轻便型变形监测雷达的研制与基本性能测试
2019-09-09 04:45:38姚宜斌邹进贵徐进军
测绘工程 2019年5期
张 涛,姚宜斌,邹进贵,3,周 吕,徐进军
(1.武汉大学 测绘学院 ,湖北 武汉 430079;2. 武汉大学 测绘仪器设备研发中心,湖北 武汉 430079;3.武汉大学 测绘国家级实验教学示范中心, 湖北 武汉 430079)
在建筑物变形监测、边坡、大坝、桥梁监测以及自然灾害监测中,变形监测雷达是一种重要而且有效的监测手段,其一般采用干涉测量技术,具有观测距离远、精度高、受天气影响小、不受光照条件限制等优点[1-2]。比较有代表性的意大利IDS公司的IBIS系统(目前已经被HEXAGON收购),IBIS系统有两种模式工作,即IBIS-L和IBIS-S,当以IBIS-L模式工作的时候,进行二维的变形监测[1],但是系统重量超过150 kg,必须依赖庞大而且笨重的2 m轨道运行,运输不太不便,外业操作的时候,至少需要5个人才能完成;当以IBIS-S模式工作时,可以进行一维的变形监测[2],此时系统的重量仍然有50 kg,难以实现野外单人作业。虽然该系统精度很高,但是操作的不便利性阻碍系统的应用。另外,大致上与IBIS结构类似,为提高方位向分辨率,有些产品甚至还配置3 m长的轨道,运输使用更为不便,有些产品在重量上有些缩减,但是功耗仍然有几十瓦。
在对用户进行调查分析后,不使用笨重庞大的轨道,采用非成像雷达完成很多微变形监测工作,由于缺乏方位向的分辨能力,导致处于同一距离、不同方位的目标点无法分离,对使用效果有影响。然而现有的变形监测雷达设备在不使用轨道的时候,自身重量和体积仍然较大,给使用造成障碍。针对这种状况,我院研制了一种轻便型变形监测雷达,其特点是超轻便、超低功耗,达到单人轻松完成操作的效果,一方面作为一种新型测绘设备,可以在工程应用中推广,另一方面可以作为教学仪器,让学生深入了解,动手操作,提高学生掌握先进精密测量仪器的能力,适应新时代测绘人才需求。
经过前期调研、设计、制作、改进,目前自制的轻便型变形监测雷达的结构已经基本固定。本文通过一系列实验,对其性能进行初步评估,结果证明,其性能可以满足大多数工程需要,可以应用于建筑物变形监测,也可以用于大坝、桥梁、边坡等目标的远程监测,也可以用于教学科研。
1 轻便型变形监测雷达的原理以及实现简述
为避免涉及对器件的高精度时间要求,轻便型变形监测雷达采用线性调频等幅波( Linear Frequency Modulation Continuous Wave ,LFMCW)模式,使用的信号表达式为[3]
s(t)=rect(t/T)exp{jπKt2}.
(1)
式中:信号持续时间为T,s;振幅为常量;K是线性调制率,Hz/s;K与T的乘积即为带宽;t为时间。而实际上,射频电路发射的只有实信号,因此,只需讨论:
s(t)=sin(2π(Kt+fs)t).
(2)
在CPU(Central Processing Unit ,中央处理器)的控制下,系统周期性发射LFMCW信号,同时接收目标的反射电波,由于电磁波从发射到目标反射回接收天线以光速c进行传播,假设目标反射回来的延迟时间为td,目标的距离为distancedist,则
td=2(dist/c).
(3)
将接收到的反射电磁波与正在发射的电磁波进行混频操作,即可得到两种电磁波的和频与差频,和频频率太高,没有处理的意义,被滤除,而差频反映目标的距离。
目标的反射信号频率与此时发射信号频率的差频fdiff为
fdiff=tdK,
(4)
由式(3)和式(4)可得
dist=cfdiff/(2K).
(5)
由离散时域到频域的转换可以通过离散傅里叶变换(Discrete Fourier Transform,DFT)实现。这样距离分辨率很低的,采用10 Mhz的采样率,信号持续时间以及采样时间1 ms,K为300 GHz/s,那么DFT后的频率阱数量为5 000个,最远的探测距离为7 500 m,对应的距离分辨率为1.5 m。显然,距离分辨率远远达不到微变形监测的要求,因此如果要得到微变形的测量结果,必须采用干涉测量技术,这要求在不同时间的测量中,反射电磁波是相干的,而微变形监测雷达实现精密的宽带矢量网络分析仪,通过测量信号的相位差Δφ即可求得微小的变形量Δr:
Δr=Δφλ/4π.
(6)
雷达所使用的频段与其特性直接相关。L波段与S波段易于实现,但是波长太长,天线尺寸不易小;而X波段和Ku、Ka、K波段的天线可以做得更小,但是高频微波器件采购上限制较多,因此制作阻碍较大。因此经过权衡,本雷达采用C波段。
天线在电磁波测距测量中的作用十分重要,在设备研制的过程中,曾经尝试过多种天线,实践证明,patch天线阵列与波导喇叭天线比较适合,实际使用中可以根据具体要求来选择。
其系统框图如图1所示。整个系统由片上系统(System On Chip,SOC)调度控制,SOC控制PLL/VCO锁相环和压控振荡器产生线性调制的等幅信号,经过Coupler的时候,大部分信号送至PA功率放大器,然后经由TX Antenna发射天线发射出去,另有小部分信号耦合到Mixer混频器。目标反射回来的信号先由RX Antenna接收,经过LNA低噪声放大器放大后送至Mixer混频器,与Coupler耦合过来的信号混频,得到反映目标距离的中频信号,该信号经过IF Amp中频放大器LPF低通滤波器,送至SOC的ADC模数转换器口数字化。数字信号经过SOC做信号调理以及预处理后,通过USB端口送至计算机进行后处理。
计算机主要负责对采集到的数据进行后处理,以得到所需要的结果。处理过程中,傅里叶变换、逆傅里叶变换、滤波处理以及矩阵运算占很大的运算量,这些运算在占用CPU的同时,还会使用大量的内存,因此需要合理配置数据处理用的计算机。

