基于不同密度LiDAR数据DEM构建研究
2019-09-04 03:49尤号田
安徽农业科学 2019年9期
摘要 为了进一步提升数字高程模型构建效率,同时降低数据获取成本,以机载LiDAR数据为基础,通过对机载LiDAR数据进行处理得到地面点并对地面点进行抽取操作以获得不同密度地面点数据并插值生成DEM,最终获得不同抽取率下DEM数据生成的精度。结果表明,对于城区而言,随着点云密度的下降DEM生成精度RMSE从0.109 m逐渐增大到0.691 m;对于草地而言,RMSE则从0.065 m逐渐增大到1.096 m;对于林地而言,RMSE从0.088 m逐渐增大到2.201 m。对于3种地物类型而言,DEM生成精度均随抽取率的增大而逐渐降低,且不同地物类型RMSE的变化范围不同。
关键词 数字高程模型;激光雷达数据;地面点;抽取率;克里金插值算法
中图分类号 S127;TP79 文献标识码 A
文章编号 0517-6611(2019)09-0004-04
doi:10.3969/j.issn.0517-6611.2019.09.002
Abstract To further improve the efficiency of building DEM and reduce the cost of data acquisition, the airborne LiDAR data were used and processed in this paper. And the ground points were extracted and different density ground points data were obtained using exacting method. Then the DEMs were generated with kriging interpolation method. Finally, the accuracy of generated DEM under different extraction rates were obtained. It was showed that for urban area, the RMSE increased from 0.109 m to 0.691 m with the decrease of point cloud density. For grass area, the RMSE increased from 0.065 m to 1.096 m. For forest area, the RMSE increased from 0.088 m to 2.201 m. It was concluded that the accuracy of DEM generation decreased with the increase of extraction rate and range of RMSE varies with different terrain types.
Key words Digital elevation model;LiDAR data;Ground points;Extraction rate;Kriging interpolation algorithms
数字高程模型(digital elevation model,DEM)是一种重要的地形产品,能够有效描绘地形信息,是许多空间应用的基础数据[1-2]。传统DEM生成方法虽然精度较高,但多依赖野外人工测量,因而导致DEM生成成本较高且耗时费力[3]。随着科技的进步,DEM生成逐渐被现代空间信息观测技术所替代[4]。
