城市轨道交通列车空滑检测的融合算法研究
2019-08-29 01:26顾蔡君
铁路通信信号工程技术 2019年7期
顾蔡君
(中国铁路通信信号上海工程局集团有限公司,上海 200436)
1 概述
列车自动控制系统(ATC)是城市轨道交通的重要组成部分,是保证城市轨道交通安全和高效的关键系统。然而,目前国内城市轨道交通线路的ATC系统还主要依靠国外引进,其建设成本和维护费用非常高,因此在城市轨道交通发展中,实现ATC 系统的国产化成为一项重要任务。车载控制器(VOBC)是ATC 系统的核心安全子系统之一,控制列车安全可靠地运行。它检测传感器的数据,以此获得列车当前的运行速度、运行距离以及在线路上某些点的绝对位置,从而定位列车和实时计算列车当前位置的限速,并实施超速防护,保证列车安全运行[1]。而这一切的基础都离不开测速测距系统,测速测距系统需达到VOBC 规定的精度。
测速测距系统作为VOBC 的重要组成部分,需实时地为VOBC 提供列车的运行速度、距离、运行方向、空转打滑等信息,其高可靠性、高安全性,是实现VOBC 功能和性能的基础。目前,测速测距系统的首选设备是光电式速度传感器(OPG),其通过记录车轮的转动情况,可以准确地计算列车的运行速度和走行距离。这种测速测距方式的缺点是一旦列车出现空转或滑行,车轮的转速无法正确反映列车的实际运行速度,测速测距会出现较大的误差,从而导致VOBC 的功能故障[2-3]。
传统的空转打滑检测方法在实际使用中都是基于OPG 自身测量数据进行的,通过比较不同测速周期的速度传感器测量值完成空转打滑的检测,这种方法并不足以完全区分列车正常运行时牵引或制动引起的加速度改变和空转打滑造成的加速度改变[4-5]。多普勒雷达通过多普勒频移效应,直接测量列车相对于雷达波反射面的速度,可以避免车轮滑行、空转和由于磨损导致轮径改变而引起的误差[6]。本文针对这一情况,在现有的基于OPG 的列车测速测距方法中引入雷达速度传感器(RD),对空转打滑原理进行分析,提出一种以光电式速度传感器和雷达速度传感器相结合的测速测距算法用以对列车是否发生空转或打滑进行检测和补偿,及时修正空转或打滑造成的测速测距误差,为VOBC 提供更加可靠、精确的列车速度和位置信息。
2 空转打滑检测及校正算法实现
2.1 空转打滑与车轮特性
列车运行时不同类型的车轮在空转打滑时有着不同的表现,如表1 所示。
在安装OPG 时,尽量安装在第3 类轮上,避免空转打滑对OPG 测速的影响。如必须安装在1 类或2 类车轮上,需要对采集到的OPG 速度进行空转打滑检测以及校正。
2.2 空转打滑检测及校正模型
根据列车行驶的实际情况,列车空转的发生条件一般有如下两种情况[7]:
1)列车在牵引加速阶段,由于牵引力的增加,导致牵引力大于轮轨黏着力而引起空转;
