智能电动多功能服务小车的设计与实现
2019-09-10 15:49:08张苏新谈佳豪孙加存
现代信息科技 2019年14期
张苏新 谈佳豪 孙加存

摘 要:当今社会老龄化日趋严重,大量留守老人独自在家,无法独自搬运物体,给生活带来不便,本文以此为背景,设计一款智能电动多功能服务小车。本文首先对推车的历史、发展趋势和特点进行了阐述,在此基础上对系统进行了硬件设计,主控器选用含有ATMEGA2560-16AU控制器的MegaPi Pro控制板,运动控制部分选用37mm、12V/200RPM的直流电机和配套的驱动器,图像采集模块选用500W像素的OV5640型号的摄像头,定位模块选用WF-NEO-6M模块和配套的SMA GPS天线。软件上,通过mBlock图形化编程软件对小车运动控制进行编程,同时通过Keil软件对摄像头采集图像和GPS定位模块进行了程序的编写。在硬件和软件完成的基础上,对实物进行了运行调试,最终实现了小车的运动、图像采集和GPS定位等功能。
关键词:智能电动小车;图像采集;GPS定位
中图分类号:TP23;TP368.2 文献标识码:A 文章编号:2096-4706(2019)14-0137-03
Design and Implementation of Intelligent Electric Multi-function Service Car
ZHANG Suxin,TAN Jiahao,SUN Jiacun
(Suzhou Vocational University,Suzhou 215104,China)
Abstract:Nowadays,with the aging of society becoming more and more serious,a large number of Left-behind elderly people are at home alone,unable to carry objects alone,which brings inconvenience to life. Based on this background,this paper designs an intelligent electric multi-functional service car. Firstly,the history,development trend and characteristics of the cart are described. On this basis,the hardware design of the system is carried out. MegaPi Pro control board with ATMEGA2560-16AU controller is selected as the main controller,37mm,12V/200RPM DC motor and matching driver are selected as the motion control part,500W pixel OV5640 camera is selected as the image acquisition module,and positioning module is selected as the positioning module. WF-NEO-6M module and matching SMA GPS antenna are used. In software,the car motion control is programmed by mBlock graphical programming software,and the camera image acquisition and GPS positioning module are programmed by Keil software. On the basis of the completion of hardware and software,the object is debugged and the functions of motion,image acquisition and GPS positioning of the car are finally realized.
