
数据驱动下的交通治理核心技术
2019-09-06 06:33李晨毓龚越刘烨经维维
中国公共安全 2019年7期
□ 文/李晨毓 龚越 刘烨 经维维
作者单位:李晨毓、龚越、刘烨,杭州海康威视数字技术股份有限公司;经维维,同济大学交通运输工程学院
城市交通技术发展可追溯至上个世纪80年代,40年来,我国交通人孜孜不倦,从交通规划到交通工程,从交通管理到交通控制,交通理论与技术皆取得重大突破。交通再思考希冀交通技术发展回望本源,审视交通技术发展的初心:交通之于民众即为出行,交通可达性现阶段已大为改善,交通拥堵与出行安全成为民众关心的重要命题;交通之于政府即为服务,涉及到城市规划、交通用地、工程建设、综合管控、交通执法等,如何统筹博弈至各方效益最优是焦点所在。近年来,交通理论受大数据、人工智能、物联网等技术影响不断深化演变,但如何运用先进技术刻画交通内涵、发现交通运行肌理,未有突破进展。
因此,交通治理理念开始崭露头角。交通治理是城市治理[1]的分支,它是一个持续的过程,应由政府、企业、民众、第三机构广泛参与。我国在交通治理方面的尝试更多以交通建设付诸实施,源于早期我国交通基础设施较发达国家远远落后,随着交通建设的推进,交通治理逐步走向突破阶段,交通管理与运维、先进技术在交通领域的深度应用、交通法制逐步健全、多部门协作治理等成为交通治理进一步发展的风向标。
本文结合交通工程、数据应用等阐述获取海量交通数据背景下,交通治理与数据应如何融合,从宏、中、微观层面给出一些应用思考及实践,希冀可以通过实际的数据应用解决一定的交通问题。
数据在宏观交通治理上的应用
宏观交通治理是指在城市或片区级别范围内找寻交通整体运行的潜在规律和逻辑,进而通过宏观数据分析挖掘给出解决方案。由于数据来源和属性的限制,本节主要针对以下两个方面给出研究方法与研究成果。
交通OD特征分析
交通流时空特征直观了解城市交通的出行规律,掌握城市高峰、平峰及潮汐现象,交通OD特征可以了解交通产生与吸引特征,进而发现过境与停车交通的发生规律。
1)数据来源与计算方法
通过城市道路部署的电子警察、卡口、视频流量检测设备,利用经过某个设备点位的拍摄视频结构化处理后,得到途径车辆的车牌、方向信息,在系统中将不同点位设备拍摄到的车辆车牌数据进行关联,算出车辆行驶轨迹,进而汇聚某个时段在某个区域内所有车辆的轨迹信息,对轨迹进行叠加统计分析后,得到城市道路交通在该区域分方向交通流空间特征及分时段的交通流时间特征,同时得到交通发生、吸引、过境的交通流规律。
2)数据诊断及实施方案
在J市部署交通溯源分析系统,从典型区域入手,利用高清卡口摄像机实现对区域内每一个卡口过车点的车牌采集,提取车辆出行链,保留路径数据,清洗冗余信息,分别配对起、终点,统计和可视化展示后如图2-1~图2-2,其中车辆发生点、吸引点识别由自研聚类算法计算,图中圆圈代表一个卡口,圆圈大小表示由该卡口产生或吸引的车辆数量多少。

▲图2-1早高峰交通源数据统计

▲图2-2 早高峰交通期望线
对该区域的车流OD进行特征提取后发现,早高峰东西向是车辆主流向,远高于南北车流量;东西流量大且不均衡,方向不均衡系数高;该区域吸引力不足,过境车流占据支配地位,见图2-3~图2-4。

