基于曼哈顿距离加权协同表示分类的车辆识别
2019-08-29 08:03
计算机测量与控制 2019年8期
(上海大学 通信与信息工程学院,上海 200444)
0 引言
实现车辆类型的自动识别可以在现实中带来很多的益处,比如军事攻防、智慧城市等方面。对于车型识别的研究,很多都是基于图像处理所进行的[1-2],但是基于图像的车辆识别可能受到遮挡、光照、隐蔽性不足等等影响,因此本文的研究主要是通过声频来进行车辆目标类型的分类识别。
在模式识别中,分类算法起到了至关重要的作用。稀疏表示分类(SRC)[3]在人脸识别领域的应用取得了很大的成功,基于SRC发展的算法在很多模式识别领域展开了广泛的研究:Wen[4]等提出了一种基于新型字典的SRC方法用于人脸识别;张[5]等结合了多特征融合和SRC用于农业害虫识别;在声频车辆目标识别领域,Wang[6]等采用SRC得到了不错的分类识别结果等等。但是,SRC类型的算法可能在识别过程中比较耗时,Zhang[7-8]等在研究中发现,在实际的人脸识别问题中,协同表示在稀疏表示分类算法中发挥了更大的作用,因此提出了协同表示分类(CRC)算法,相比于SRC,明显地提高了人脸识别速度。同时,CRC算法框架还改进了传统框架中重构残差的计算公式,可一定程度提升分类精度。由于CRC的高效性,众多围绕着CRC的模式识别研究相继展开:Yang[9]等提出了核版本的协同表示分类方法用于图像分类;李[10]等提出了使用CRC来进行步态的识别;王[11]等采用声频和振动信号多任务联合的CRC来进行车辆识别等等。
在SRC的研究中,Lu[12]等发现将每一个训练样本和测试信号的相似性考虑进分类算法中将提升SRC的识别精度,因此提出了加权稀疏表示分类(WSRC)方法并在人脸识别中取得了较好的效果。保局性[13-14]对于分类器具有十分重要的意义,类似的,将保局性考虑进CRC的加权类型的协同表示分类算法被广泛的提出用于图像领域的模式识别研究中[15-17]。
在采用声频进行车辆类型识别的领域,罗[18]等基于Lu[12]等的思想,提出了基于WSRC的车辆识别,证明了在声频车辆类型识别中,其基于保局性的加权编码方式仍然可以对分类识别精度的提升起到很好的作用。由于保局性在声频车辆识别中的良好表现和CRC理论所展现出的高效性,本文在声频车辆目标识别中,将加权编码引入到CRC方法框架中,提出了在声频无线传感器网络下基于加权协同表示分类(WCRC)的车辆识别,用以提高车辆识别速度和精度。