机载激光探测与测量(light detection and ranging,LiDAR)系统是一种主动对地观测系统[5],集成了激光测距技术、全球定位技术、惯性导航技术等高新技术于一体,其作为一种新兴的空间信息观测获取技术,能够实时、高精度获取地物的三维空间信息[6],因而广泛用于地形测绘、资源调查、灾害监测等[7-9]方面,且已发展成为地形数据获取的有力手段。
机载LiDAR数据DEM生成精度不仅与所用插值算法有关,还与数据采样密度密切相关[10-12]。虽然增加数据密度能够在一定程度上提高DEM的生成精度[13],然而,随着数据密度的提高,数据的获取成本也会逐渐增加。因此,出于数据获取成本、时间效率以及数据存储文件大小等方面综合考虑,有必要根据研究区的地形特征有针对性地选用不同密度LiDAR点云数据,在保证DEM生成精度的前提下最大程度地节省数据获取成本和时间效率。
基于此,笔者以机载LiDAR数据为基础,首先对LiDAR数据进行处理得到地面点,之后对得到的地面點按不同比例进行抽取操作以得到不同密度地面点数据,然后采用克里金插值算法用于生成DEM,通过对比研究最终获得DEM生成最优点云密度,以期最大限度地提升数字高程模型构建效率,并降低数据获取成本。
1 材料与方法
1.1 激光雷达数据与处理
研究区位于吉林长春净月潭国家森林公园附近,主要由城区、草地、森林和水体等地物类型组成。2012年5月由搭载在飞机上的Leica ALS70激光雷达传感器进行激光雷达数据采集[14],飞行参数:
传感器Leica ALS70,
航高560 m,
波长1 064 nm,
扫描角±20°,
扫描频率40.3 Hz,
光斑直径0.28 m,
密度10点/m2。
首先,利用Terrascan软件对原始激光雷达数据进行滤波处理,之后利用不规则三角网算法对预处理后的激光雷达数据进行分类处理,得到地面点和非地面点,接着利用抽取算法对地面点按1、1/10、1/50、1/100、1/500和1/1 000倍进行抽取操作,之后利用克里金插值算法对抽取前后的地面点进行插值操作以生成不同点云密度下的DEM数据,并将原始数据生成的DEM作为参照DEM。
1.2 克里金插值算法
克里金插值是一种利用变差函数的地质统计学插值方法,它依赖于数据的空间分布而不是实际值。利用数据驱动加权函数生成克里金权重以减少对输入值的偏倚,且当有良好的变差函数模型可用时,克里金插值能够提供最佳的插值。克里金插值是一种局部确定性插值技术,以定义邻域中采样点的距离加权平均来计算该值[15]。它认为靠近查询位置的点具有更大的影响力,且利用样本点距所需点的距离的倒数对样本点进行加权。
1.3 精度评价
2 结果与分析
2.1 LiDAR数据不同抽取率
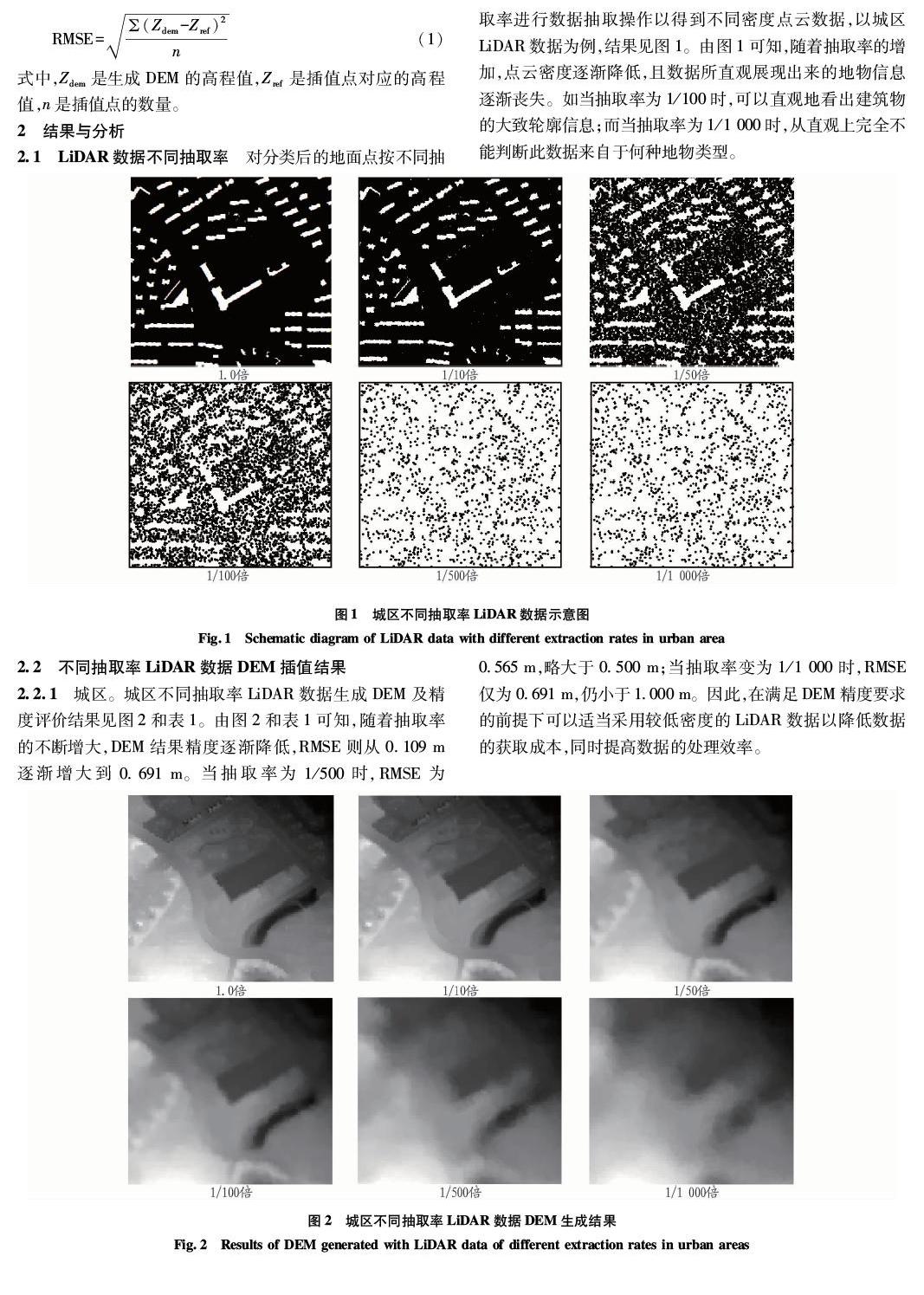
对分类后的地面点按不同抽取率进行数据抽取操作以得到不同密度点云数据,以城区LiDAR数据为例,结果见图1。由图1可知,随着抽取率的增加,点云密度逐渐降低,且数据所直观展现出来的地物信息逐渐丧失。如当抽取率为1/100时,可以直观地看出建筑物的大致轮廓信息;而当抽取率为1/1 000时,从直观上完全不能判断此数据来自于何种地物类型。
2.2 不同抽取率LiDAR数据DEM插值结果
2.2.1 城区。
城区不同抽取率LiDAR数据生成DEM及精度评价结果见图2和表1。由图2和表1可知,随着抽取率的不断增大,DEM结果精度逐渐降低,RMSE则从0.109 m逐渐增大到0.691 m。当抽取率为1/500时,RMSE为0.565 m,略大于0.500 m;当抽取率变为1/1 000时,RMSE仅为0.691 m,仍小于1.000 m。因此,在满足DEM精度要求的前提下可以适当采用较低密度的LiDAR数据以降低数据的获取成本,同时提高数据的处理效率。
2.2.2 草地。
