
农情监测多旋翼无人机系统开发及性能评估
2019-09-10 07:22朱姜蓬岑海燕何立文何勇
智慧农业(中英文) 2019年1期
关键词:路径规划
朱姜蓬 岑海燕 何立文 何勇












摘 要:现代农业要求农业生产者实时、准确、全面地了解农作物的生长环境和生长状态。与传统的人工田间调查方式相比,无人机是一种高效的农田信息获取平台。本研究将自主研发的八旋翼无人机与农田信息采集设备进行整合,形成了一套用于农情监测的无人机系统,实现了无人机按照预设航线自动巡航并采集农田遥感图像、地理位置信息以及环境照度信息。经测试,在飞行中,图像采集设备能够稳定维持垂直对地的姿态并进行拍摄,采集的数据能够拼接成完整的农田正射影遥感图像。测试结果表明研发的无人机系统能够满足低空农情监测作业要求。与商业化产品相比,该系统避免了因任务设备与飞机独立工作而导致重拍、漏拍的情况,实现了无人机与任务设备高效协同作业。
关键词:无人机系统;农情监测;遥感图像;自主飞行;路径规划;农田信息获取
中图分类号:S251 文献标志码:A 文章编号:201812-SA011
朱姜蓬, 岑海燕, 何立文, 何 勇. 农情监测多旋翼无人机系统开发及性能评估[J]. 智慧农业, 2019, 1(1): 43-52.
Zhu J, Cen H, He L, He Y. Development and performance evaluation of a multi-rotor unmanned aircraft system for agricultural monitoring[J]. Smart Agriculture, 2019, 1(1): 43-52. (in Chinese with English abstract)
1 引言
农业是我国国民经济建设和发展的基础产业[1]。现代农业要求农业生产者要实时、准确、全面了解农田中的农作物的生长环境和生长状态[2]。精准的农作物生长数据与农田环境数据能够为农田精细化管理提供有力的支持[3]。目前,传统的人工采样信息获取方式效率较低,很难满足对农田整体信息的获取。近年来,民用无人机技术发展迅速,飞行性能和安全性能逐渐成熟[4]。无人机遥感作业响应速度快、机动性好、效率高,在农业上的应用逐渐广泛[5]。因此,利用搭载轻量化数据采集设备的无人机在农田上空进行自主巡航飞行并获取农田信息是可行的解决方案。
国内外研究团队围绕无人机系统在农田信息获取方面的应用已开展了相关工作:Khan等[6]利用3D Robotics公司生产的四旋翼无人机搭载数码相机制成无人机系统对小麦育种进行监测;Flynn和Chapra[7]利用大疆公司生产的Phantom系列多旋翼飞机对藻类进行监测;Holman等[8]利用大疆公司生产的Wookong-M型多旋翼飞控系统制成多旋翼无人机搭载数码相机对小麦的株高及生长速度进行了监测,无人机监测农情研究取得了一定的进展。
