基于TM4C123单片机的模拟电磁曲射炮设计与试验
2019-09-10 07:22:44陈颜皓
赤峰学院学报·自然科学版 2019年12期
陈颜皓

摘 要:基于2019年全国大学生电子设计竞赛中H题“模拟电磁曲射炮”的任务要求,设计了模拟电磁炮自动控制系统.系统以TI公司的TM4系列单片机作为电磁炮的控制核心,采用LDX-218数字舵机驱动云台.可实现通过串口屏输入射击距离和偏转角;通过激光测距结合OpenMV摄像头的图像处理捕获引导标识从而对电磁炮进行智能控制.3个基本要求测试任务全部完成,3个发挥部分测试任务部分完成,作品获得该次竞赛江苏省二等奖.
关键词:电磁炮舵机云台;TM4;OpenMV摄像头
中图分类号:TP27;O441 文献标识码:A 文章编号:1673-260X(2019)12-0045-04
0 引言
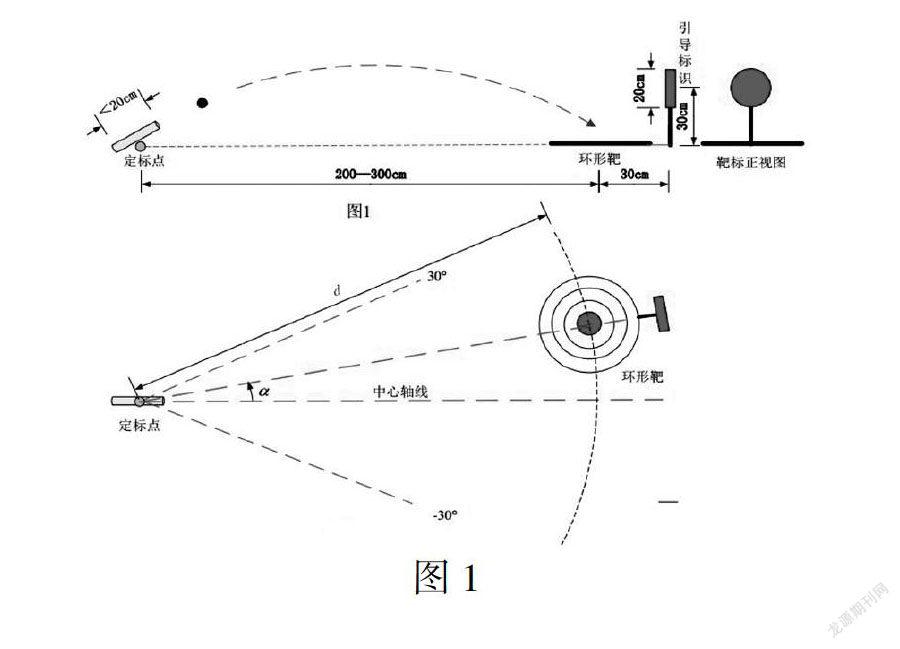
全国大学生电子设计竞赛(National Undergraduate Electronics Design Contest)(以下简称电赛),是教育部和工业和信息化部共同发起的大学生学科竞赛之一,是面向大学生的群众性科技活动,目的在于推动高等学校促进信息与电子类学科课程体系和课程内容的改革[1].竞赛的特点是与高等学校相关专业的课程体系和课程内容改革密切结合,以推动其课程教学、教学改革和实验室建设工作.2019年全国大学生电子设计竞赛中,H题的任务是自行设计并制作一个模拟电磁曲射炮(以下简称电磁炮),炮管应采用线圈炮,水平方位及垂直仰角方向可调节,用电磁力将弹丸射出,击中目标环形靶和引导标识(以下简称标靶),发射周期不得超过30秒.电磁炮由直流稳压电源供电,电磁炮系统内允许使用容性储能元件.基础要求是电磁炮能做到通过输入设备设定目标的距离和或距离和水平偏转角,并发射炮弹.发挥部分是:(1)一键启动,电磁炮能在30s内找到偏离中心-30°至30°的红色标靶,测定距离并发射炮弹;(2)一键启动,电磁炮能在10s内找到偏离中心-30°至30°,距离250cm的红色标靶,并在运动过程中发射炮弹.以完成任务的情况和击中环形靶的环数得分.