同时对于使用欧氏距离进行加权编码[18]造成的样本相似性判断不足,本文将曼哈顿距离引入加权编码中以提升识别精度,进一步提出了基于曼哈顿距离加权协同表示分类(本文称之为Manhattan-WCRC)的声频车辆目标识别。通过实验,本文将在同等条件下通过和WSRC、CRC、SRC作对比,来验证Manhattan-WCRC、WCRC在采用声频特征信号进行车辆目标类型识别中的可行性和优势。
1 声频车辆目标识别框架
通过声波来识别车辆目标类型是可行的,但是车辆在行驶过程中产生的原始信号包含了大量的噪声,所以在分类识别前需要进行很多步骤的处理,本文总结了声频传感器网络下的车辆目标识别框架。
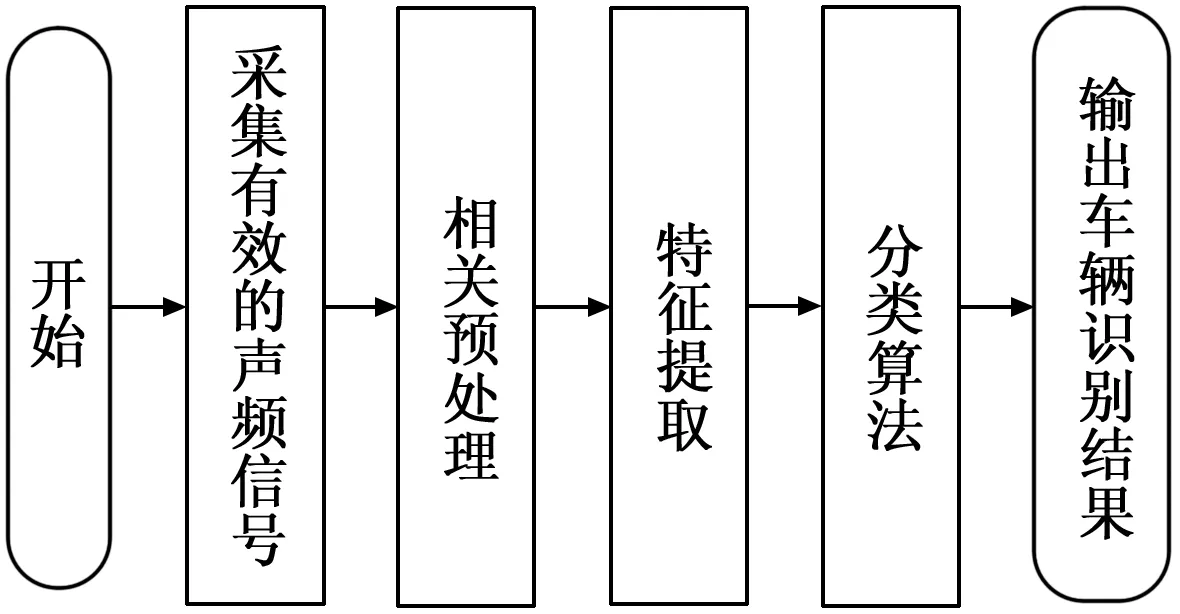
图1 声频车辆目标识别模型
如图1模型所示,具体分类识别过程由以下几步组成:
1)需要采集到车辆行驶过程中产生的有效声波信号。可以通过在需要检测的车辆目标的行驶道路上搭建基于声频的无线传感器网络进行声频信号的采集,再采用恒虚警率(CFAR)[19]算法,获得原始声频数据中真正的有效信号。
2)对采集到的经过CFAR算法检测的有效信号,进行相关方面的预处理(主要包括预加重、分帧和加窗、以及端点检测)。
3)对于已经预处理好后的声频车辆目标信号使用MFCC[6](梅尔频率倒谱系数)进行声频信号的特征提取。其中,MFCC算法是在声音识别领域中最常见且行之有效的特征提取算法。
4)将特征提取后的信号输入到分类算法(包括训练集和待测信号),从而预测待测信号的所属类别,以实现车辆类型识别的目的。由于分类算法在声频车辆目标识别中占有非常重要的地位,本文主要研究了分类算法在车辆识别中的性能。
2 稀疏和协同表示分类
2.1 稀疏表示分类
稀疏表示分类实质上是通过将所有训练信号构成字典,然后通过字典来对测试信号进行稀疏表示得到测试信号的系数向量(字典对测试信号进行稀疏表示后的向量),再将每个类的系数向量和每个类的字典进行重构与原测试信号求残差,残差最小那一类便是测试信号所归属的那一类。
声频车辆目标识别中的稀疏表示分类(SRC)方法框架总结如下:
1)输入包含了L个类别的训练集字典D(其中:信号特征维度为M,信号的个数为N,构成了一个M×N矩阵):
D=[D1,…,Di,…,DL]∈RM×Ni=1,2,…,L
(1)
其中:每一类训练样本Di包含n个同类别的测试样本:
(2)
接下来输入一个要判断类别的测试样本x∈RM,和正则化参数λ。(下文中测试样本x和训练字典D都以此为准,不再做详细描述。)