然而,在上述的农情监测无人机系统应用中,一部分直接采用了大疆公司生产的Phantom系列等消费级航拍无人机来执行农情监测作业。以Phantom 4为例,其较低的图像分辨率以及图像畸变的影响使得该系统无法满足实际作业的需求。另一部分则存在任务设备与飞行器未完全整合的问题,飞机平台通常直接采用市场上已有的产品,如大疆公司的M600, S1000+多旋翼无人机。这种飞机的飞行控制系统无法与自行集成的任务设备进行信息交互,可能会造成如飞机已经飞离目标位置,任务设备却未能完成图像信息采集作业的情况,从而影响作业精度与效率。为进一步提升飞机与任务设备之间的工作协调性,本研究基于自行设计优化的飞控系统,开发了一套用于农情监测的八旋翼无人机系统,以飞控系统为核心,同时协调飞机飞行与任务设备作业,并对其在可见光波段下的农田正射遥感图像的采集进行了应用性能的评估。
2 系统概述
2.1 飞行器
飞行器是农情监测无人机系统的主要任务执行机构 。飞行器的系统组成如图1所示[9]。
2.1.1 飞机机架与动力装置
常用的多旋翼机架架构有四旋翼架构、六旋翼架构和八旋翼架构。与前两者相比,八旋翼架构的主要优点在于动力系统故障冗余足,安全性好,主要体现在当八旋翼无人机中的一个旋翼因为故障停转后,飞机依然能够维持较为稳定的飞行姿态完成飞行任务。因此本研究中,飞行器采用了如图2所示的八旋翼I型机架[10]。
在图2所示的机架中,机臂和飞行器中心板采用碳纤维复合材料,各种支撑用零部件,如电机支撑座,机臂固定环等采用铝合金材料。8个动力电机围绕飞行器中心板均匀对称地分布在8个方向上,相邻电机转向相反,用以平衡各个电机旋转时产生的力矩。电机上方安装有可快速拆卸碳纤维桨叶,在农田作业环境中能实现桨叶的快速拆卸以及检修更换。飞控系统通过实时控制8个电机的转速变化实现控制飞机的姿态与飞行动作[11]。
飞行器前向与机臂重合。飞控系统布置在飞行器中心板顶板的中心位,底部设计有四个减震球组成的减震装置,以减小飞行器震动对飞控系统的影响[12]。任务设备与飞行器刚性连接,固定于中心板正下方,从而形成一套完整的无人机系统。
2.1.2 飛控系统
在飞行器中,飞控系统的主要功能是控制飞行器姿态的稳定、管理无人机飞行和任务设备以及无人机应急处置等。其中,飞控系统的核心部件—飞控计算机主要由STM32F427芯片构成。飞控系统架构如图3所示。
飞控系统中的传感器元件包括全球卫星定位模块、惯性导航单元、电子罗盘和气压高度传感器。
全球卫星定位模块采用NEO-M8N模块,在铝合金支架的支撑下,布置于高于飞行器中心板顶板10cm处,以获得良好的卫星定位信号。定位模块可同时接收GPS卫星信号和GLONASS卫星信号,最多可接收到20颗以上卫星的定位信号,并利用串口将数据传回飞控计算机。飞控系统可支持2个全球卫星定位模块同时输入数据,在一个模块失效的情况下,另一模块可以随时代替工作,提高飞行的安全性。
