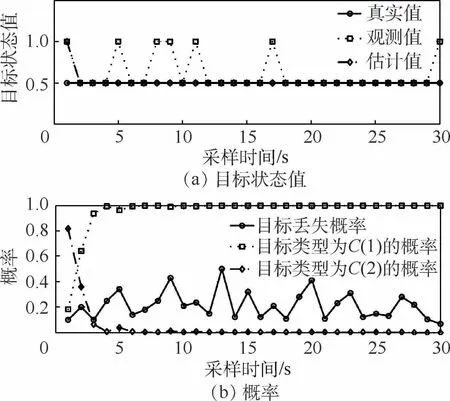
图6 传感器s2 对目标t3 的目标识别过程Fig.6 Process of target identification of sensor s2 to target t3
3.2 多传感器-多目标分配
在k=0时刻,生成k=1时刻的传感器-目标分配方案,以便后续时刻对目标进行跟踪。在仿真过程中,将本文提出的分布式算法与贪婪算法、拍卖算法作对比,如图7所示。
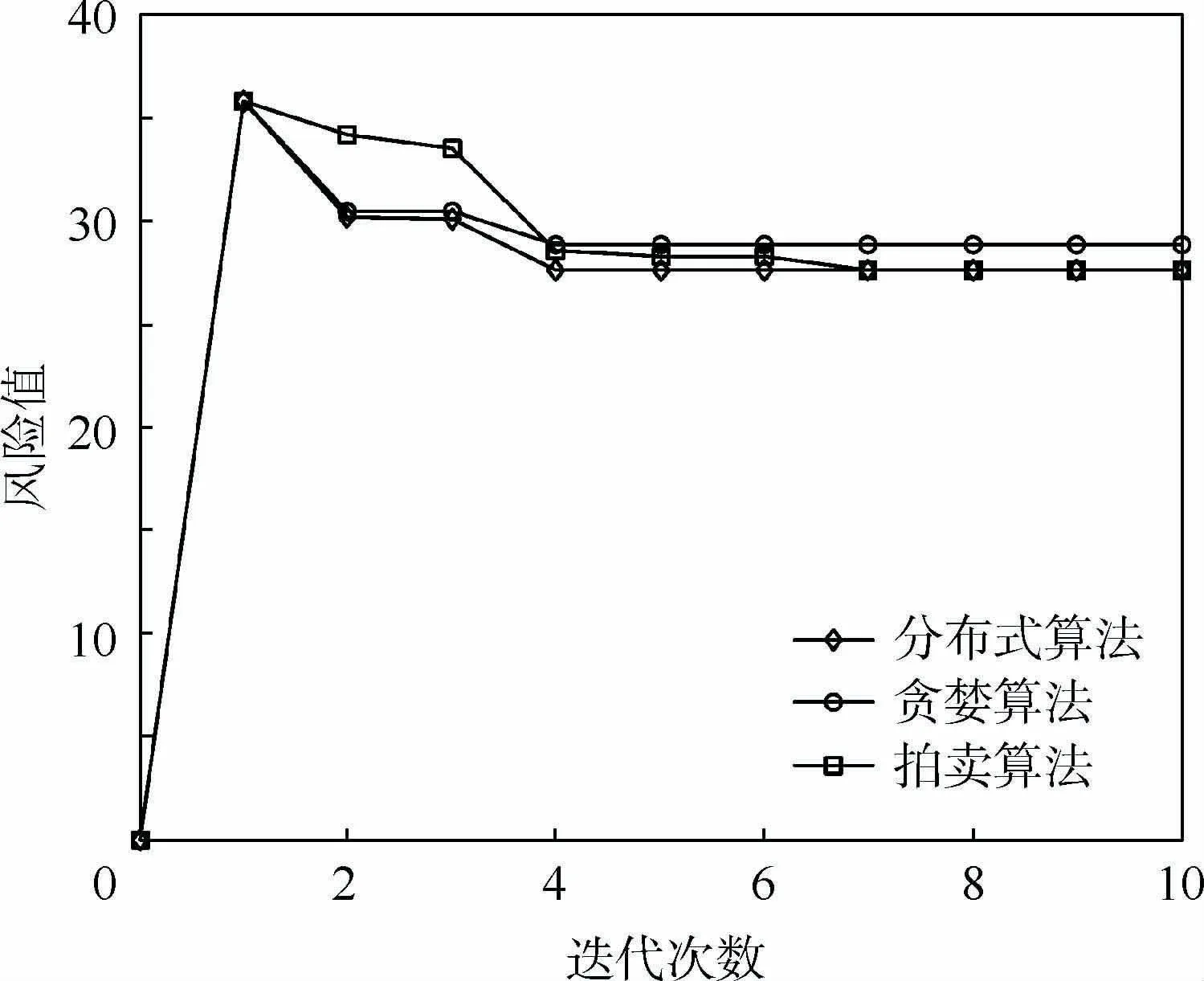
图7 算法对比Fig.7 Comparison of algorithms
由图7可知,与贪婪算法相比,本文算法求解质量较高;与拍卖算法相比,本文算法求解速度较快,说明本文算法具有良好性能。
3.3 本文方法与其他经典传感器管理方法对比
比较经典的传感器管理方法为基于协方差矩阵的传感器管理方法与基于信息论的传感器管理方法,本文分别选取基于跟踪精度控制的传感器管理方法[16](简称跟踪精度控制)和基于Rényi矩阵的传感器管理方法[17](简称信息增量控制)与本文方法作对比。分别计算3种传感器管理方法生成的传感器管理方案对应的风险值以及目标跟踪精度,其过程如图8所示。由图8(a)可以看出,风险值整体呈下降的趋势,由此可见,随着对目标的跟踪探测,对目标的识别风险和跟踪风险降低。在风险值方面,传感器管理方法的优劣依次为:本文方法>跟踪精度控制>信息增量控制。由图8(b)可以看出,虽然本文方法尚未采取跟踪精度控制的方法,但其获得的目标跟踪精度值最低,原因为在k=5时刻后,传感器不再对虚假目标t3、t4跟踪,节省出传感器资源对真目标t1、t2跟踪,由此避免了传感器资源浪费。而采用跟踪精度控制和信息增量控制的传感器管理方法,未考虑到跟踪目标的种类,一味追求对包括虚假目标在内的所有目标提高跟踪精度,由此造成了传感器资源浪费。该分析在图8(c)~图8(f)中得到证实。
