
分布式双电机后驱电动汽车横摆工况下转向特性研究
2019-09-10 00:22张炜培范健文华磊
广西科技大学学报 2019年2期
关键词:电动汽车
张炜培 范健文 华磊






摘 要:本文针对双电机后轮驱动电动汽车展开研究,采用基于ACKERMNN和 JEANTAND理论建立的转向模型进行低速工况下的转向分析,根据驾驶员驾驶习惯建立了低速转向行驶模型,并与转向模型算法联合,利用matlab/simulink进行仿真,研究横摆工况下车速与前轴转向角度对车轮速度的影响特性.结果表明:在低速且转角不过大的横摆工况下,四轮轮速按理想情况分配且保持较高的控制精度,实现了电子差速效果,为双电机后驱电动汽车驱动控制系统的研究与开发提供了理论基础.
关键词:电动汽车;转向特性;横摆工况;电子差速系统
中图分类号:U469.72;U463.2 DOI:10.16375/j.cnki.cn45-1395/t.2019.02.004
0 引言
随着环境污染问题日益严重,汽车尾气作为主要污染源之一,导致汽车工业面临着严峻的挑战.而在新能源汽车领域中,电动汽车拥有节能环保,能量利用率高,结构简单等优点,加上国家政策的扶持,成为各大汽车厂商重点研发产品.新能源汽车将代替传统燃油车并占据汽车主要销售市场.
对于电动汽车而言,关键技术之一就在于其驱动系统.段敏等[1]设计出基于转矩控制的自适应电子差速控制器,基于PID控制理论以及模糊控制理论,分别对电动汽车转向时各个车轮轮速进行了仿真跟踪,实现了基本相同的控制效果,有效保证电动汽车恒、变车速下的行驶稳定性.韩麟宁[2]建立同步电机数学模型和轮毂电机直接转矩控制模型,详细描述了轮毂电机电动汽车动力学建模以及差速控制策略.将转向行驶时的操纵稳定性作为研究目标,通过滑移率对差速控制方案进行分析,最终证明该方案具有良好的差速转向性以及操纵稳定性.丁张根等[3]提出CANoe与matlab/simulink联合仿真法,通过对电动机正反控制、转速控制进行仿真建模,进而实现电动机的控制,为双电机电子差速提供了参考.
本文首先通过建立低速工况下阿克曼转向模型,得出各个车轮实际轮速算法,并对阿克曼转角大小进行综合判断;然后利用低速转向行驶模型预设符合驾驶员遇实际弯道时转向的情况,在MATLAB/simulink中进行仿真,调整转向角与车速大小,分析不同车速及转向角对各轮速产生的影响.
1 电动汽车驱动系统构成
电动汽车的驱动系统按照电机数量来分,可分为单电机驱动系统、双电机驱动系统和多电机驱动系统.单电机驱动系统使用传统的机械式差速器,使得汽车在转向时内外侧车轮滑转率不超过规定范围,保证汽车操纵稳定性,但存在机械传递效率低,响应慢等问题.双电机和多电机驱动系统可通过减速装置或者直接安装在车轮内,驱动汽车前进,使汽车转向性能更灵活[4].为满足电动汽车低速转向的要求,本文选择直接驱动方式,该方式与一般电动机不同,转子放置在外部.汽车转向时电机能够产生较大的转矩,为了保证汽车的动力性,该电机有较宽的调速范围.
分布式双电机后轮驱动结构,如图1所示,两个永磁同步电动机(PMSM)分别置于左后轮与右后轮内,两前轮负责响应转向盘转向角度,两后轮进行驱动.整车控制器能够接收各控制器及传感器发来的信号,同时可将处理后的信号发给电机控制器,对驱动电机进行综合控制.
2 差速模型建立
2.1 各车轮轮速分析
本文采用阿克曼转向模型进行差速分析.根据ACKERMNN理论,假设车体为刚性系统,前轮定位角为零,且行驶中无侧向力作用,建立车辆转向模型.如图2所示,其中,在车辆转向工况时,四个车轮距离车辆瞬时转向中心A点的距离分别为[R1、R2、R3、R4],左前轮及右前轮转向角分别为[δ1]和[δ2],[δ]为ACKERMNN转角,与前轴中心处转向角度相同,速度V为车辆的实际速度,L为前后轴距,S为轮距[5].