1 系统结构与工作原理
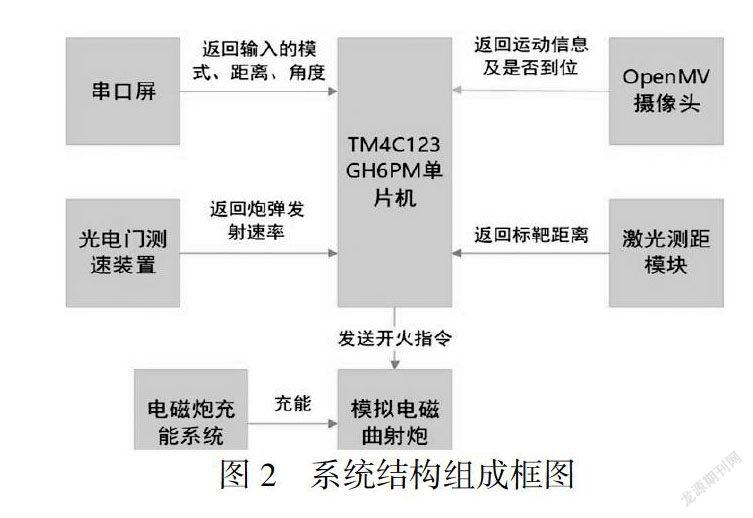
系统总体上分为两部分:通过电磁继电器控制的电磁炮充能和发射电路系统和单片机的云台控制系统,在提高部分结合摄像头图像处理和激光测距模块.
电磁炮充能系统控制由直流升压模块和大容量电容组成,用继电器和可控硅实现单片机对电路的控制.
云台控制系统由单片机控制两个舵机,图像处理对摄像头返回的图像做二值化操作并且捕获红色标靶的中心坐标,待云台旋转至正对靶心时,激光模块测定标靶的距离并转换为靶心的距离.通过大量计算和测量拟合出充电时间、发射角和落点的关系,并依据拟合的函数确定充电时间和发射角.
2 系统硬件选择与电路设计
2.1 微处理器单元
采用TI公司的TM4系列单片机,32位ARMRCortexTM-M4 80 MHz处理器内核,带有系统定时器,集成嵌套向量中断控制器,带时钟门控的唤醒中断控制器,存储器保护单元,IEEE754兼容的单精度浮点单元,嵌入式跟踪宏和跟踪端口,系统控制块和Thumb-2指令集.
2.2 测距距离单元
采用tof激光传感器[2].tof激光模块可以实现3-60米误差0.1cm的测量范围和精度效果远超一般激光模块以及超声波模块.并且处理方式也比较简单,读取信息时直接返回距离而非AD值,缺点是成本较高.
2.3 图像处理单元
采用OpenMV摄像头.OpenMV通过mircopython编程,封装极其完善,具有完整的图像处理库和单片机驱动库.OpenMV的二值化处理的阈值是从LAB颜色空间确定的[3],对环境光干扰的抗性较差,但是其配件能够减小这种影响.并且在加装长焦镜头后,靶标在OpenMV画面中所占的画幅明显大于常见的树莓派摄像头.
2.4 显示及输入单元
采用3.5寸HMI串口屏.HMI串口屏具有完善的图形化上位机,并且搭载stm32微处理器,可以进行一定程度的开发,比如逻辑处理、定时器等.3.5寸触摸电容屏,既可以显示系统当前参数,又可以完美代替矩阵键盘的输入功能.