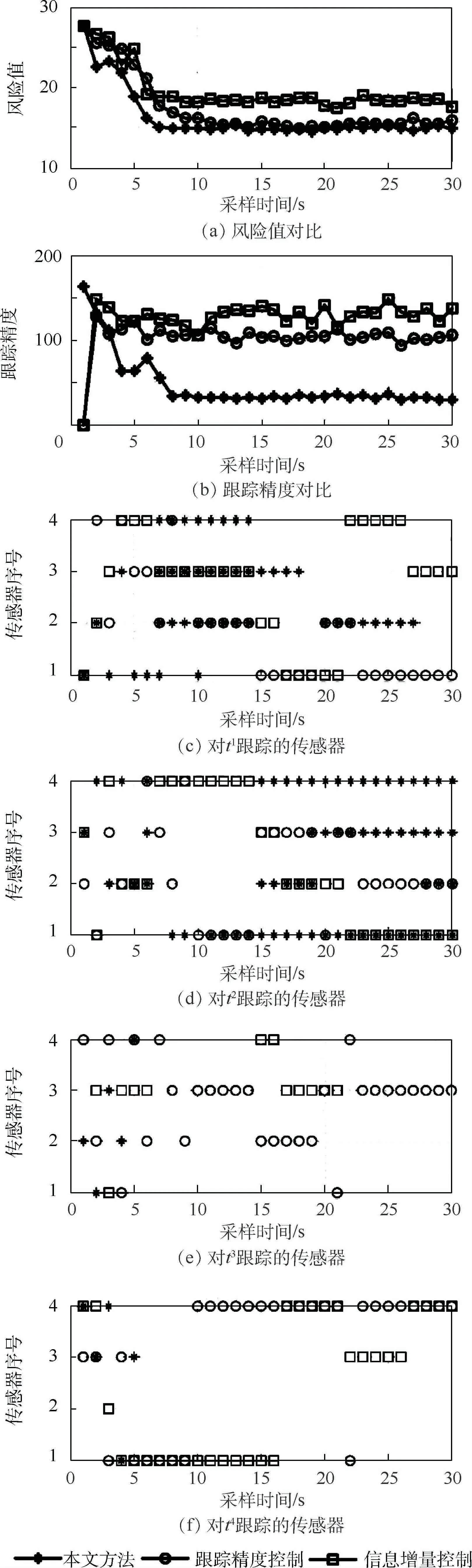
图8 传感器管理方法对比Fig.8 Comparison of sensor managementmethods
4 结 论
本文研究多传感器协同跟踪多目标作战背景的传感器管理问题,建立同时考虑目标跟踪和目标识别任务的传感器管理模型,并针对模型的求解提出基于多Agent分布计算理论的分布式算法,通过仿真验证了模型和算法的有效性,仿真结果表明,本文方法不但能够得到最低的风险值,还能及时停止对虚假目标跟踪,从而避免传感器资源浪费。在多目标跟踪情况下,伴随着已有目标的消失与新目标的出现,若在对目标数目估计不准确情况下对传感器进行管理,得到的传感器管理方案可能欠准确,下一步将研究此种情况下的传感器风险管理问题。
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05 06:49:10
纺织科学研究(2021年1期)2021-12-03 15:04:42
中学生数理化·中考版(2021年6期)2021-11-22 07:52:30
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
电子制作(2019年22期)2020-01-14 03:16:52
传媒评论(2019年5期)2019-08-30 03:50:18
时代英语·高一(2019年1期)2019-03-13 10:29:48
中央民族大学学报(自然科学版)(2016年3期)2016-06-27 07:55:32
南都周刊(2015年4期)2015-09-10 07:22:44