图1 变形监测雷达结构框图
轻型变形监测雷达整体外观如图2所示,该图同时展示做实验时的实际场景。

图2 轻型变形监测雷达整体外观
2 对轻便型变形监测雷达的性能评估以及在建筑物变形监测方面的应用实验
2.1 基本参数
为测试雷达的性能,首先对其进行基本的物理参数和电参数测定:
外形尺寸:长330 mm,宽250 mm,高130 mm;
重量:5 kg(含内置电池、天线);
待机功耗为:5 W;
电池续航时间:24 h;
外接电源:AC 220 V,DC12.6 V,太阳能电池;
工作频段:C波段;
最高采样率:500 Hz。
目前同类产品,在重量与外形尺寸以及功耗上,轻型变形监测雷达有明显的优势,方便携带,其功耗很低,可以用一块20 W的太阳能电池直接供电,20 W太阳能电池的面积一般只要0.1 m2。
2.2 精度实验
实验地点:武汉大学测绘学院4楼楼顶。
实验方法:将轻便变形监测雷达对准20 m距离处的角反射器,角反射器置于电控精密位移平台上,电控位移平台受控移动,将测量结果与实际位移量进行比对,即可对仪器的精度进行一定程度上的衡量。
干孔作业具有施工速度快,工艺简单,对环境无污染等特点,一般分为机械成孔和人工挖孔。人工挖孔桩一般需要做刚性护壁,孔径一般在0.8~2.5m,孔深一般不大于30m;机械干作业成孔一般采用长螺旋钻(小直径桩)或旋挖钻(大直径桩),适用于地层条件简单的粉土、黏土、黄土、砂砾及风化岩层,孔深一般50m以内且高于地下水位至少2~5m。
实验1,由电控精密位移平台驱动角反射器步进0.1 mm的位移,每秒一次,一共移动4次,测量的结果如图3所示。(注意:由于电控精密位移平台的时间延迟并不准确,因此时间对应关系有些错乱)。

图3 实验1(单次步进0.1 mm,累计步进4次)的结果
轻便型变形监测雷达可以准确测量目标0.1 mm的位移量,由图3还可以看出,测量噪声幅度较小,经提取静止部分的数据进行分析,噪声水平为0.013 mm(均方根)。
实验2,由电控精密位移平台驱动角反射器进行连续位移,速度0.5 mm/s,行程5 mm,到达终点后,暂停2 s,然后再以相同的速度返回原始位置。测量的结果如图4所示。
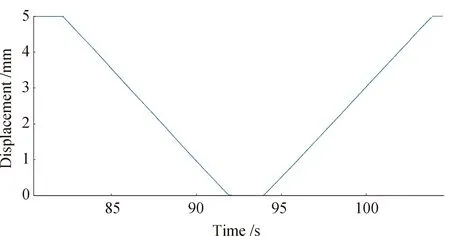
图4 实验2(连续以0.5 mm/s的速度移动)的结果
测量结果准确反映目标的位移情况,测量结果呈现良好的线性,测量结果也能准确反映电控位移平台归位后的状态。
图5是实验2中测量数据的局部放大,以展示测量噪声的水平。可见测量噪声水平远小于当前所认可的测量精度(0.1mm),测量结果是可信的。