2)列车在上坡时,列车行驶的速度有所降低,而牵引力加大,当遇到诸如降雨、降雪等会使黏着系数减小的因素时,列车车轮仍然可能会在钢轨上发生空转。
根据列车行驶的实际情况,打滑发生在列车制动阶段,此时制动力大于轮轨黏着力[8]。
本文提出的空转打滑检测算法主要是根据轨道的物理属性和列车的牵引制动力特性,将当前OPG传感器的加速度与当前速度下的最大加速度/减速度进行比较。
假设某一时刻OPG 的速度增量为:ΔVOPG(n)=VOPG(n)-VOPG(n-1),车载测速测距系统根据预先配置的不同速度档下的最大加速度/减速度,计算当前速度下的牵引最大速度增量为ΔVacc,制动最大速度增量为ΔVb。当满足ΔVOPG(n)<ΔVb: 或者ΔVOPG(n)>ΔVacc时,即可判定n 时刻为空转滑行的开始点,并将该OPG“空滑状态”置位。
此时可使用另一路OPG 和/或雷达数据,当空转滑行过程结束的时候,OPG 速度会重新趋近于列车的真实速度。设定一个阈值ΔVthr,当OPG 速度VOPG(n)与雷达速度VRD(n)满足:│VOPG-VRD(n)│<ΔVthr时,即可判定空转滑行过程结束,并将该OPG“空滑状态”复位。
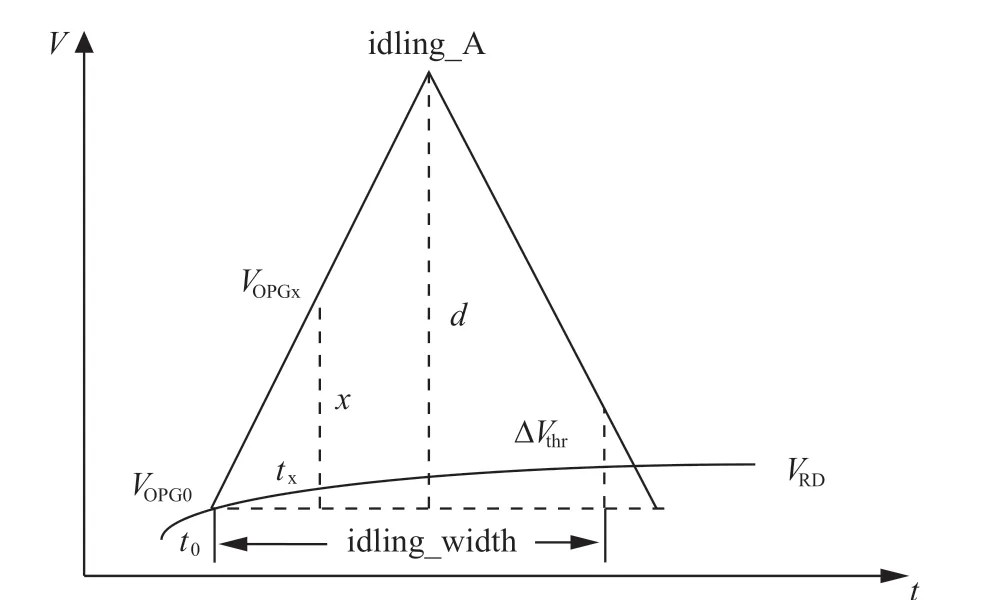
图1 空转判定过程Fig.1 Idling decision process
空转滑行判定算法在空转情况下的实现过程如图1 所示,当在t0时刻检测到ΔVOPG(t0)>ΔVacc时,即判定t0为空转的开始时刻,从此时开始到判定空转结束,列车速度取自传感器融合速度。VRD(tx)为tx时刻所对应的雷达传感器的速度值,VOPG(tx)为tx时刻所对应的速度传感器的速度值,当满足│VOPG(tx)-VRD(tx)│<ΔVthr时,即判定tx为空转结束时刻。从此刻开始,列车速度取OPG 速度。
空转滑行判定算法在滑行情况下的实现过程如图2 所示,当在t0时刻检测到ΔVOPG(n)<ΔVb时,即判定t0为滑行的开始时刻,从此时开始到判定滑行结束,列车速度取传感器融合速度。VRD(tx)为tx时刻所对应的雷达传感器的速度值,VOPG(tx)为tx时刻所对应的速度传感器的速度值,当满足│VOPG(tx)-VRD(tx)│<ΔVthr时,即判定tx为滑行结束时刻。
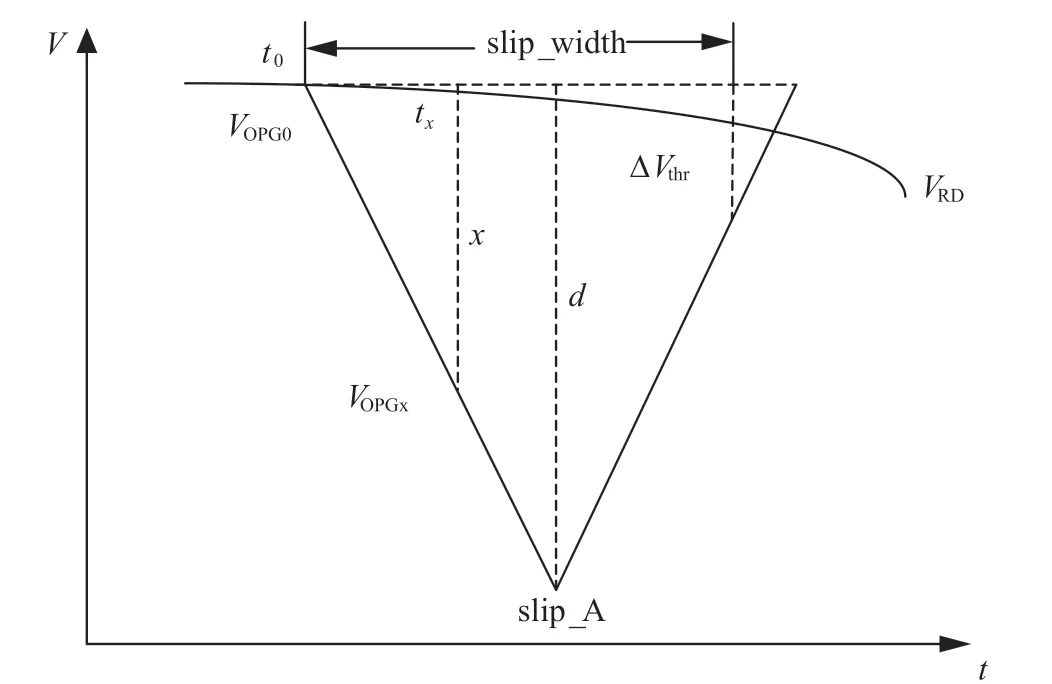
图2 打滑判定过程Fig.2 Skidding decision process
当雷达状态异常时,结合考虑车辆的牵引制动性能和坡度带来的附加阻力因素计算出最大牵引速度增量ΔVacc'=ΔVacc+apΔt 和最大制动速度增量ΔVb'=ΔVb-apΔt (其中ap为坡道阻力加速度,重力加速度9.9 m/s2,3.5%的坡道:0.35 cm/s2)。当满足:ΔVOPG(n)≥ΔVb'或者ΔVOPG(n)≤ΔVacc'时,即可判定n 时刻为空转打滑的结束点。