惯性导航单元采用MPU6000芯片,能测算出飞行器各个方向上的线加速度和角加速度信息,從而计算出飞行器的飞行姿态与相对位置[13]。电子罗盘模块LSM303D与飞控计算机利用I2C接口相连,提供飞行器当前的航向角信息[14]。气压高度传感器MS5611-01BA利用在大气对流层内气压随高度增大而减小的原理,计算得出当前的飞行器高度[15]。另外,飞控系统具备实时存储功能,能将飞行器各项数据实时记录,用于后期分析。
此外,飞控系统板提供了13路PWM输出接口、4路TTL串口、1路I2C接口、1路SPI接口和1路CAN总线接口。除GPS模块需要单独拉高以获得良好的信号环境以外,飞控计算机与导航系统所需的各种传感器集成于同一块电路板上,前后采用2组带固定螺钉的伺服连接器与其他必要的元器件连接,可靠性更好,集成度高,并且能实现系统板的整体替换,便于田间维修。
2.1.3 电气系统
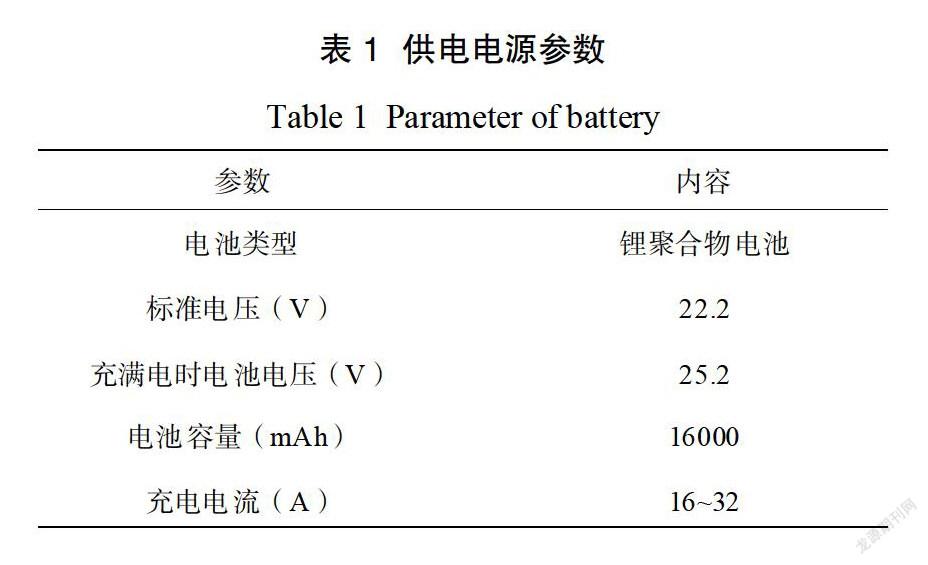
电气系统主要包括用电器、电源和配电系统。在电源选择方面,锂聚合物电池由于目前质能比高,安全性好,被广泛应用于多旋翼无人机中。而由于飞机需要搭载的载荷重量较大,所以选择标称电压为22.2V的电池进行供电。飞行器采用的供电电源参数如表1所示。
由于飞控系统的工作电压为5V,且各个电子调速器需要电池以20V以上的电压直接供电,所以配电系统将电池供电分为两路,一路将电压降低至5V供飞控系统和其他外部设备使用,另一路直接供应给8个电机使用,以保证飞行器的正常工作。
2.1.4 农情采集任务设备
选用索尼公司生产的Nex-7相机(Sony corporation, Japan)采集农田图像信息,可采集可见光波段下的图像数据,分辨率为6000×4000px。在使用25mm焦距镜头的条件下,从距离地面25m的高度采集图像数据,其正射影的地面分辨率可达到0.39cm。
相机安装在三轴无刷电机自稳云台上。惯性导航单元布置云台上,可以实时采集相机的姿态数据。云台控制系统对接收到的姿态数据进行计算后发出信号控制各轴电机,从而使相机光轴在飞行器姿态调整的过程中尽可能保持垂直于地面[16]。
相机触发信号由相机内部电路板引出,与飞控系统的控制开关相连。当飞行器输出的PWM信号占空比高于一定值时,开关两端短接,相机快门被触发并采集单帧图像数据,从而实现由飞控计算机直接控制任务设备,使得飞机与任务设备协调工作。同时触发的还有为Nex-7相机配套设计的相机位置与姿态采集装置(Position and Orientation System,POS)和照度传感器[17],前者主要集成了全球卫星定位模块、惯性导航单元、电子罗盘和气压传感器,后者则主要实现实时获取环境光照强度信息。当飞行器到达拍摄点,飞控系统发出信号触发相机时,上述两个装置同时被触发,记录下飞行器当前的经纬度坐标、飞行高度、拍摄照片时的环境光照强度以及相机拍摄时云台的俯仰角(Pitch)、横滚角(Roll)和航向角(Yaw)等信息,并与飞行器本身实时记录的触发相机时的飞行数据能够进行逐一对应分析,以供后期遥感图像的处理。