使用ACKERMNN转向模型的理想条件为[6]:
1)车体本身为刚体;
2)只考虑车轮纯滚动状态;
3)不考虑轮胎材质与结构上的非线性以及侧向弹性系数的变化;
4)四个车轮的型号及大小相同.
由图2可知:
[r=L/tanδR3=L/tanδ1R4=L/tanδ2]
由此可得[tanδ1、tanδ2]的表达式为:
[tanδ1=L/R3=2Ltanδ/(2L-Stanδ)tanδ2=L/R4=2Ltanδ/(2L+Stanδ)]
則可得出左、右前轮转向半径:
[R1=R23+L2=(L/tanδ-S/2)2+L2R2=R24+L2=(L/tanδ+S/2)2+L2]
由瞬心定理可得:[VR=V1R1=V2R2=V3R3=V4R4],各车轮轮速分别为[7]:
[V1=VL2+(L/tanδ-S/2)2B2+(L/tanδ)2V2=VL2+(L/tanδ+S/2)2B2+(L/tanδ)2V3=V(L/tanδ-S/2)B2+(L/tanδ)2V4=V(L/tanδ+S/2)B2+(L/tanδ)2]
2.2 前轴转向角分析
在上式中,应满足条件:
[L/tanδ-S/2≥0]
否则[R3<0],不符合实际情况.[δ=74.4°],此角度为上限值,[δmax1=δ≥δi].
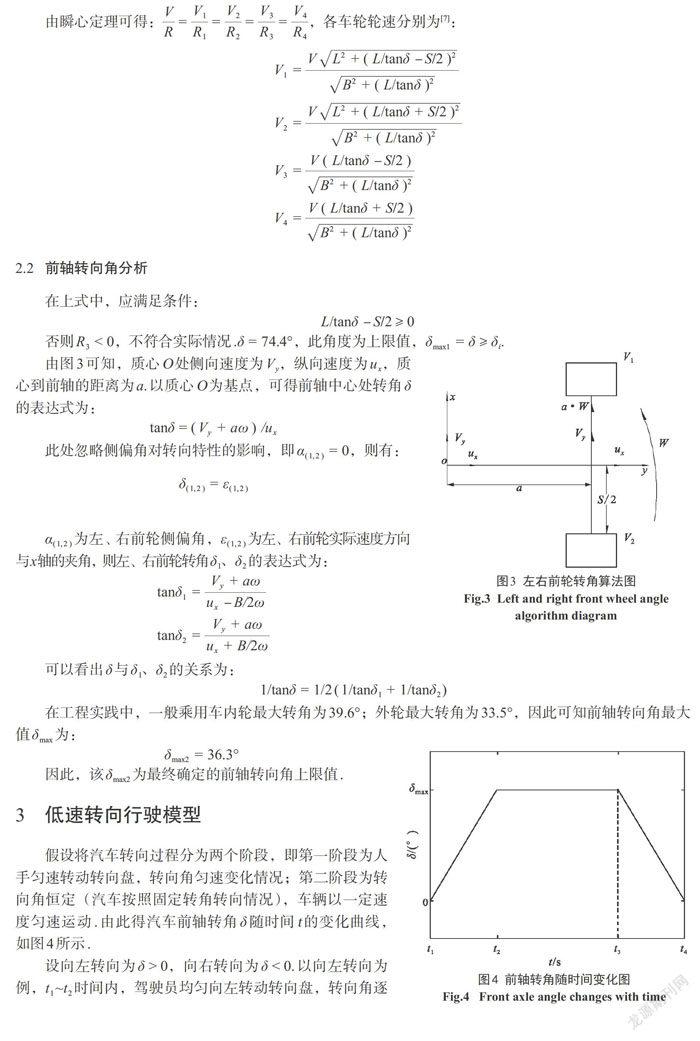
由图3可知,质心O处侧向速度为[Vy],纵向速度为[ux],质心到前轴的距离为a.以质心O为基点,可得前轴中心处转角[δ]的表达式为:
[tanδ=(Vy+aω)/ux]
此处忽略侧偏角对转向特性的影响,即[α(1,2)=0],则有:
[δ(1,2)=ε(1,2)]
[α(1,2)]为左、右前轮侧偏角,[ε(1,2)]为左、右前轮实际速度方向与x轴的夹角,则左、右前轮转角[δ1、δ2]的表达式为:
[tanδ1=Vy+aωux-B/2ωtanδ2=Vy+aωux+B/2ω]
可以看出[δ]与[δ1、δ2]的关系为:
[1/tanδ=1/2(1/tanδ1+1/tanδ2)]
在工程实践中,一般乘用车内轮最大转角为[39.6°];外轮最大转角为[33.5°],因此可知前轴转向角最大值[δmax]为:
[δmax2=36.3°]
因此,该[δmax2]为最终确定的前轴转向角上限值.