与上述城区所示结果类似,草地不同抽取率LiDAR数据生成DEM也随着抽取率的不断增大,DEM结果精度逐渐降低,RMSE则从0.065 m逐渐增大到1.096 m,结果见图3和表2。
由表2可知,当抽取率为1/500时,RMSE为0.686 m;当抽取率为1/1 000时,RMSE为1.096 m,大于1.000 m。与城区相比,当数据抽取率小于1/100时,草地RMSE小于城区RMSE,当数据抽取率大于1/500时,草地RMSE逐渐大于城区RMSE,说明草地DEM精度受点云密度的影响较城区大。
2.2.3 林地。
林地不同抽取率LiDAR数据生成DEM及精度评价结果见图4和表3。由图4和表3可知,DEM插值精度随抽取率的增大而逐渐降低,RMSE从0.088 m逐渐增大到2.201 m。当抽取率为1/50时,RMSE为0.835 m;当抽取率为1/100时,RMSE为0.960 m,接近1000 m;当抽取率增加到1/1 000时,RMSE则增大到2.201 m。
与城区和草地相比,林地DEM精度随抽取率的变化更显著,且抽取率为1/10~1/50,林地RMSE驟增,RMSE从0088 m增加到0.835 m,远大于城区和草地同抽取率下RMSE值的变化,且在每一种抽取率下林地点云插值DEM的RMSE值均高于城区和草地的RMSE值。
通过对城区、草地和林地3种不同地物类型不同抽取率LiDAR数据DEM生成结果分析可知,3种地物类型DEM生成精度均随抽取率的增大而逐渐降低,所不同的是地物类型不同RMSE的变化范围不同。对城区而言,RMSE从0.109 m逐渐增大到0.691 m;对草地而言,RMSE则从0.065 m逐渐增大到1.096 m;对林地而言,RMSE从0.088 m逐渐增大到2.201 m。
3 结论
为了降低数据获取成本、提高数据处理效率,该研究选取城区、草地和林地3种不同地物类型,以机载LiDAR数据为基础,通过对地面点进行抽取操作以获得不同密度地面点数据并插值生成DEM,最终获得不同抽取率下DEM数据生成的精度。
结果表明,DEM生成精度均随抽取率的增大而逐渐降低。对城区而言,RMSE从0.109 m逐渐增大到0.691 m;对草地而言,RMSE从0.065 m逐渐增大到1.096 m;对林地而言,RMSE从0.088 m逐渐增大到2.201 m。
不同地物类型生成相同精度的DEM所需点云密度不同。如当要求DEM生成精度小于0.500 m时,对于城区而言,数据密度可以选择约为0.033点/m2,对于草地而言,则可以选择约为0.100点/m2,对于林地而言,则可以选择约为1.000点/m2。
综上所述,DEM生成精度与机载LiDAR数据密度密切相关,随着密度的降低DEM精度逐渐下降,且不同地物类型DEM精度下降幅度不同,但该研究所选研究区地形结构及地物类型相对简单,所得结论在其他复杂地形条件下的适用性有待进一步验证,因而在未来研究中应尽量选取地形结构及地物类型相对复杂的区域以增加结论的适用性。
参考文献
[1] MINAR J,EVANS I S.Elementary forms for land surface segmentation:The theoretical basis of terrain analysis and geomorphological mapping[J].Geomorphology,2008,95(3/4):236-259.
[2] WILSON J P.Digital terrain modeling[J].Geomorphology,2012,137(1):107-121.
[3] VAN NIEKERK A.A comparison of land unit delineation techniques for land evaluation in the Western Cape,South Africa[J].Land use policy,2010,27(3):937-945.