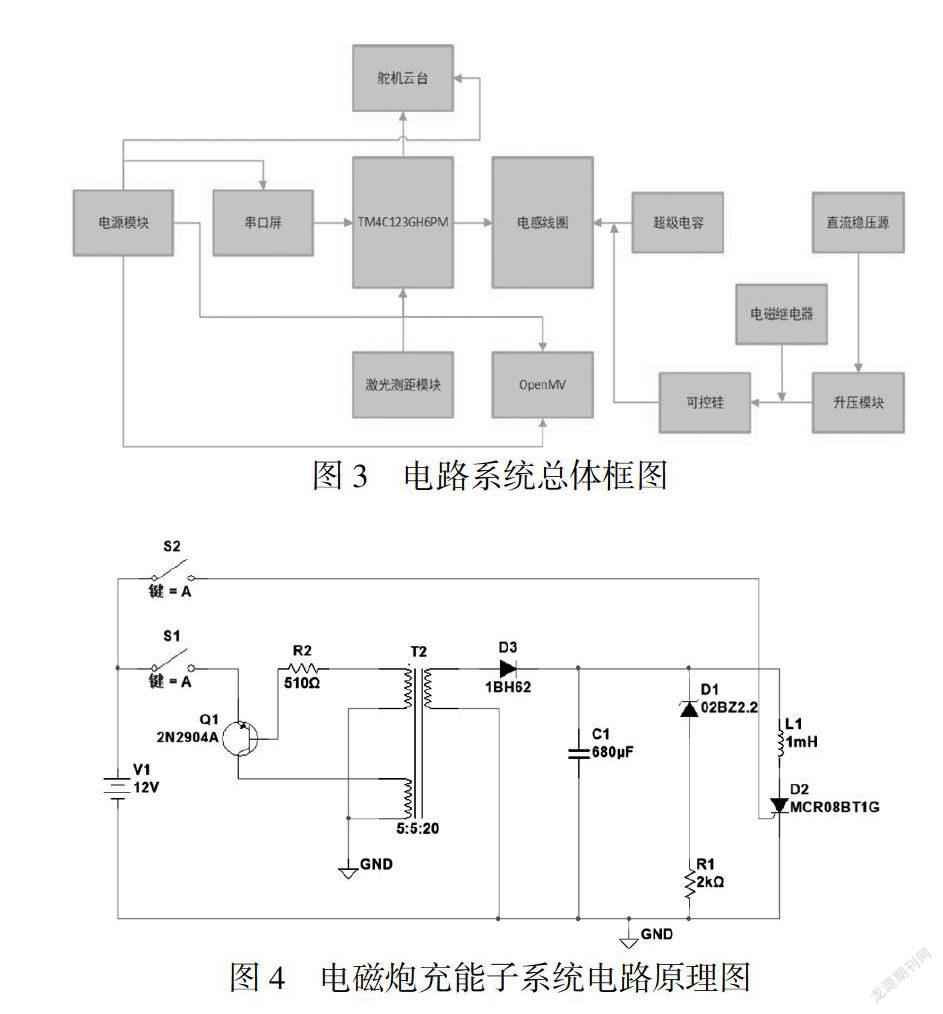
2.5 整体电路的设计
电路以TM4单片机为核心,从串口屏、激光测距模块、OpenMV获取信息,控制舵机云台瞄准和发射电磁炮.
3 软件系统的设计
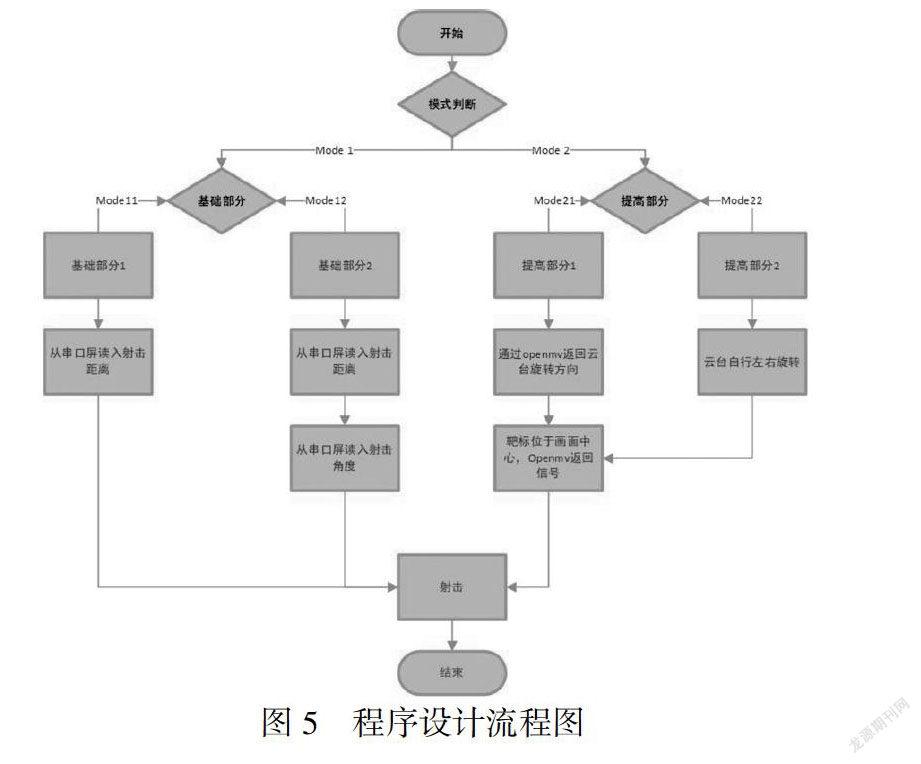
根据题目要求软件部分主要实现串口屏的和OpenMV设置和显示.