(3)
在适当的ε(ε为信号的噪声水平)和λ参数条件下,等价于以下的式子:
(4)
3)各类重构残差计算:
(5)
4)输出识别结果:
(6)
2.2 协同表示分类
Zhang[7-8]等指出在人脸识别中通常都是小样本的问题,其每一类的字典都是欠完备的,通过每一类的欠完备字典单独来表示测试样本是不稳定的。可以通过两种方式来解决这个问题:1)将每一类训练字典都引入足够多的样本来构成超完备字典,但是这在上述实际问题中已经难以实现。2)在SRC中,实际上可以在一定1-范数稀疏约束下,通过所有类一起来协同表示测试样本。
其中Zhang[7-8]等分析指出,在SRC中对于提高分类识别率起主要作用的是协同表示,而不是1正则化项:
(7)
但是,当样本数变大时,式(7)将会变的不稳定,因此SRC中通过施加1-范数稀疏约束来得到稳定的解,但是求解1-范数最小化问题会比较耗时,可以采用2-范数来正则化系数向量的解(使得解稳定,同时注入一定的稀疏性),从而大幅度降低运算时间,同时得到相对接近的识别结果。在CRC中,给出基于正则化最小二乘法的系数向量解法:
(8)
其中式(6)可以改写为:

(9)
其中:
P=(DTD+λ·I)-1DT
(10)
这里I为单位矩阵,矩阵P可以通过已知的训练字典提前计算好,加之矩阵计算的速度是非常快的,因此CRC的识别速度得到了明显的提高。
(11)
声频车辆目标识别中的协同表示分类(CRC)方法框架总结如下:
1)输入训练字典D、正则化参数λ。
2)提前计算矩阵P:
P=(DTD+λ·I)-1DT


4)各类重构残差计算:
5)输出识别结果:
3 加权协同表示分类
3.1 加权编码方法
SRC在全局的表示过程中,忽略了输入信号局部的分布结构,而局部保持特性(以下称之为保局性)[13]在分类器里却起到了比较有益的作用[14]。为了弥补SRC对于保局性的重视程度不足,Lu[12]等在人脸识别领域提出了加权稀疏表示分类(WSRC)算法,并且在精度上有不错的提高。以上主要是针对图像领域的工作,罗[18]等提出将WSRC引入了声频车辆目标识别领域,通过测试信号和每一个训练样本之间的相似度(基于欧氏距离)将稀疏表示后的系数向量添加不同的权值来提升识别效果。基于以上所做的工作,本文将声频无线传感器网络下车辆识别中的WSRC的加权编码方法总结如下:

2)计算权值W。W为对角矩阵,其对角元素为:
(12)
其中:
(13)

3)分配权重,得到加权后的系数向量:
(14)
加权后的系数向量中,测试信号所归属类的系数向量部分和该类字典的重构率会更好,相反的,和测试信号相似度更小(距离值更大)类部分对应的系数向量和该类字典的重构率会越差(即残差会越大),从而拉开了两者重构率之间的差距,以达到提高识别率的目的。为方便对比,本文给出声频车辆目标识别中的WSRC方法框架总结如下:
1)输入测试信号x、训练字典D、正则化参数λ。

4)各类重构残差计算:
(15)
5)输出识别结果:
3.2 加权协同表示分类
1)输入训练字典D、正则化参数λ。
2)提前计算矩阵P:
P=(DTD+λ·I)-1DT


5)各类重构残差计算:
(16)
6)输出识别结果:
4 曼哈顿距离加权协同表示分类
曼哈顿距离(Manhattan distance)又称作城市街区距离(City Block distance),以二维空间为例,如图2可以看到,在拥有众多街区的纽约曼哈顿,从A点到B点最短的距离为欧氏距离,但是实际的情况(因为街区房子的阻隔,不能直接由A到B抵达终点)可能需要经过1或2路线的距离长度(其中路线1和路线2的长度是等价的)。其中路线1或2所代表的距离长度可能比路线3带有更多的实际信息。受此启发,类比到声频车辆目标识别领域,在加权编码中引入曼哈顿距离来取代欧氏距离,从而提高测试信号和训练信号之间相似度的判断能力,以提高加权协同表示分类方法的识别率。
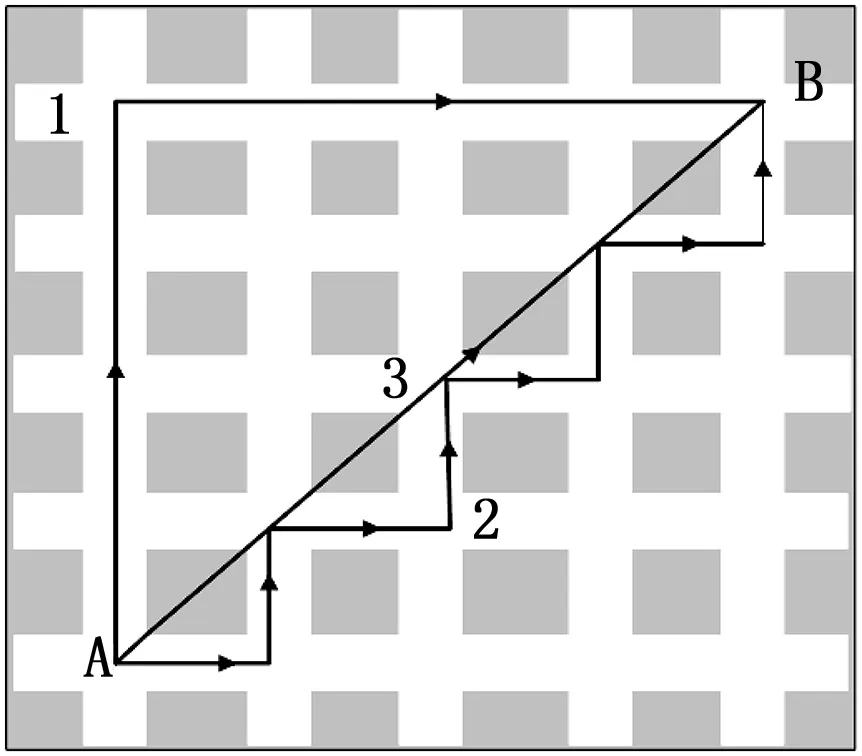
图2 曼哈顿距离平面示意图

