
“雪龙2”船体监测及辅助决策系统设计
2019-09-05 06:18赵炎平汪大立顾捷伟李中月
舰船科学技术 2019年8期
孙 慧,赵炎平,汪大立,顾捷伟,李中月
(1. 中国船舶工业集团有限公司第七〇八研究所,上海 200000;2. 中国极地研究中心,上海 200000)
0 引 言
“雪龙2”号船是我国第1 艘自主建造的极地科学考察破冰船,满足无限航区要求、具备全球航行能力。“雪龙2”设计航速12 ~15 kn,结构强度满足PC3 要求,可首、尾双向破冰,首向能在覆盖0.2 m 厚积雪的1.5 m 厚冰层上以2~3 kn 航速连续破冰。该船可实现极区原地360°自由转动,可突破极区20 m 当年冰冰脊,破冰能力良好。
船体结构强度是影响“雪龙2”破冰航行作业安全性的一个重要因素。为提高“雪龙2”抵御结构安全风险的能力,该船设计安装船体监测及辅助决策系统。该系统与船体全生命管理系统合并组成智能船体。近年来,国内外的船体监测系统发展迅速,许多国家的船体应力监测系统在破冰船上都有实际应用,韩国在ARAON 号破冰船和Arctic 号LNG 船的肋骨、船壳等部位安装应变片对结构应力与冰载荷进行了测量,美国在Varandey 极地运输船的首、尾肋骨上安装单向阵列式应变片对冰载荷进行了测量,加拿大在CCGS Louis S.St-Laurent 号破冰船和Terry Fox 号破冰船的肋骨上安装阵列式45°双片对剪应力进行了测量[1-5]。我国季顺迎等在“雪龙”号破冰船上多次安装传感器对船体结构响应及舱室声压进行了测试[6]。
本文对“雪龙2”号船上的船体监测及辅助决策系统进行介绍,具体包括系统组成、功能模块、业务流程、测点布置、数据分析方法、辅助决策方式以及系统部分功能界面等。
1 “雪龙2”船体监测及辅助决策系统概况
“雪龙2”号船上的船体监测与辅助决策系统通过在船体冰带区、重要结构和敏感部位中植入传感器,结合数据采集、数据预处理、屈服强度评估、疲劳强度评估、总纵强度评估、冰载荷反演、首部砰击计算、振动监测、数据库管理以及辅助决策等技术,形成具备船体结构健康自诊断功能的系统。该系统能够实时监测“雪龙2”号船上指定区域的结构状态,对危险应力进行报警,给船员提供及时有效的辅助决策信息,从而降低在恶劣海况下航行以及破冰作业时可能出现的结构安全风险。
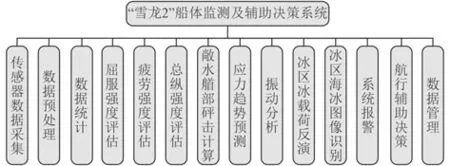
图 1 系统结构组成Fig. 1 System structure diagram
系统结构组成如图1 所示。其中,首部砰击压力计算模块只在敞水航行时开启,冰载荷反演及海冰图像识别模块只在冰区航行作业时开启。系统业务流程图如图2 所示。由图2 可知,系统采集数据的来源分为两部分:一部分来自系统自身安装的温度、应变与加速度传感器采集的测点应变与测点加速度信息,另一部分数据利用“雪龙2”号船上已有的设备采集相应数据,通过网络或串口形式传输至本系统,如气象、冰情、运动信息等。采集数据传输至上位机后进行数据预处理、强度评估、报警及辅助决策等工作,相关数据经筛选存入数据库中。
2 “雪龙2”船体监测及辅助决策系统设计
2.1 测点类型与设计