图5 实验2结果的局部放大,用以展示测量噪声
实验3,由电控精密位移平台驱动角反射器进行连续位移,速度5.0 mm/s,行程10 mm,到达终点后,暂停2 s,然后再以相同的速度返回原始位置。测量的结果如图6所示。
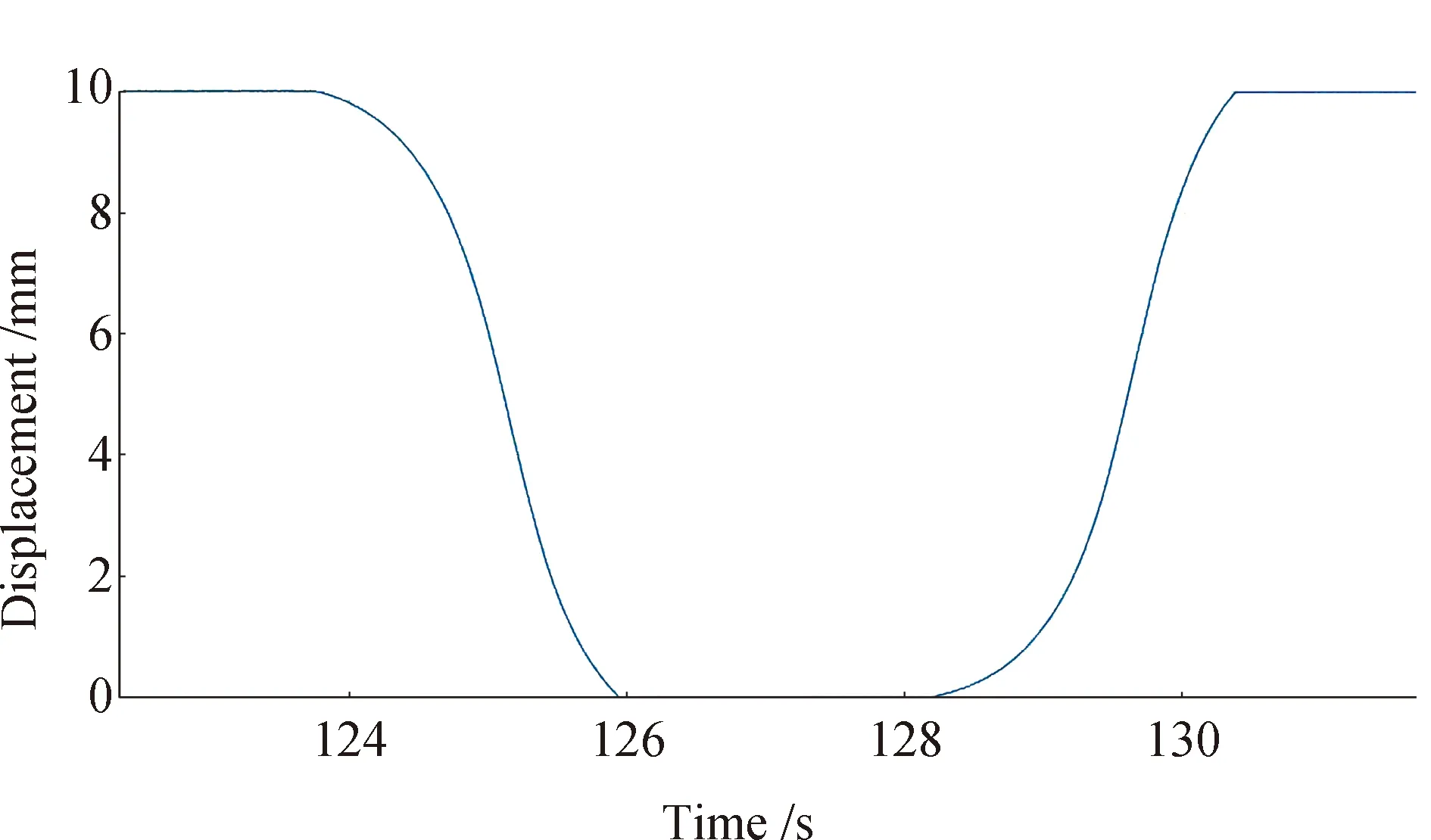
图6 实验3(连续以5 mm/s的速度移动)的结果
测量结果准确反映目标的位移情况,测量结果显示,目标的移动速度并非恒定,呈现曲线,电动精密位移平台为了减少振动,采用逐步加速减速机制,该雷达的测量结果不仅反映目标的位移,反映目标的速度(位移曲线的切线即为速度)。最后,测量结果也能准确反映电控位移平台归位后的状态。
图7是实验3中测量数据的局部放大,以展示测量噪声的水平。
图7 实验3结果的局部放大
2.3 轻便型位移监测雷达在建筑物变形监测方面的应用实验
实验地点:武汉大学测绘学院4楼楼顶;
实验方法:将雷达对准需要观测的目标,记录一段时间的数据,分析其位移状况;
实验 4,对武汉大学信息学部校园内两个不同建筑物(2号教学楼和大学生活动中心)的监测(见图8),图8所示为距离,m。从监测结果中可以看到,38.62 m处是4层教学办公楼,较为稳定,晃动较小,观测期间晃动范围不超过0.5 mm。而96.88 m(橙色)和97.43 m处(蓝色)是大学生活动中心,结构特殊,单层层高较一般建筑高得多、跨度大、支撑少,因此晃动比同高的一般建筑物要大,最大晃动幅度超过2 mm。