Keywords:intelligent electric car;image acquisition;GPS positioning
0 引 言
推车的主要作用是以人力推、拉车辆,实现短距离货物运输的工具,在我国有近两千年的发展历史,虽然物料搬运技术不断发展,但推车仍作为不可缺少的搬运工具而沿用至今,在生产和生活中获得广泛应用。其造价低廉、维护简单、操作方便、自重轻,能在机动车辆不便使用的地方工作,在短距离搬运较轻的物品时十分方便。早在两汉时期,我国的推车已形成了一种比较固定的样式,以独轮为主,在全国各地普遍流行,服务于生活、军事各个方面,后面又因地制宜地制造出各种样式,但总的来说还是以独轮为主。如果单就出土图像“鹿车”看,我们比较容易猜想时间应上推到西汉晚年。但是,這种被普遍使用的成熟的“鹿车”应有一个长期的成型过程。
在近几年随着科技的发展,国内的推车也几经演变,制作材料也由木制为主,向塑料、铝合金、铁制等发展,用途也更加广泛,目前推车就有用到厂区、办公楼、图书馆、宾馆、餐饮业、物流运输等物料搬运行业,也根据不同的需要开发了不同功能的推车,如用在室内办公场所的超静音手推车、用在图书馆的网架式手推车,多功能工具用推车、可折叠行李小推车、楼梯攀爬专用推车等。
当今社会,老龄化日趋严重,大量留守老人独自在家,若有东西需要搬运时,大部分老年人无法独自完成,如果距离较远,更是困难。本文针对老年人出行、搬运货物不方便等问题开发了智能电动多功能小车,该小车以日常的小推车为基础构架,重新设计、构造和开发,集合了助力、定位、控制和视觉等功能,构建了一个较为完整的老年人行动、生活辅助工具。
1 推车概述
推车在生产和生活中获得广泛应用是因为它造价低廉、维护简单、操作方便、自重轻,能在机动车辆不便使用的地方工作,在短距离搬运较轻的物品时十分方便。推车在世界各地应用广泛,例如欧美国家中推车在人们自家和公共花园使用较多,非洲和中东国家在矿山和建筑使用较多。我国现在市场上出现的推车除了在建筑、物流和农业等场所使用外,生活中也应用较多,例如父母推运婴儿、超级市场上人们用于购物的推车等。这些推车没有电动部分,因此只能靠人力进行推车,大量消耗劳动力,降低了工作效率。
推车按照轮子数量可以分为独轮、两轮、三轮和四轮。独轮车由于只有一个轮子,可在狭窄的通道上行驶,原地也可以转向,卸货十分便利;两轮车在独轮车基础上,能够使得车体更加平稳地运行;三轮车和四轮车都有转向轮,可以方便控制运动方向,而且车体运行更加平稳。
2 智能电动小车硬件设计
2.1 电路结构
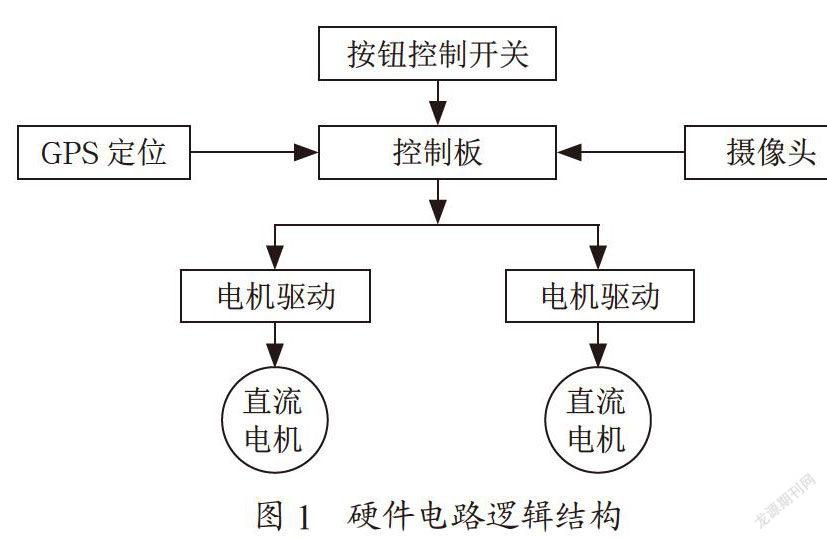
本文设计的智能电动多功能服务小车电路控制系统由按钮控制开关模块、主控模块、电机驱动模块、电机模块、GPS定位和摄像头等组成,其电路硬件逻辑方框如图1所示。
其中主控模块采用MegaPi Pro主控板,该控制板的主控芯片为其核心部件,采用的是ATMEGA2560-16AU,包含3个串口,1个I2C口和SPI口,16个模拟量输入,时钟频率16MHZ,MegaPi Pro拥有强大的编程能力,完全兼容Arduino编程,具有强大的扩展功能,该控制器符合本文的控制要求。选用OV5640型号的摄像头,其分辨率为2592*1944,像素为500W,可以直接输出jpeg格式的图像;选用WF-NEO-6M型号的GPS定位系统,可以测量经纬度和海拔的三维位置定位,选用配套的SMA GPS天线,实现定位功能;选用37mm、额定电压12V和额定转速200RPM的直流电机,配以直流电机驱动,按钮控制开关包含了前进、后退、停止、加减速功能,能够满足系统的运动要求。
2.2 机械结构