3 测速测距融合算法设计
城市轨道交通车载测速测距主要分为两部分,一部分为空转打滑的检测校正,另一部分是多组传感器数据的融合。车载测速测距系统在完成空转打滑检测和校正功能实施后,需对传感器测速测距数据进行融合处理,以得到更加可靠、精确的列车速度和位置信息。
本文提出的算法采用两路速度传感器OPG1,OPG2和一路雷达传感器RD,下面说明两路速度传感器采集到的速度距离与雷达传感器采集到的速度距离如何进行融合计算。
3.1 列车测速融合计算
车载测速测距系统测速功能的数据来源有:
1)对雷达报文进行解析,计算出雷达传感器测出的速度数据VRD;
2)对两路OPG 的脉冲信号,采用T 法和M 法计算出两组OPG 速度数据VOPG1和VOPG2;
3)以及OPG 空转打滑检测的结果。
测速功能将对这3 组传感器的速度数据进行融合,以满足系统对测速精度的要求。速度融合的原则是:
1)以OPG 测速为主,雷达测速为辅(空滑校正),至少需要有两路传感器正常;
2)当速度小于等于5 km/h 时,雷达测速误差较大(>8%),仅使用OPG 测速,根据动力学特性进行空转打滑校正和测速;当速度大于5 km/h 且雷达可用时,雷达用于OPG 空滑判断和速度融合;
3)当传感器发生故障或空转打滑时,对测速功能的影响及融合方案如表2 所示(1:正常,0:故障)。
3.2 列车测距融合计算
车载测速测距系统测距功能的数据来源如下。
1)对两路OPG 的脉冲信号处理
计算本周期下OPG1,OPG2的脉冲总数,并与前一周期OPG1,OPG2的脉冲总数作差,得到当前周期OPG1,OPG2的脉冲增量。
将本周期OPG1的脉冲增量与OPG2的脉冲增量作比较,若本周期OPG1与OPG2的脉冲增量差小于阈值(默认为2,可配置),则取本周期OPG1与OPG2的脉冲增量的平均值作为本周期OPG 的脉冲增量,否则取本周期脉冲增量的较大值为本周期OPG的脉冲增量。

表2 传感器各状态下的测速功能及融合方案Tab.2 Speed measurement function and fusion scheme of sensor in various states
将本周期OPG 的脉冲增量与前一周期OPG 的脉冲增量作比较,若本周期OPG 的脉冲增量与前一周期OPG 的脉冲增量差小于阈值(默认为5,可配置),则以本周期OPG 的脉冲增量作为本周期OPG的测距增量,否则取前一周期OPG 的脉冲增量做平滑处理(默认加5,可配置),以平滑处理后的值,作为当前周期下OPG 的测距增量。
2)对雷达报文处理
基于本周期雷达报文中的雷达速度计算的距离与前一周期基于雷达速度的距离输出作差,得到本周期基于雷达速度的距离增量。
基于本周期雷达报文中的雷达距离与前一周期的雷达距离作差,得到本周期雷达距离增量。