图8 实验4测量结果
由实验结果可见,该轻型变形监测雷达的监测数据是合理的。
实验5,在地铁运行期间,对地铁沿线的3个不同的建筑物进行监测,3个建筑物的分布如图9所示,分别距离观测点473 m、791 m、866 m,持续监测时间700 s,数据经过小波降噪处理,以去除高频成分,结果如图10所示。可以看到,3个建筑物呈现规律性的晃动,最大幅度为1 mm左右,866 m处的建筑物晃动幅度较小,猜测原因是其距离地铁线路较远,而且地基结构呈L形,较为稳固。3个建筑物的晃动周期大致与地铁运行周期相符(180 s左右),由于建筑物在地铁沿线不同位置,而且高度不同,因此波峰位置有时间差。从这个实验的结果看,猜测3个建筑物的规律性的晃动可能与地铁运行有一定关系,但由于本实验的目的是验证雷达的可用性,而并非总结建筑物变形规律甚至发现晃动状况与地铁运行的关系,因此暂未采集更多的数据对猜测进一步验证。

图9 实验5中的观测点与观测目标平面图

图10 实验5的测量结果
实验1~实验5说明该轻型变形监测雷达可以用于建筑物变形监测,其观测范围大(从20~866 m),精度高(0.1 mm),噪声水平低,数据质量高,操作也比较简单,一般情况下无须在目标上安装标靶(实验1~3为了准确捕捉目标,使用角反射器,而在对实际建筑物的监测实验,即实验4和实验5中,直接对目标进行观测,未在目标上安装任何标靶)。同样的原理,该雷达不仅可以用于建筑物变形监测[6],也可以用于岩体[7]、大坝[8]、边坡[9-10]、桥梁[11]等目标的非接触式远程监测。
注:以上试验结果均未考虑大气影响,仅为监测仪器的功能和性能。在实际应用中,大气影响对电磁波测距的结果影响不能忽略[12]。
另外,在实验过程中还有一个意外收获。在实验间歇时,发现附近有玩具四旋翼无人机升空,于是便将雷达对准了无人机的方向,直到无人机飞远,肉眼已经不可见,雷达仍然可以探测到,最远探测距离可达300 m。
3 结束语
从以上的实验可以看出,本院研制成功的轻型变形监测雷达,具备体积小、重量轻、耗电省的优势,解决现有同类产品便携性差的问题,拓展可用性。同时,该雷达测距精度达到0.1 mm,测量范围超过800 m,测量噪声低,数据质量高,可以满足一般的建筑物变形监测、大坝、桥梁监测、灾害预警、工程需求,但是为保证精度,必须考虑气象纠正。在设计上,也充分考虑成本问题,以便于普及应用于工程以及教学与科研。作为拓展应用,该雷达还可以作为无人飞行器的探测。另外,由于其体积和重量以及功耗上的优势,使其具备作为廉价民用无人飞行器的载荷的可能,以便进行超低空机载合成孔径雷达成像作业,将民用无人机传感器的探测手段拓展到微波雷达。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
铁道建筑技术(2021年4期)2021-07-21 05:33:36
中华诗词(2020年1期)2020-09-21 09:24:52
小学生学习指导(低年级)(2019年9期)2019-09-25 07:43:18
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
小学生作文(中高年级适用)(2018年5期)2018-06-11 01:22:56
中学生数理化·七年级数学人教版(2017年11期)2017-04-23 07:18:00
数学大王·中高年级(2016年12期)2016-12-26 21:37:36
火控雷达技术(2016年3期)2016-02-06 02:30:26
小天使·二年级语数英综合(2015年12期)2015-12-04 16:36:12