3 低速转向行驶模型
假设将汽车转向过程分为两个阶段,即第一阶段为人手匀速转动转向盘,转向角匀速变化情况;第二阶段为转向角恒定(汽车按照固定转角转向情况),车辆以一定速度匀速运动.由此得汽车前轴转角[δ]随时间t的变化曲线,如图4所示.
设向左转向为[δ>0],向右转向为[δ<0].以向左转向为例,[t1~t2]时间内,驾驶员均匀向左转动转向盘,转向角逐渐增大,且[δ1>δ2],[δ>0],直至[t1]时间点,此时转向角出现最大值[δmax].
[t2~t3]时间内,转向角[δ]不变,始终保持[δmax]角度转向,且[δ1>δ2],[δ>0],直至[t3].
[t3~t4]时间内,驾驶员均匀回正转向盘,转向角逐渐减小,且[δ1>δ2],[δ>0],直至[t4]时刻,完全回正转向盘,此时转向角为0.
向右转向同理.
该低速转向模型以一般驾驶员的驾驶习惯为准,符合实际情况.
[δ=k1t , t1≤t<t2k1t2 , t2≤t<t3k1t2(t4-t)t4-t3 , t3≤t<t4]
4 基于matlab/simulink建模仿真及结果分析
4.1 建模仿真
本文选取来自东风柳州汽车公司的景逸系列某车型试验车作为目标车型,其前、后轴轴距L=2.7 m,左、右侧轮距S=1.5 m,质心到后轴的距离B=1.5 m.基于matlab/simulink平台下建立的转向控制仿真模型如图5所示.
根据驾驶员的驾驶习惯,本文假设在电动汽车遇到不同条件的弯道并进行转向时,横摆角速度[ω]不变,由国标GB/T6323-2014规定可知,横摆角速度测量范围为[±50 °/s][8].本文研究的低速转向工况适用于一般城市道路工况,根据《道路转弯半径的要求和计算》可知,城市道路交叉口转弯半径为[9]:
1)非主次道路 10~20 m;
2)次干道 15~20 m;
3)主干道 20~30 m.
在城市中行驶,电动汽车的转向特性必须满足所有弯道最小转向半径的要求,因此选择非主次道路10 m为转弯半径.以本文假设的较低车速8 m/s为转向时的车速,可得横摆角速度[ω=45.8°/s],符合国家标准GB/T6323-2014对横摆角速度范围的规定.
4.2 仿真结果分析
以向左转向为例,由转向角范围[0≤δ≤36.3°],分别以[20°、25°、30°]为[δ]转向角进行输入,由于本文主要研究低速转向工况,此处忽略转向行驶前电动汽车直行减速部分.以[8 m/s]为参考车速,进行仿真,得到随转角变化时四个车轮轮速的变化情况,仿真结果如图6所示.图6(a)、(b)、(c)分别是转向角为 [20°、25°、30°]时,各轮速随时间的变化情况.
[t1]时电动汽车开始进行横摆动作,由于右后轮毂电机转速增加,使得两外侧轮相对于车速V轮速增加,且外侧轮[V2]加速度逐漸增加,[V4]加速度逐渐减小;左后轮毂电机转速减小,使得两内侧轮相对于车速V轮速减小,且内侧轮[V3]减速度逐渐增大,内侧轮[V1]减速度减小,从而产生差速,使汽车进行横摆动作.达到[t2]时,横摆角保持恒定,外侧轮达到速度最大值,内侧轮达到速度最小值.直至[t3]时,驾驶员开始回正转向盘,外侧轮速度开始减小,内侧轮速度增大,最终四轮轮速等于车速.