与市面上常用的大疆公司的Phantom系列等消费级航拍无人机相比,该无人机系统的任务设备能够在提供图像信息的同时提供图像的地理位置信息和照度信息,便于后期生成精准的作业处方图,指导农民根据地理位置来执行精细农业作业。任务设备采用独立电源进行供电,防止云台故障影响飞行器正常飞行,其系统架构如图4所示。
2.2 控制站与通讯链路设计
在农情监测系统中,控制站与通讯链路结合,形成了一套对于飞行器的远程监测与控制体系。通讯链路采用了一对X-tend无线传输模块。控制站中则包括了一套独立的手动遥控器,遥控器可以通过向飞控计算机发送控制信号手动操控飞行器的前进、后退、自转、侧移等基本动作。另外,控制站还包括了一台与通讯链路设备相连的便携式计算机。在计算机上预先规划好任务航线上传后,飞行器也可以在自动飞行模式下,执行全自动飞行巡航任务。飞行器通过通讯链路按照MAVlink协议[18]实时发回的数据经过解析后显示在屏幕上,如图5所示。
在自动工作模式中(如图6所示),控制站根据飞行高度、相机焦距、传感器大小等参数计算出单张图像能覆盖的区域尺寸,之后再根据事先设定的相邻两张图像的航向重叠率与旁向重叠率,自动计算出拟触发相机采集图像的飞行器经纬度坐标,生成飞行路径并通过通讯链路上传至飞控系统。在实际作业中,航向重叠率需要在60%以上,旁向重叠率要在30%以上[19]。飞控系统控制飞机按图上的顺序到达指定位置后依次发出控制信号控制任务设备进行工作,从而实现任务设备与飞机之间的协调工作。
3 性能测试方案
飞行器的飞行性能和任务完成质量是评价无人机农情监测系统性能的重要指标。因此,课题组选取浙江省诸暨市一块长方形油菜田(起飞点坐标:东经120°6'9.14"、北纬29°31'4.54")进行了6次无人机系统飞行测试,其飞行高度为25m,飞行速度2.5m/s,飞机为自动航行模式,并设计航拍点,设置航向重叠率75%,旁向重叠率为60%。单次飞行计划拍摄229张航片。
在飞行结束后,收集飞控系统实时记录的飞行数据和POS装置生成的照片拍摄云台位置与姿态数据,就可以分析得到农情监测系统工作的飞机姿态与云台姿态的稳定性、实际拍摄位置精确度以及是否漏拍重拍等信息。单次巡航飞行计划如图7所示,图中在农田内部的黄色坐标点为设定拍摄的飞行器位置。
4 结果与讨论
4.1 云台稳定效果测试
在飞行过程中,飞行器的飞行姿态会时刻变化。由于多旋翼无人机在飞行过程中需要对抗外部风场以及空气阻力的干扰,其飞行姿态相对于水平面通常都是呈一定角度倾斜,且会随着外部环境的变化而实时调整。由于相机拍摄对于姿态稳定性有一定要求,所以在该无人机系统中设计了自稳云台来维持相机拍摄角度的稳定。
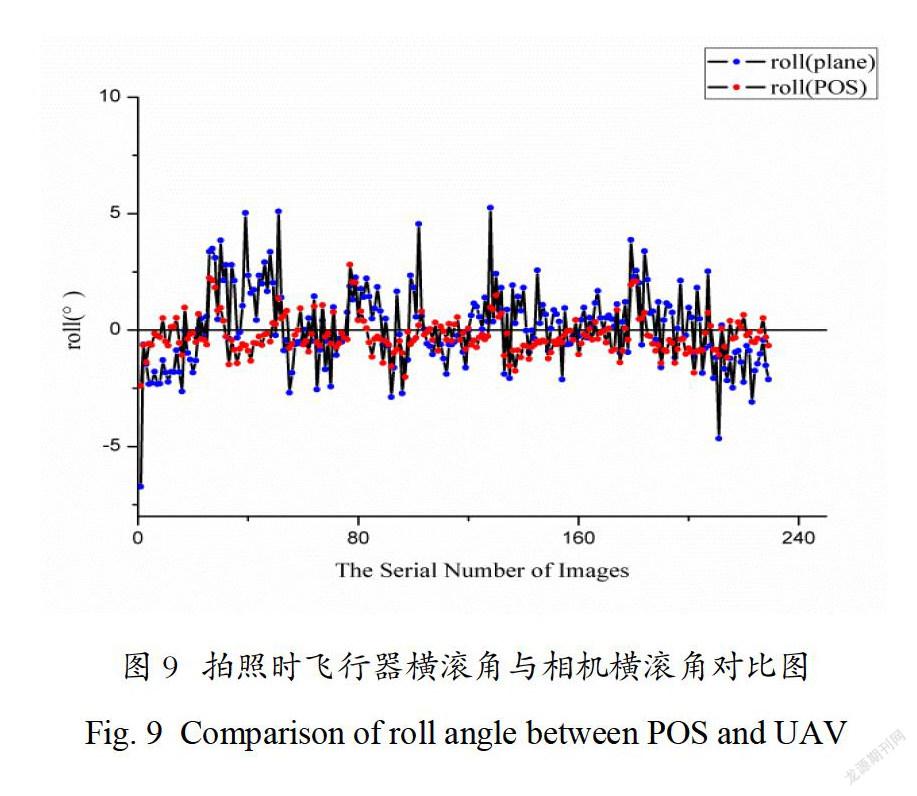