▲图2-3(a) 早高峰区域内交通发生源

▲图2-3(b) 早高峰区域内交通吸引源

▲图2-4(a) 早高峰驶入过境流量
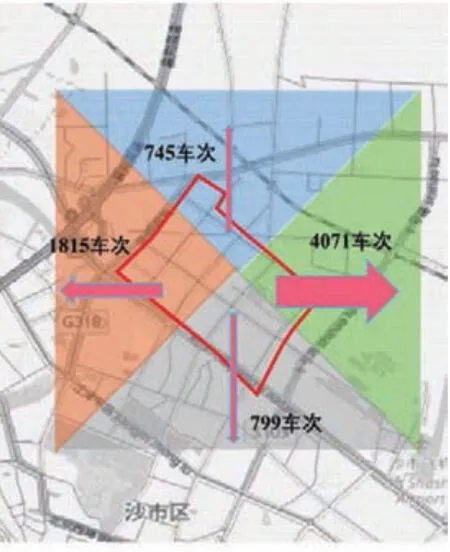
▲图2-4(b) 早高峰驶出过境流量
提出该区域治理对策,东西向道路红线已有但未建设到位,打通东西向断头路,同时主要东西向道路设置分隔设施;早高峰骨干道路设置潮汐车道,有条件实行东西单行道管制;进入区域前设置诱导屏引导绕行;区域信号控制策略快进快出,东西向道路有条件实行双向绿波控制。
城市交叉口群划分与仿真方案
数据来源与计算方法
交叉口群划分最重要的指标是关联度,它是衡量道路网络中交叉口之间的相互关系强弱性的指标,关联度与交叉口信号相位、路径流量的不均匀性、交叉口间距、交叉口排队长度等因素有关。通过信号机提供信号相位信息,视频检测器提供排队长度、车流量、平均车速等指标,交叉口间隔由开源的电子地图或自制电子地图得到,参考美国《交通控制手册》及国内专家的研究结论[2],自研交叉口关联度算法,对邻接交叉口关联度进行计算,形成关联度矩阵,识别关联交叉口,发现关键路径,同时对交叉口群进行划分。
数据诊断及仿真方案
建立B市路网的抽象仿真模型,省去道路相关要素,仅保留路段长度与双向交通流量,见图2-5;通过视频检测器采集的交通流量及排队长度,在自研的交通一体化引擎中进行计算,生成交叉口关联度矩阵见图2-6。

▲图2-5 路网建模与交通流量加载

▲图2-6 交叉口关联度矩阵计算

▲图2-7 关键路段识别

▲图2-8 区域治理方案
根据关联度矩阵,结合路网各个路段间的流量,进一步挖掘出可关联的路段(图2-7),执行不同的干线协调控制策略,同时在高负荷路段且关键路段上游设置诱导屏,将车流引导至低流量路段使得路网均衡(图2-8),对非关联交叉口且饱和度较高的交叉口实施工程设计优化与改造。关联度矩阵与流量融合后,也可以算出关键路径,进而依据道路方向不均衡系统对关键路径的车道进行重新分配,比如设置可变车道等。
数据在中观交通治理上的应用
中观交通治理是指在城市单条道路组成的城市街区或若干条道路组成的小范围路网内发现交通问题,进而通过中观数据分析挖掘给出解决方案。本节主要针对以下两个方面给出研究方法与研究成果。
交通拥堵路段识别与路段平顺度分析
1)数据来源与计算方法
交通拥堵路段多采用饱和度指标(V/C)或行驶车速(V)指标判断,通过对拥堵路段识别,排查拥堵成因,找出交通症结,采取治理对策。以上指标涉及小时交通流量(Vol/h)、平均行驶车速()、瞬时行驶车速(V)。视频检测器和雷达可实时采集排队长度、车流量、平均行驶车速、瞬时行驶车速等数据,很容易计算路段饱和度指标。
路段平顺度指两个相邻交叉口之间的路段内,车辆保持某一稳定状态行驶的连续性,路段平顺度不仅能够对道路运行环境(空间环境、交通流环境、交通管理环境、交通视觉环境等)进行评价,同时可以优化不同模型下的出入口交通组织。平顺度指标与车辆行驶轨迹(动态坐标、偏离主方向夹角)和瞬时车速(V)相关[3][4]。通过视频检测器与雷达可以获取瞬时车速并校核车辆轨迹数据,也可以从第三方平台获取浮动车数据。
2)数据诊断及实施方案
S市主干路路段,3块板,双向4快2慢,南侧④⑤⑥⑦机非分隔带开口,用地性质办公;北侧⑧⑨⑩机非分隔带开口,用地性质居住,见图3-1。折减后计算得到路段北侧通行能力1456pcu/h,路段南侧1238pcu/h;视频检测器采集到周一早高峰路段北段小时流量1159pcu/h,南侧686pcu/h,算出路段北侧服务水平D,南侧服务水平B,指标显示尚可,但车均延误时间仍较长。

▲图3-1 城市主干路CAD模型绘制
获取第三方平台浮动车速度数据发现,道路北侧车辆瞬时速度最小值接近于0,最大值超过50km/h,车速波动较大,见图3-2;根据浮动车GPS动态坐标,绘制车辆每3s的轨迹,同时提取车辆行驶的纵向瞬时速度,横向瞬时速度,偏离角度和角速度,计算车辆在路段北侧、南侧行驶的平顺度指标见表3-1。