判断本周期雷达状态:若雷达状态良好,则以本周期基于雷达速度的距离增量和雷达距离增量两者中的较大值作为本周期雷达的测距增量;反之,则将本周期雷达的测距增量与前一周期雷达的测距增量作比较,若本周期雷达的测距增量与前一周期雷达的测距增量差小于阈值(默认为13 cm,可配置),以本周期雷达的测距增量作为本周期雷达的测距增量,大于等于阈值,则将前一周期雷达的测距增量做平滑处理(默认加13 cm,可配置),作为本周期雷达的测距增量。
车载测速测距系统对这两组测距增量数据进行融合,可以抵消掉空转滑行对测距功能的影响,距离融合的原则是:取测距增量大的为本周期测距融合增量。
在前一周期测距融合增量的基础上,累加本周期的测距融合增量得到本周期测距融合输出。
3.3 算法验证
下面通过实验验证本文提出的空转打滑检测及校正算法。
如图3 所示,在列车制动阶段的某些时刻,OPG1与OPG2采集到的速度表现出很大的减速度,然而实际列车运行时是无法达到如此大的减速度的,很明显出现了打滑的情况,此时就需要进行空转打滑补偿。通过观察空转打滑补偿后的速度信息可以看出,通过OPG 速度与雷达速度以及OPG 速度增量的信息融合,补偿后的速度既不像雷达速度那样体现出明显的白噪声特性,也在一定程度上修正了OPG 速度的空转打滑,在非空转非打滑的情况下减少了误判。
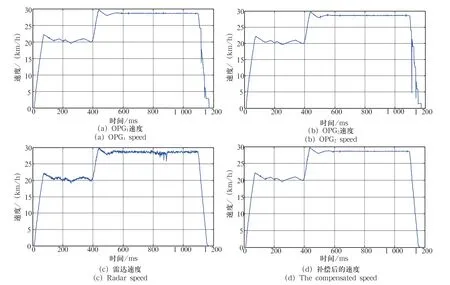
图3 空转打滑判定及补偿效果Fig.3 Idling and skidding decision and compensation results
该算法仿真需要配置的参数如表3 所示。
4 结束语

表3 算法仿真配置参数Tab.3 Configuration parameters of algorithm simulation
本文提出了一种采用光电式速度传感器和雷达速度传感器相冗余的列车测速测距融合算法。根据雷达速度传感器测量列车速度不受列车空转打滑影响的特点,将其用于检测列车是否发生空转打滑,且在列车发生空转打滑时对其速度进行校正。本文设计的列车测速测距融合算法在实验室环境下进行了仿真验证,可以有效减少空转打滑工况下的测速测距误差,具有实际工程意义。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
北京航空航天大学学报(2022年5期)2022-06-06
当代陕西(2022年6期)2022-04-19
当代水产(2021年8期)2021-11-04
有色设备(2021年4期)2021-03-16
科学(2020年3期)2020-01-06
中学生数理化·中考版(2019年9期)2019-11-25
电子制作(2017年7期)2017-06-05
北京航空航天大学学报(2017年10期)2017-04-20
弹箭与制导学报(2015年1期)2015-03-11