图 2 业务流程图Fig. 2 Flow chart
系统包含屈服评估、疲劳评估、总强度评估、冰载荷反演、振动计算、首部砰击计算等功能模块。系统根据“雪龙2”号船的航行作业特点和自身结构形式布置了一系列测点[7],部分测点示意图如图3 所示。
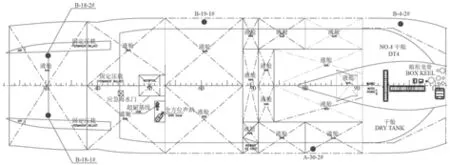
图 3 “雪龙2”测点位置示意图Fig. 3 Location map of “Xuelong 2” measuring points
具体测点布置情况介绍如下:
屈服测点60 个,疲劳测点5 个。每个屈服或疲劳测点含3 个光栅光纤应变传感器(构成直角应变花)与1 个光栅光纤温度传感器,布置形式如图4(a)所示。
总强度测点4 组,每组测点含3 个光栅光纤应变传感器(单向应变片平行布置)与1 个光栅光纤温度传感器,布置形式如图4(b)所示。
冰载荷测点88 个,布置方式为8×11 矩阵式,共包含85 个单向应力测点(每个测点含1 个光栅光纤应变传感器)与3 个复用的屈服测点,布置形式如图5所示,第43,45,47 号测点为复用的屈服测点。
振动测点3 个,首部砰击加速度测点1 个。每个测点含1 个三向加速度传感器。