串口屏实现功能:选择当前得题目;在基础要求中,距离值d和旋转角α;在发挥部分第三题,通过按钮选择指定数字.
OpenMV实现功能:在发挥部分第一题识别红色标靶得靶心,返回云台运动方向,并在靶心处于画面中央时返回开火信息;在发挥部分第二题,计算提前量并返回开火信息.
4 系统理论分析与计算
Satapathy和McNab等根据8MJ电磁发射弹丸的实际外形尺寸建立了相应的计算流体力学 (Computational Fluid Dynamics, CFD)模型[4],并利用此模型解算获取不同马赫数条件下的气动参数.
4.1 电磁炮电力电子系统的理论分析与计算
超级电容与电池储能的明显区别在于充、放电过程中发生的显著端电压变化[5].RC充电电路的时间常数τ=RC,充电时:
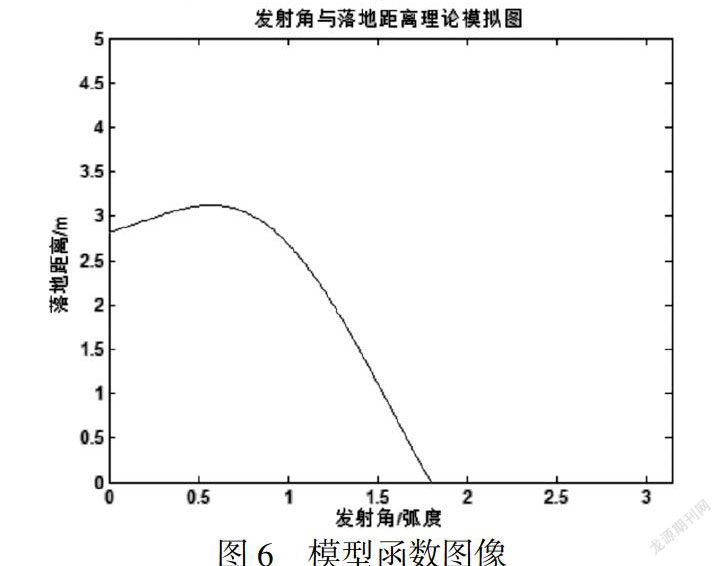
4.2 炮弹发射与弹道理论分析与计算
任何自由剛体的运动,都可以看作是刚体的质心运动和围绕质心两种运动的合成[6].已知电容C=680?滋F,炮弹直径r=10mm,炮弹为铁质,炮口离地高度为h=15cm.
4.3 基于实际测试结果的曲线拟合
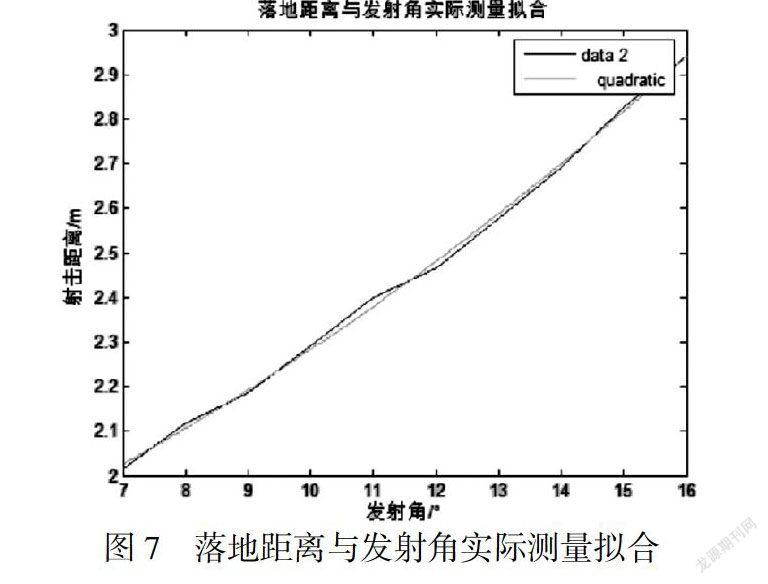
曲线拟合又称作函数逼近,是求近似函数的一类数值方法[7].通过基于实际测试结果拟合的曲线,我们可以得到更切合实际的弹道参数,从而增加电磁炮发射的精准度.实际测试充满电的情况下,发射角和落地距离的测试结果(数据).