描述飞行器与水平面以及相机与水平面之间的倾斜姿态主要有两个指标:俯仰角(Pitch)和橫滚角(Roll)。正值俯仰角表示飞行器或相机以水平面为起点绕横轴沿顺时针方向旋转,反之则为负。正值横滚角表示飞行器或相机以水平面为起点绕飞行器纵轴顺时针方向旋转,反之则为负。以第1次巡航试验飞行数据结果为例,通过读取飞行器的俯仰角的分布与相机搭载的POS装置记录的相机俯仰角的分布,绘制如图8所示的俯仰角波动对比图。
在第1次巡航试验中,飞行器的横滚角与POS装置记录的相机横滚角的对比分布如图9所示。
经过对图8和图9数据分析得出,飞行器在飞行航点采集图像的过程中,飞行器俯仰角以及横滚角的波动范围远大于云台的俯仰角与横滚角波动范围,将6次实验的数据进行分析可以得到如表2结果。
综上所述,由上表可知,在飞机拍摄图片期间云台俯仰角与横滚角的变化剧烈程度明显小于飞机的俯仰角与横滚角的变化剧烈程度。这表明与直接将相机与飞机绑定的系统集成方式相比,将相机安装在自稳云台上使得相机在多旋翼飞机抵抗外部干扰和调整飞机姿态的过程中能以更稳定的姿态采集地面农情信息,便于后期对遥感图像进行处理与分析。
4.2 飞行器实际拍摄位置与计划位置偏差
无人机采用的全球卫星定位模块在静止的情况下,输出的经纬度坐标位置会在半径数米内的圆内随机波动[20]。因此,为了保证飞行器能够正常进入拍摄点进行拍摄,飞控系统在执行飞行计划时并不需要飞行器准确到达拍摄点才触发相机,而是当飞行器进入了以预先设定的拍照点为圆心、一定半径的圆形区域范围内即会触发相机快门。所以,相机实际触发位置与计划触发位置之间的偏差可以用于评估无人机农情监测系统的任务完成质量。在6次巡航飞行中,将计划中飞控系统发出触发信号的经纬度坐标点与飞行器记录的实际触发的坐标点投影到同一地图坐标系上。以坐标点东经120°6'3.72",北纬29°31'3.58"为原点,南北方向为纵轴(北向为正)、东西方向为横轴(东向为正)建立直角坐标系。当坐标变化范围在不超过±1'的情况下可以根据如下的公式计算其在直角坐标系的坐标值[21]。
x-x0=Kx (Lon -Lon0)(1)
y-y0=Ky (Lat -Lat0)(2)
其中,x0与y0为直角坐标系原点横坐标和纵坐标,设定为0,m;Lon为待计算点的经度值,rad; Lon0为原点的经度值(东经为正,西经为负),rad;Lat0为待计算点的纬度值,rad; 为原点的纬度值(北纬为正,南纬为负),rad。另外,kx与ky的计算公式如公式(3)和(4)所示[21]:
Kx = (3)
(4)
其中,a为地球赤道半径,6378153m;b为地球极半径,6356750m。e的计算公式如(5)所示[21]:
e = (5)
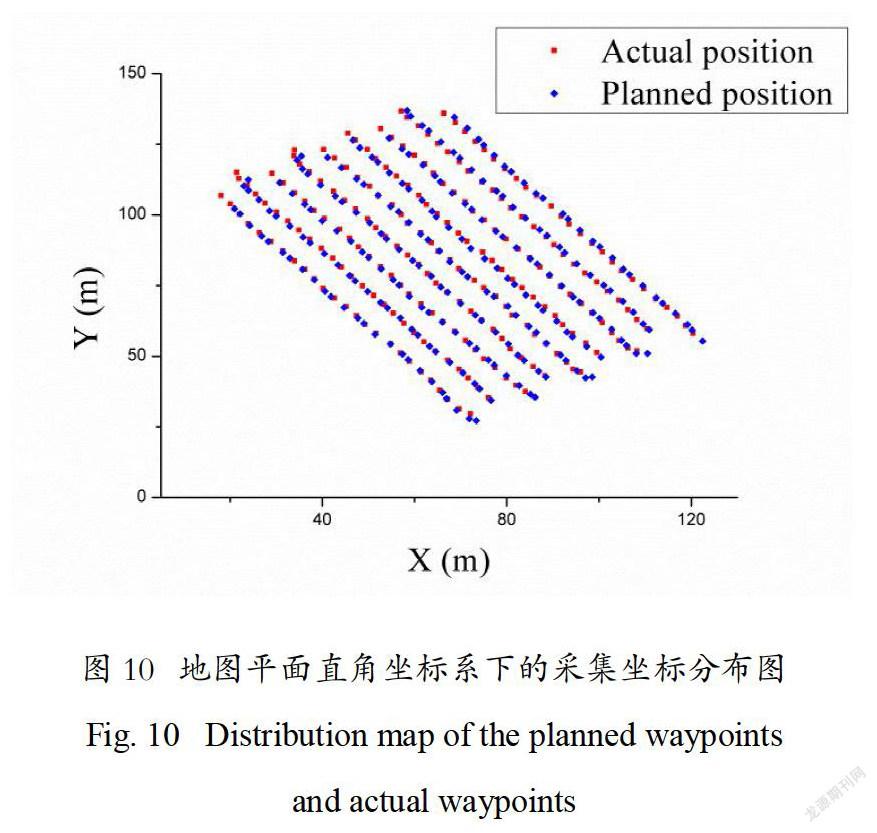
计算得到的在直角坐标系下的分布如图10所示:
在图10中,蓝色点代表飞控系统发出指令控制相机的采集图像的坐标点,红色点代表实际采集图像的坐标点。从中我们可以看出,飞控系统控制拍照的位置与实际相机拍摄的位置基本吻合。以第1次飞机巡航试验为例,计算上述两个位置相差的距离可以得到如图11所示的曲线。