图 4 布置形式Fig. 4 Strain gauge arrangement

图 5 “雪龙2”冰载荷测点示意图Fig. 5 Diagram of Xuelong 2 ice load measuring points
2.2 数据预处理与强度评估
数据预处理主要指对采集的数据进行滤波处理。传感器采集的应变与加速度信息既包含波浪或海冰引起的船体响应信号,也包含船用设备的高频机械振动、装载变化引起的低频响应等。根据采集信号的类型与频谱特征、采集工况(敞水区域或冰区)等设计合理的滤波器,进而进行强度评估[8]。本系统采用基于Kaiser 窗的FIR 数字滤波器,对屈服、疲劳、总强度及冰载荷测点数据,进行带通滤波,对加速度信号,进行高通滤波。滤波器的阻带衰减、截止频率等参数可以调节。
屈服及总纵强度评估分为实时评估与统计评估。实时评估根据实时监测的应变信息计算测点的合成应力,与阈值比较后进行分级报警工作。统计评估默认30 min 进行一次,系统对测点30 min 的合成应力序列进行滤波处理后,计算结构的失效概率,当失效概率高于一定范围后进行统计评估报警工作。
疲劳强度评估默认每5 min 进行一次。系统首先对疲劳测点的监测应力数据进行滤波处理,然后计算主应力与方向角,提取疲劳评估应力序列,再通过雨流计数法计算幅值、均值和循环次数,经平均应力修正后采用S-N 曲线法计算破坏循环次数,最后依据得到的循环次数和破坏循环次数计算结构的疲劳累积损伤并预报结构剩余寿命[9],评估结果以表单形式显示在系统界面中。
冰载荷计算采用反演方法[10]。首先建立冰载荷测点及附近区域的局部有限元模型,设置合理的边界约束条件,对单位面加载单元载荷,计算得到影响系数矩阵,然后根据冰载荷测点实测应变信息计算各单位面的冰载荷,并以云图形式显示。
砰击计算也采用反演方法。敞水航行时,根据首部砰击加速度测点数据识别砰击发生情况,记录发生砰击的时间及次数。砰击发生后,对采集的6 个首部应变测点数据进行高通滤波,结合影响系数矩阵反演出首部总的砰击压力。
振动分析基于振动加速度测点数据进行分析。对采集的振动加速度数据进行高通滤波,结合振动规范中的不同部位与结构对应的振动标准设置安全等级,评估振动强度,提供界面显示与声响报警功能。
2.3 航行作业辅助决策
敞水航行辅助决策依据报警信息及海况工况等信息提供航向与航速推荐建议。首先建立不同海况不同航速不同浪向角下的各危险剖面的剖面载荷百一值数据库,然后在实际航行中依据测得的波高、航速、浪向、应力报警位置及报警值信息,筛选出满足敞水航行结构安全的航速与航向角集合,找出与原航速与航向角最接近的组合作为辅助意见提供给用户。
冰区航行作业辅助决策依据报警信息给出航速和航向更改提示,用户根据冰情信息综合判断具体的更改操作。首先判断破冰船操作工况(冲撞操作、转弯操作、斜向操作、尾向操作、浅水区操作),然后根据结构应力监测结果与安全阈值的比值信息,选择相应的辅助决策方案。暂定当比值小于0.8,显示按计划正常航行,当比值大于0.8 并小于1 时,进行预警并提示注意航速与航向,当比值大于1 时,进行报警并提示建议降低航速/调整航向/停止操作。
3 “雪龙2”船体监测及辅助决策系统显示
“雪龙2”船体监测及辅助决策系统用户权限分为管理员与普通用户。普通用户主要针对大副及其他船员,普通用户的界面简洁、方便、容易操作,不能进行参数设置、数据导出、一键还原等功能。管理员用户主要针对系统的设计开发人员,拥有系统的所有权限,包括各类参数(船体结构材料参数、初始应力参数、滤波器参数、阈值参数等)的修改,数据导出,滤波前后曲线对比分析等权限。
图6 显示了普通用户的系统主界面,不同类型测点以不同的形状(圆形、正方形或菱形)表示。屈服强度、总纵强度测点的统计报警分为3 级,以红、黄、绿三色常亮显示进行区分,1 级红色报警时提供声响提示;实时报警以阈值为界限,超过阈值后进行红色闪烁及声响报警。振动报警以相应阈值为界限,正常状态以菱形透明显示,触发报警机制后红色闪亮并声响报警。传感器故障时,界面上的测点形状变为灰色叉状,同时提供声音警示。辅助决策意见显示在界面的中部上方。右侧以表格形式显示了疲劳测点的累计损伤与剩余寿命情况、屈服及总纵强度测点的统计评估结果及报警等级信息等。船舶航行至冰区时,用户可以切换为冰区航行及作业模式。
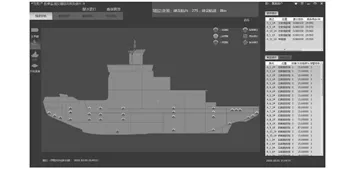
图 6 敞水航行系统主界面Fig. 6 Main interface of open water navigation
用户需要了解某测点详细信息时,点击主界面图中测点会出现如图7 所示的悬浮窗口,用户可以得到该测点的强度评估信息、绘制相应时历曲线图与峰谷值柱状图,也可以看到未来1 h 的应力趋势预测信息。
图8 显示了冰载荷评估应力云图,由8×11 个小方格组成,图右边为载荷大小的标尺。图9 为参数设置界面,仅管理员用户可以访问及修改,系统设计开发人员可在该界面对各类参数进行调试修改。图10 为数据库查询显示界面,用户可以查询历史评估数据、报警记录、系统操作数据等。
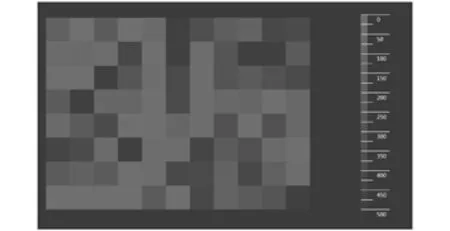
图 8 冰载荷显示界面Fig. 8 Display interface of ice load
4 结 语

图 9 参数设置界面Fig. 9 Interface of parameter settings

图 10 数据库查询显示Fig. 10 Display of database query
本文对“雪龙2”号船上设计安装的船体监测及辅助决策系统进行了详细介绍。系统可以利用实时监测的应变信息在线评估船体结构强度,同时可利用评估信息与外部环境信息等给出航行建议。在船舶后期营运过程中,系统可根据实际情况进一步完善。
猜你喜欢
船舶物资与市场(2022年8期)2022-11-26
现代园艺(2022年17期)2022-08-23
舰船科学技术(2022年11期)2022-07-15
廉政瞭望(2021年22期)2021-12-29
汽车实用技术(2021年10期)2021-06-04
舰船科学技术(2021年2期)2021-04-10
廉政瞭望(2021年11期)2021-03-25
百科知识(2020年3期)2020-02-24
北广人物(2019年46期)2019-12-30
——以徐州高层小区为例
建筑技艺(2019年9期)2019-11-27