[4] 杜敏,李明会,颜萍,等.全数字摄影测量DEM在生产中的质量控制[J].测绘与空间地理信息,2009,32(4):222-224.
[5] 尤号田,邢艳秋,王萌,等.小光斑激光雷达数据估测森林生物量研究进展[J].森林工程,2014,30(3):39-42.
[6] HODGSON M,BRESNAHAN P.Accuracy of airborne LIDARderived elevation:Empirical assessment and error budget[J].Photogrammetric engineering and remote sensing,2004,70(3):331-339.
[7] 刘征.基于激光雷达地形测绘建立DEM模型[J].遥感技术与应用,2002,17(5):264-268.
[8] 赵峰,李增元,王韵晟,等.机载激光雷达(LiDAR)数据在森林资源调查中的应用综述[J].遥感信息,2008(1):106-110.
[9] 冯光胜.LIDAR在地质灾害调查与监测中的应用研究[J].铁道工程学报,2014,31(7):12-16.
[10] GONG J Y,LI Z L,ZHU Q,et al.Effects of various factors on the accuracy of DEMs:An intensive experimental investigation [J].Photogrammetric engineering & remote sensing,2000,66(9):1113-1117.
[11] 靳克強,龚志辉,王勃,等.机载激光雷达数据提取DEM的关键技术分析[J].测绘工程,2010,19(6):39-42.
[12] POLAT N,UYSAL M,TOPRAK A S.An investigation of DEM generation process based on LiDAR data filtering,decimation,and interpolation methods for an urban area[J].Measurement,2015,75:50-56.
[13] MACEACHREN A M,DAVIDSON J V.Sampling and isometric mapping of continuous geographic surfaces[J].The American cartographer,1987,14(4):299-320.
[14] 尤号田,邢艳秋,王铮,等.点云密度对激光雷达估计森林样方平均树高的影响[J].东北林业大学学报,2014,42(5):143-148.
[15] BURROUGH P A,MCDONELL R A.Principles of geographical information systems[M].New York:Oxford University Press,1998.
猜你喜欢
北京测绘(2022年5期)2022-11-22
幼儿画刊(2022年8期)2022-10-18
汽车观察(2021年8期)2021-09-01
河北果树(2020年2期)2020-05-25
中国交通信息化(2019年1期)2019-03-26
西南石油大学学报(自然科学版)(2019年1期)2019-01-28
电子制作(2018年16期)2018-09-26
中国卫生(2016年11期)2016-11-12
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年14期)2016-04-11