小车本体运用型材进行组装搭建,先用Solidworks软件对车体进行设计,设计的机械尺寸:车体的底盘长和宽分别是600mm和400mm,支架高为700mm,宽为400mm。在此基础上,完成车体的建模,建立车体的三维模型图,如图2所示。对于小车轮子,底部装有2个主动轮和4个从动轮,主动轮提供动力,控制小车的运动,从动轮由是万向轮,除了平稳支撑车体和方便转向外,还能在上下坡停车,最后组装完成的实物如图3所示。
3 智能电动小车软件设计
根据控制要求,本系统运动控制部分运用mBlock软件进行编程,该软件是一款集游戏制作、艺术创作、机器人控制于一体的开源编程软件,使用图形化编程方式,添加了机器人模块,使其可以驱动与Arduino电路板兼容的传感器、机器人等硬件。通过对软件编程实现了前进、后退、加减速、停止和转弯等基本运动功能。通过mBlock软件编程界面和编写的程序,实现了基本运动功能。通过Keil编程软件和串行口调试助手实现GPS定位和摄像头的数据采集功能。
整个装置完成后,其工作过程为:按下相应的键位,设置不同的工作模式,控制器接收到按键信息后,根据相应的工作模式给电机驱动模块相应的信号,驱动模块将信号放大,给直流电机电能信号,直流电机就能按照设置的工作模式进行运动。同时,GPS定位模块实现了小车的实时定位,用于实时监测小车的运行位置,摄像头记录采集的视频和图像,存储小车的行进画面,保障了小车更加稳定、安全的运行。
该装置的特点为:内置蓄电池,充电7-8小时,连续供电10小时,保障用户一天的工作和生活的需求;采用手动控制一线牵动,操作简单,便于老年人群体接受;采用万向轮,360度旋转,保障了转向灵活,运行稳定。使用机械结构进行急停,保证上、下坡时不会发生意外;内置调速结构,实现急减速功能,为用户提供更多种速度选择;安装有GPS定位系统,实现监测小车实时位置,同时摄像头可以记录小车行进图像,保障老年人用车安全。
4 结 论
本文首先简要概述了推车的历史背景及发展趋势。为了老年人出行和生活方便,本文在现有推车的基础上,设计了一款智能电动多功能服务小车。硬件上,以ATMEG A2560-16AU为控制核心,配以37mm、额定电压12V和额定转速200RPM的直流电机和配套的驱动器组成的运动,OV5640型号的500W像素的摄像头构成的图像采集部分和WF-NEO-6M模块和配套的SMA GPS天线组成的定位系统。软件上,通过mBlock和Keil编程软件对小车运动控制、摄像头采集图像和GPS定位模块进行了程序的编写。在硬件和软件完成的基础上,对實物进行了运行调试,结果表明该装置能够实现运动、图像采集和GPS定位功能。
参考文献:
[1] 杜宾宾,神东方.电动推车机连续运输在快速掘进中的应用 [J].山东煤炭科技,2018(3):102-103.
[2] 李加羽.讨论推车机车钩改造电气程序的优化 [J].山东工业技术,2016(22):110.
[3] 谢荣想.视觉下的服务接触点研究 [D].厦门:华侨大学,2018.
[4] 方饴,裴红蕾.跨障碍升降小推车建模设计 [J].内燃机与配件,2018(3):5-6.
作者简介:张苏新(1987.02-),男,汉族,江苏苏州人,讲师,电子信息工程学院教师,硕士研究生,研究方向:电气自动化技术。
猜你喜欢
电脑知识与技术(2016年30期)2017-03-06 17:12:46
现代电子技术(2017年1期)2017-02-16 11:51:27
科技视界(2016年25期)2016-11-25 19:53:52
科技视界(2016年25期)2016-11-25 09:27:34
电脑知识与技术(2016年23期)2016-11-02 22:43:24
科技视界(2016年24期)2016-10-11 12:57:04
电脑知识与技术(2016年15期)2016-07-04 19:32:00
中国科技博览(2016年10期)2016-04-29 03:33:11
电脑知识与技术(2015年35期)2016-03-07 12:09:31
电脑知识与技术(2015年31期)2016-01-05 12:28:53