▲图3-2 道路北侧小时瞬时车速分布图

表 3-1 路段平顺性指标
指标发现路段北侧指标均较高,表示车辆行驶过程中受出入口车辆干扰较为严重,主要集中在⑨开口处,提出以下路段优化方案(图3-3):由于⑤⑩开口在路段中游且互为对称,结合行人过街,允许车辆左转;开口⑥左转车流对于主路干扰不大,允许左转;开口④⑦⑧左转车流对于主路干扰较大,右进右出;开口⑨与⑧合并;同时完善公交标线,增设违停抓拍。
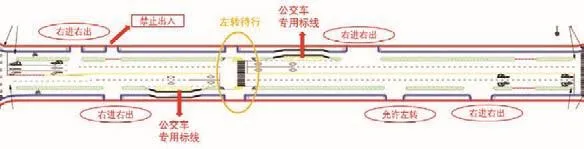
▲图3-3 路段改善方案
动态干线协调控制技术与治理实践
1)数据来源与计算方法
静态绿波技术在现有干线协调中运用较多,其显著特点是根据历史交通流及排队长度等统计数据,预先制定固定配时方案,分时段进行控制。而动态绿波技术根据采集的实时数据自动优化绿波方案,相比静态绿波技术,动态绿波可以更好地适应不断变化的路面交通状态,其核心理念是通过对速度和距离等价变换来确定公共信号周期范围,进而寻找最接近实际交叉口的理想间距,以偏移绿信比筛选最佳相位设置,最后计算信号配时。动态绿波需要采集的数据包含静态数据与动态数据,静态数据包括交叉口渠化,交通路网与交叉口间距等,采集方式简单;动态数据包括分车道分方向交通流量(Vol/l/5min)、车辆平均速度()与瞬时速度(V)、分车道排队长度(L/l),由于动态绿波技术对采集数据质量要求很高,建议多源数据融合,比如雷达数据与视频数据相互校准,以保证数据质量。
2)数据诊断及实施方案
Q市主干路双向六车道,沿线分别与主、次干路相接,有信号控制的交叉口进口道均有渠化展宽,交叉口均部署有雷达检测设备与反向卡口设备,抽象后的路网示意图见图3-4。

▲图3-4 动态绿波道路渠化示意图
以西港路-秦皇大街为例,通过雷达与视频结合采集交通流量,早高峰西向东流量4300pcu/h,东向西流量3000puc/h,对卡口数据、雷达数据进行校核后,数据融合完整度提升4%,弥补数据丢包等造成的系统不稳定,见图3-5。通过分析雷达流量与卡口流量的一致性,见图3-6,及时发现数据异常,避免数据问题导致方案失效,提高动态绿波系统的稳定性。
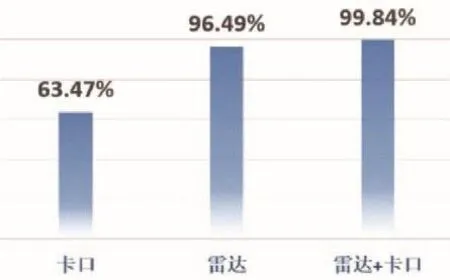
▲图3-5 卡口与雷达数据校核

▲图3-6 卡口与雷达数据异常检测
多源数据融合技术在动态绿波方案中得到了充分的体现和应用,设置绿波带速(建议行驶车速)为40km/h,采取动态绿波算法进行信号配时后,以视频数据和跟车数据实测发现:实施双向动态绿波方案后,该主干路路段平均车速提升到约23km/h,比之前提升了23%,停车次数减少了24%,路口平均延误降低了12%,排队长度下降了7%。
数据在微观交通治理上的应用
微观交通治理是指在城市单个交叉口范围内发现交通问题,进而通过微观数据分析挖掘给出解决方案。本节主要针对交叉口评价与冲突现状,给出研究方法与研究成果。
1)数据来源与计算方法
交叉口服务水平可采用车均延误(s)、控制延误(s/veh)、饱和度(V/C)、排队长度(m)等指标判断,以上指标涉及信号相位相序与配时、车头时距、排队长度、小时交通流量(Vol/h)。视频检测器可提供排队长度、车流量、平均车速等指标,信号机提供信号相位、相序与配时信息,很容易计算交叉口服务水平。
交叉口冲突技术[4]用于定量研究各种道路交通安全问题及其对策的非事故统计评价方法,其核心指标为综合交通冲突率(R),与交叉口小时冲突数(T/h)、小时交通流量(Vol/h)直接相关。交叉口监控视频在后端进行结构化处理后可以得到机动车-机动车(简称机-机)、机动车-非机动车(简称机-非)、机动车-行人(简称机-人)的小时冲突数,同时能对违章事件进行统计;分类型的视频检测器可采集机动车、非机动车与行人的小时交通流量。
2)数据诊断及实施方案
S市主干路-主干路相交大型平面交叉口,东西向道路西进口道五进四出,东进口道六进四出,南北道路南北进口道均为三进两出,现场拍摄照片见图4-1,抽象为模型后见图4-2。视频监控拍摄,后端结构化处理得到某早高峰机动车、非机动车、行人流量如图4-3。