经计算得到在6次试验中,任务设备实际拍摄位置与飞控系统向任务设备发送指令的位置距离偏差如表3所示。
经由上表可以看出,飞机在6次自动巡航测试中,飞机实际拍照位置与飞控系统发出信号的位置偏差平均值在3m左右,基本满足农业作业的实际需求。
4.3 图像拼接
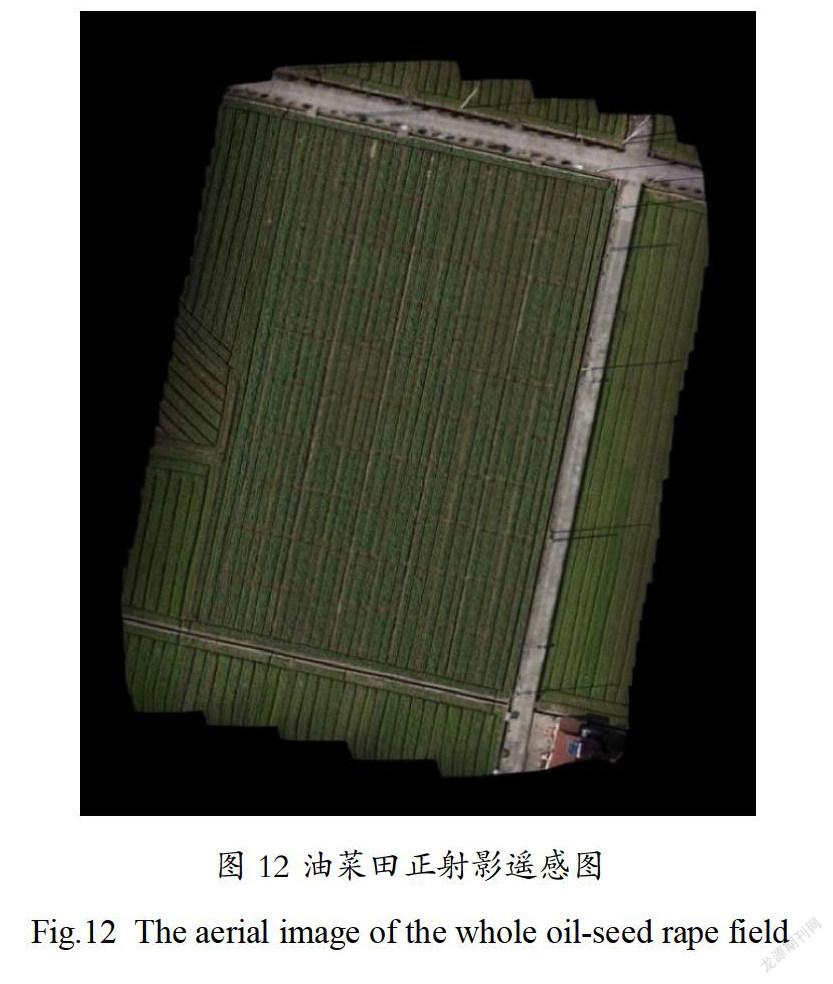
在6次飞行中,单次飞行计划拍摄照片229张,实际飞行拍摄229张,系统无重拍、漏拍现象。将每次飞行采集存储的图片导入由Agisoft公司开发的Agisoft Photoscan三维重构软件
(Agisoft LLC, Russia)中进行图像拼接和校准可以得到完整的农田正射影图像,实现了对于农田的信息采集的功能。以第1次飞行试验为例,试验农田25m高度低空正射影图像,如图12所示。
5 结论
通过长期产品试制与试验,最终搭建了一套用于农情监测的多旋翼无人机系统。经过测试和使用对比,得出如下的结论:
(1)通过分析6次平行试验中飞行器与相机在采集图像时的姿态信息可以发现,在飞行器自动巡航飞行抵抗风力和调整倾角的过程中,相机的俯仰角与横滚角的标准偏差明显小于飞行器的标准偏差。这说明了与直接将相机与飞机绑定的系统集成方式相比,将相机安装在自稳云台上能够使相机以更稳定的姿态采集地面农情信息,便于后期对遥感图像进行处理与分析,满足了实际农情监测需求。
(2)飞行器在6次飞行试验过程中,实际拍摄张数与设定的拍摄张数一致,实际拍摄位置与计划拍摄位置距离偏差基本符合农田作业的需求。导入到Agisoft Photoscan软件中,经过后期图像拼接与校正,系统获得了在可见光波段下农田整体正射影图像,说明该系统已经实现了根据设定飞行路径自主飞行采集农田图像的功能,满足了实际的作业需要。
(3)经与市面上类似规格的商用无人机改装的农用无人机系统进行对比,本款飞机的飞控系统集成度高,可靠性好。以飞控系统为核心,该系统实现了飞机飞行和任务设备的协同控制。飞控系统与任务设备在工作过程中同时采集所有传感器数据,为分析农情提供更加完善的数据保障。此外,该系统有更多的开放接口,为进一步安装更多农用任务设备与飞机导航设备提供了空间。在实际应用中,操作者可以使用一架飞机迅速更换不同的任务设备开展作业,作业效率更高。
参考文献
[1] 汪懋华. “精细农业”发展与工程技术创新[J]. 农业工程学报, 1999(01): 7-14.Wang M. Development of precision agriculture and innovation of engineering technologies[J]. Transactions of the Chinese Society of Agricultural Engineering, 1999(01): 7-14.