由理论计算,可以得知在发射角处于5°-17°时,整体曲线趋向于二次函数[8].故使用MATLAB拟合的图像如图7.
函数表达式为:y=0.0043*x2-0.0064*x+1.9
4 实验与分析
4.1 测试条件与仪器
测试时间:8月9日21:00;
测试地点:实验室;
测试地点环境温湿度:温度30℃,湿度51%;
测试地点环境风向:无.
4.2 测试方案
测试每道题的落点环数.
基础部分第一题测试5次,指定距离分别为250cm,240cm,280cm,270cm,250cm,结果分别为8环,9环,9环,10环,9环;
基础部分第二题测试5次,指定距离、角度分别为220cm、15°,250cm、13°,280cm、25°,270cm、-20°,260cm、-15°,结果分别为7环,9环,9环,8环,9环;
发挥部分第一题,随意摆放五个不同位置,结果分别为8环,6环,7环,8环,8环;
发挥部分第二题,随意摆放五个不同位置,结果分别为6环,7环,7环,8环,8环;
4.3 实际比赛情况
实际比赛中,电磁炮系统完成了基本要求部分的全部任务,分别为9环和4环;部分完成了发挥部分要求,获得7环和4环.最终获得江苏赛区二等奖,验证了电磁炮自动控制系统设计的合理性.但是,由于在设计时没有考虑到环形靶的厚度,在面对实际测试场地的带有一定厚度的环形靶时,出现了精度大幅下降的情况,严重影响了实际测评的结果,需要进一步优化.
5 结论与讨论
该设计采用TM4C123作为主控芯片的微处理器,设计并制作了模拟电磁曲射炮自动控制系统,完成了个单元的硬件电路选型以及软件的设计.较好地实现了图像处理、距离测量、自动击发等要求,达到预期设计目的.
参考文献:
〔1〕廖杰,李旭,陈熵,刘成鑫,谭宁宁,巫帮锡.双旋翼飞行器升降控制系统设计与试验[J/OL].机电工程技术,2019(08):103-107[2019-09-15].http://kns.cnki.net/kcms/detail/44.1522.TH.20190823. 1532.076.html.
〔2〕迎九.第二代FlightSense的ToF激光测距的工程设计考量[J].电子产品世界,2016,23(09):21-24.
〔3〕邹浩,郭雨婷,李佳盈,高雁凤,许素安,陈锡爱.基于OPENMV的色彩引导机器人系统研究[J].科技资讯,2018,16(25):85-86.
〔4〕Satapathy S S, McNab I R, Erengil M E, et al.Design of an 8-MJ integrated launch package[C]. Proceedings of 12th Symposium on Electromagnetic Launch Technology, 2005:405-410.
〔5〕张慧妍,程楠,景阳.超级电容器储能系统的应用研究综述[J].电力电子技术,2011,45(12):51-53.
〔6〕李湘平,鲁军勇,冯军红,李开,杜佩佩.电磁发射弹丸飞行弹道仿真[J].国防科技大学学报,2019(04):25-32.
〔7〕趙久奋,唐勤洪,史绍琨.基于曲线拟合的通用仿真弹道设计方法研究[J].战术导弹技术,2019(03):53-58.
〔8〕唐勇,费付聪,周延怀.自制演示型电磁炮及其相关研究[J].物理教师,2015,36(01):47-48.