▲图4-1 交叉口现场拍摄图片

▲图4-2 交叉口CAD模型绘制
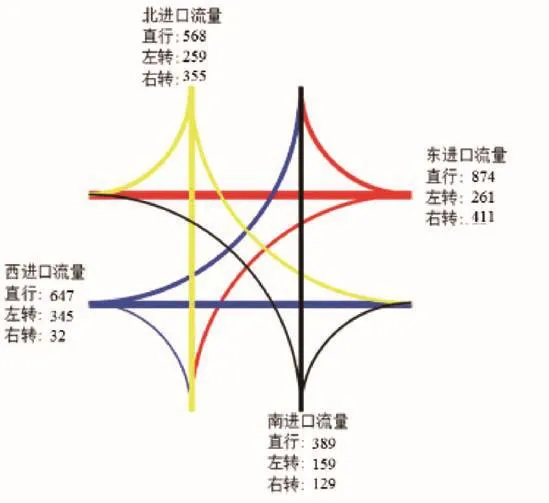
▲图4-3(a) 机动车流量
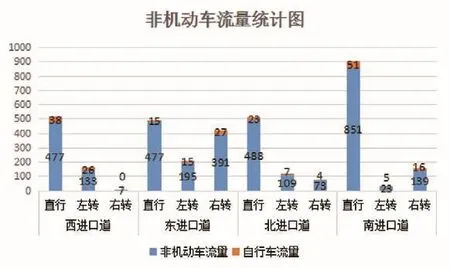
▲图4-3(b) 非机动车流量

▲图4-3(c) 行人流量
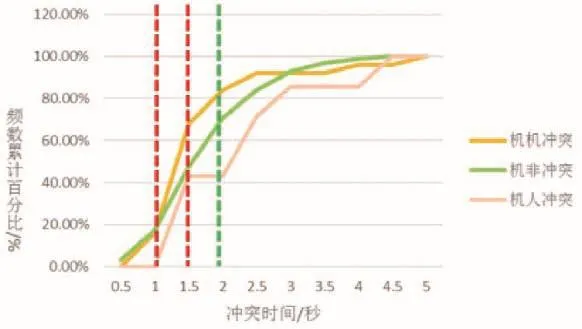
▲图4-4(a) 交叉口冲突时间频数累积百分比

▲图4-4(b) 交叉口冲突距离频数累积百分比
结合信号配时数据,以车均延误指标作为评价交叉口服务水平指标,通过sychro计算得到东进口方向延误为56.1s,西进口72.1s,南进口79.8s,北进口57.7s,平均延误63.9s,服务水平均为E。
同时,以视频结构化数据后得到该早高峰2h内交叉口的冲突数共计119个,其中机-机冲突25个,占比19%;机非冲突98个,占比76%;机人冲突7个,占比5%,绘制不同冲突时间的频数百分比及不同冲突距离的频数百分比见图4-4,绘制冲突位置统计图见图4-5,其中冲突时间小于1s认为是严重冲突,冲突距离小于3m认为是严重冲突,易发生交通事故。

▲图4-5 交叉口冲突位置统计图

▲图4-6 交叉口改善方案
可以发现,冲突时间来看,接近20%的机-机冲突和接近20%的机-非冲突属于严重冲突;冲突距离来看,超过20%的机-人冲突、接近20%的机-非冲突、略低于20%的机-机冲突属于严重冲突,交通冲突大部分集中于交叉口东北角,主要交通溯源地附近冲突汇聚。经计算得到该交叉口的综合冲突率,是不安全的交叉口,亟待改善。同时视频结构化后也可以统计得到早高峰期间,该交叉口非机动车逆行违法事件每信号周期均存在至少1起,加油站机动车逆行早高峰发生8起,非机动车闯红灯平均每2个信号周期就有1起,行人闯红灯与不走斑马线同样每信号周期至少1起。
提出以下交叉口改善方案:扩宽东进口的非机动车道;树立慢行优先标志牌,辅助电子警察抓拍;调整交叉口信号配时;增设非机动车违法抓拍设备;早高峰期间酒店、加油站出入口右进右出;见图4-6。
结束语
本文对于交通技术的发展进行了简单回顾与思考,通过获取到的交通数据,从宏、中、微观层面提出了一些应用技术与实践,希望在城市的交通治理过程当中发挥一定效果。数据在交通领域的应用应回归交通科学,同时着眼于业务,使交通技术的发展研究由以往的经验和定性化道路,借助不断丰富的精细化交通数据,走上科学与定量化道路,真正发挥数据在交通治理中的核心价值。
猜你喜欢
建材发展导向(2022年14期)2022-08-19
建材发展导向(2021年19期)2021-12-06
天津建设科技(2020年2期)2020-05-13
中国交通信息化(2019年9期)2019-11-16
东坡赤壁诗词(2019年5期)2019-11-14
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2019年12期)2019-08-13
东坡赤壁诗词(2019年3期)2019-07-05
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