[2] 罗锡文, 张泰岭, 洪添胜. “精细农业”技术体系及其应用[J].农业机械学报, 2001(02): 103-106.Luo X, Zhang T, Hong T. Technical system and application of precision agriculture[J]. Transactions of the Chinese Society of Agricultural Engineering, 2001(02): 103-106.
[3] 江晶. 国家现代农业示范区运行机制与发展模式研究[D]. 北京: 中国农业科学院, 2013.Jiang J. Research on the operational mechanism and developmental modes of the national modern agriculture demonstration zone[D]. Beijing: Chinese Academy of Agricultural Sciences, 2013.
[4] 周志艳, 臧英, 罗锡文, 等. 中国农业航空植保产业技术创新发展战略[J].农业工程学报, 2013, 29(24): 1-10.Zhou Z, Zang Y, Luo X, et al. Technology innovation development strategy on agricultural aviation industry for plant protection in China[J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(24): 1-10.
[5] 周志艳, 明锐, 臧禹, 等. 中国农业航空发展现状及对策建议[J]. 农业工程学报, 2017, 33(20): 1-13.Zhou Z, Ming R, Zang Y, et al. Development status and countermeasures of agricultural aviation in China[J]. Transactions of the Chinese Society of Agricultural Engineering, 2017,33(20): 1-13.
[6] Khan Z, Chopin J, Cai J, et al. Quantitative estimation of wheat phenotyping traits using ground and aerial imagery[J]. Remote Sensing, 2018, 10(6): 1081.
[7] Flynn K F, Chapra S C. Remote sensing of submerged aquatic vegetation in a shallow non-turbid river using an unmanned aerial vehicle[J]. Remote Sensing, 2014, 6(12): 12815-12836.
[8] Holman F H, Riche A B, Michalski A, et al. High throughput field phenotyping of wheat plant height and growth rate in field plot trials using UAV based remote sensing[J]. Remote Sensing, 2016, 8(12): 1031.
[9] 孫毅, 王英勋. 无人机驾驶员航空知识手册[M]. 北京: 中国民航出版社, 2014: 6-49.Sun Y, Wang Y. UAV pilot’s handbook of aviation knowledge[M]. Beijing: China Civil Aviation Publishing House, 2014: 6-49.
[10] 李伟荣. 带悬挂吊舱的八旋翼特种无人机动力学建模与控制[D]. 杭州: 浙江大学, 2015.Li W. Modeling and control of a special unmannedoctocopter with a slung load[D]. Hangzhou: ZhejiangUniversity, 2015.
[11] 范继伟. 基于混杂控制系统的八旋翼飞行器设计[D]. 吉林:东北电力大学, 2018.Fan J. Design of eight rotor aircraft based on hybridcontrol system[D]. Jiling: Northeast Electric PowerUniversity, 2018.
[12] 張金亮. 捷联惯性/星光组合导航关键技术研究[D]. 西安: 西北工业大学, 2016.Zhang J. Key techniques for inertial stellar integrated navigation system[D]. Xi’an: Northwestern PolytechnicalUniversity, 2016.
[13] 王守宽. 基于MEMS低成本微型捷联惯性导航系统研究[D]. 北京:北京理工大学, 2016.Wang S. Research on low cost and micro strapdowninertial navigation system based on MEMS[D]. Beijing: Beijing Institute of Technology, 2016.