5 总结
轮毂电机驱动电动汽车与带传统机械差速器的汽车相比,横摆运动更为灵活,响应时间明显缩短.预设的低速转向行驶模型符合实际减速转向情况,将ACKERMNN转向模型与低速转向行驶模型进行联合运算后,通过simulink仿真得到的结果可以看出,为满足弯道角度较小的城市道路转向要求,前轴转向角在[20°、25°]时,得到了较为理想的四轮轮速仿真结果.但当转向角增大到[30°]时,驾驶员转动转向盘的过程中,左前轮轮速出现小幅度回升,导致电动汽车转向不足.因此该模型适用于低速下,转角不过大的横摆工况,并在该工况下可保证较高的控制精度,通过减速器与车轮的传动比,可得到双电机参考转速.
参考文献
[1] 段敏,孙明江,闫鹏斌,等.后轮轮毂电机驱动电动汽车电子差速控制器研究[J].辽宁工业大学学报,2016,36(3):184-190,210.
[2] 韩麟宁.基于电子差速的轮毂电机驱动控制研究[D].锦州:辽宁工业大学,2014.
[3] 丁张根,罗文广.基于CANoe-MATLAB的电动机仿真控制的研究[J].广西科技大学学报,2014,25(2):58-63.
[4] 赵艳娥,张建武.轮毂电机驱动电动汽车电子差速系统研究[J].系统仿真学报,2008,20(18):4767-4771,4775.
[5] YILDIRIM M,OKSUZTEPE E,TANYERI B,et al.Electronic differential system for an electric vehicle with in-wheel motor[C].International Conference on Electrical and Electronics Engineering,2016.
[6] 吳海兵,卢营蓬,蒋猛.后轮毂电机独立驱动电动车的控制系统研究[J].微电机,2013,46(12):35-38.
[7] 华磊,张成涛,陆文祺,等.轮毂电机电动汽车电子差速低速转向控制仿真[J].广西科技大学学报,2018,29(3):77-81.
[8] 中华人民共和国工业和信息化部.汽车操纵稳定性试验方法:GB/T 6323-2014[S].北京:中国标准出版社,2014.
[9] 武一琦.火力发电厂厂址选择与总图运输设计[M].北京:中国电力出版社,2006.
Research on steering characteristics of distributed dual-motor rear-drive electric vehicle under yaw condition
ZHANG Weipei1,2, FAN Jianwen*1,2, HUA Lei1,2
(1.School of Automobile and Traffic Engineering, Guangxi University of Science and Technology, Liuzhou 545006, China; 2.Guangxi Key Laboratory of Automobile Components and Vehicle Technology (Guangxi
University of Science and Technology), Liuzhou 545006, China)
Abstract: In this paper, the research on dual-motor rear-wheel drive electric vehicles is carried out. The steering model based on ACKERMNN and JEANTAND theory is used to analyze the steering under low-speed conditions. The low-speed steering model is established according to the driver's driving habits, and combined with the steering model algorithm. The simulation was carried out by using matlab/simulink to study the influence of the vehicle speed and the front axle steering angle on the wheel speed under the yaw condition. The results show that under the low-speed and wide-angle yaw conditions, the four-wheel speed is distributed according to the ideal situation and maintains high control precision, realizing the electronic differential effect. The study provides a theoretical basis for the research of the dual-motor rear-drive electric vehicle drive control system.
Key words: electric vehicle; steering characteristics; yaw condition; electronic differential system
猜你喜欢
内燃机与配件(2022年2期)2022-01-17
汽车博览(2019年6期)2019-06-03
领导文萃(2016年20期)2016-10-26
人民周刊(2016年11期)2016-06-30
世界知识(2016年5期)2016-05-14
投资北京(2016年6期)2016-05-14
世界汽车(2015年3期)2015-09-10
计算机应用文摘·触控(2014年4期)2014-02-22