[14] 李希胜, 王家鑫, 汤程, 等. 高精度磁电子罗盘的研制[J]. 传感技术学报, 2006(06): 2441-2444.Li X, Wang J, Tang C, et al. Development of highaccuracy magnetic electronic compass[J]. ChineseJournal of Sensors and Sctuators, 2006(06): 2441-2444.
[15] 王伟, 周勇, 王峰, 等.基于气压高度计的多旋翼飞行器高度控制[J]. 控制工程, 2011, 18(04): 614-617.Wang W, Zhou Y, Wang F, et al. Altitude control of multi-rotor type aircraft based on pressure sensor[J]. Control Engineering of China, 2011, 18(04): 614-617.
[16] Rajesh R J, Kavitha P. Camera gimbal stabilization using conventional PID controller and evolutionary algorithms[C]//Computer, Communication and Control (IC4), 2015 International Conference on. IEEE, 2015: 1-6.
[17] 王贤. 基于POS系统的数字正射影像制作研究[D]. 绵阳: 西南科技大学, 2018.Wang X. Research on making digital orthophoto map based on position and orientation system[D]. Mianyang: Southwest University of Science and Technology, 2018.
[18] Fuller B, Kok J, Kelson N A, et al. Hardware design and implementation of a MAVLink interface for an FPGA-based autonomous UAV flight control system[C]//Proceedings of the 2014 Australasian Conference on Robotics and Automation. Australian Robotics &Automation Association ARAA, 2014: 1-6.
[19] 盛浩然. 航空摄影测量基础知识[M]. 北京: 测绘出版社, 1979.Sheng H. Aerial photogrammetry basics[M]. Beijing: Sinomaps Press, 1979.
[20] 潘冉冉. 基于RTK的农机精准定位系统的研究[D]. 杭州:浙江大学, 2017.Pan R. Research on agricultural machinery precisionpositioning system based on RTK[D]. Hangzhou: Zhejiang University, 2017.
[21] Srivastava A K, Goering C E, Rohrbach R P. Engineering principles of agricultural machines[M]. St. Joseph: American Society of Agricultural Engineers, 2006: 128-138.
Development and performance evaluation of a multi-rotor unmanned aircraft system for agricultural monitoring
Jiangpeng Zhu1,2, Haiyan Cen1,2, Liwen He1,2, Yong He1,2*
(1. College of Biosystems Engineering and Food Science, Zhejiang University, Hangzhou 310058, China;
2.Key Laboratory of Spectraoscopy Sensing, Ministry of Agriculture and Rural Affairs, Hangzhou 310058, China)
Abstract: In modern agriculture production, to obtain real-time, accurate and comprehensive information of the farmlands is necessary for farmers. Unmanned Aircraft System (UAS) is one of the most popular platforms for agricultural information monitoring, especially the multi-rotor aircraft due to its simplicity of operation. It is easy to control the speed and altitude of multi-rotor aircraft, even at low altitude. The above features enable multi-rotor UAS to acquire high-resolution images at low altitudes by integrating different imaging sensors. The aim of this work was to develop an octocopter UAS for agricultural information monitoring. In order to obtain the high-resolution aerial images of the entire experimental field, the Sony Nex-7 camera was attached to the aircraft. According to the real-time position of the aircraft got from global position system (GPS) and inertial measurement unit (IMU), the flight control system of the aircraft will send signals to control the camera to capture images at desired locations. Besides, position and orientation system (POS) and an illuminance sensor were loaded on the aircraft to get the location, shooting angle and ambient illumination information of each image. The system can be used to collect the remote sensing data of a field, and the performance was comprehensively evaluated in the field of oilseed rape experimental station in Zhuji, Zhejiang Province, China. The result shows that the system can keep the camera optical axis perpendicular to the ground during the operation. Because the effective communication was established between the mission equipment and the flight control system, the UAS can accurately acquire the images at the pre-defined locations, which improved the operation efficiency of the system. The images collected by the system can be mosaicked into an image of the whole field. In summary, the system can satisfy the demand for the agricultural information collection.
Key words: unmanned aircraft system; agricultural monitoring; remote sensing images; automatic flight; path planning; agricultural information acquisition
猜你喜欢
物联网技术(2016年12期)2017-01-21
中国新通信(2016年22期)2017-01-13
电脑知识与技术(2016年28期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年26期)2016-11-25
科技视界(2016年20期)2016-09-29
电脑知识与技术(2016年17期)2016-07-23
电脑知识与技术(2016年13期)2016-06-29
商场现代化(2016年3期)2016-04-08