原加权编码方法中基于欧氏距离进行编码:
(17)
接下来给出采用基于曼哈顿距离的加权编码:
(|a1-b1|+…+|ah-bh|+…|aM-bM|)S
(18)
其中,欧式距离(‖.‖2)对应的为2-范数,曼哈顿距离(‖.‖1)对应的为1-范数。
由式(17)、(18)可以看出,当声频测试和训练特征信号之间的距离向量中存在一些较大的分量时,使用欧氏距离计算距离时,将会忽视掉一些较小值,但是这较小的分量仍然保持了一些相似性的判断信息。使用曼哈顿距离计算车辆声频特征信号的距离时,会使得这些较小分量仍然可以一定程度地贡献本身所包含的相似信息,从而提升加权效果。
基于以上分析,本文提出了声频传感器网络下基于曼哈顿距离加权协同表示分类(Manhattan-WCRC)的车辆识别方法。下面给出本节所提方法框架的总结如下:
1)输入训练字典D、正则化参数λ。
2)提前计算矩阵P:
P=(DTD+λ·I)-1DT
4)将表3中加权编码方法的式(13)更新为采用曼哈顿距离加权编码的式(18)。

6)各类重构残差计算:
7)输出识别结果:
5 实验结果
5.1 实验设置
为了验证以上理论,本文进行了采用声频特征信号进行车辆目标类型识别的Matlab仿真实验,主要研究了不同分类算法的识别性能。本实验数据集和文献[18]一样,主要包括两种军事车辆类型:重型轮式卡车(DW)和履带车(AAV)。总共为180个经过声频车辆目标识别框架处理(特征提取后,分类算法前)后的数据。
在分类识别实验设置中,AAV总共包括90个特征信号样本,DW也包括90个特征信号样本。实验中,将每一个AAV数据和DW数据分别设为标签0和1。随机取每一类的n个样本来作为训练集,剩下的每一类的90-n个样本来作为测试集。这里,训练集总大小为2n,测试集总大小为2*(90-n)个,下文中以每一类训练样本大小n来指代训练集大小。其中,n依次设置为20、30、40、50、60、70。以上的实验框架如果只进行单次实验将会有误差,最终实验采用将以上实验框架循环100次再取平均的办法来获得最终实验结果。
5.2 实验结果与分析
5.2.1 实验一

表1 SRC和不同残差计算方式下的CRC识别率 %
5.2.2 实验二
由于局部适配参数S在不同的分类器和样本集上会有不同的尺度和对应值,实验中将WSRC、WCRC、Manhattan-WCRC的S值统一设为以下的尺度范围值:S=0.001、0.005、0.01、0.05、0.1、0.5、1、5、10。并且基于以上实验设置,给出了 WSRC、WCRC、Manhattan-WCRC不同S值下,训练集大小为n=20、30、40、50、60、70时的识别率。识别精度趋势图分别如图3~5所示。
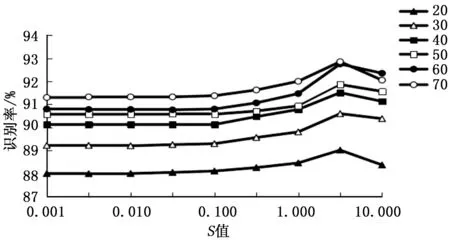
图3 不同S值下WSRC识别率趋势图

图4 不同S值下WCRC识别率趋势图

图5 不同S值下Manhattan-WCRC识别率趋势图
由以上实验可以看出:在训练集大小n为20、30、40、50、60、70时,WSRC的识别率在S=5附近取得较好的效果;在训练集大小n为20、30、40、50、60、70时,WCRC在S=1左右效果较好;在训练集大小n为20、30、40时,Manhattan-WCRC在S=1附近取得较好精度,在训练集大小n为50、60、70时,Manhattan-WCRC在S=0.5附近取得较好精度。
5.2.3 实验三
由实验二可以得到WSRC、WCRC、Manhattan-WCRC不同的S值。在本实验中,WSRC在n为20、30、40、50、60、70时的S值设为5,WCRC在n为20、30、40、50、60、70时的S值设为1,Manhattan-WCRC在n为20、30、40时的S值设为1,在n为50、60、70时的S值设为0.5。
下面给出了SRC、CRC、WSRC、WCRC、Manhattan-WCRC在每一类训练集大小n分别为20、30、40、50、60、70时的识别率(单位为%),如表2所示。
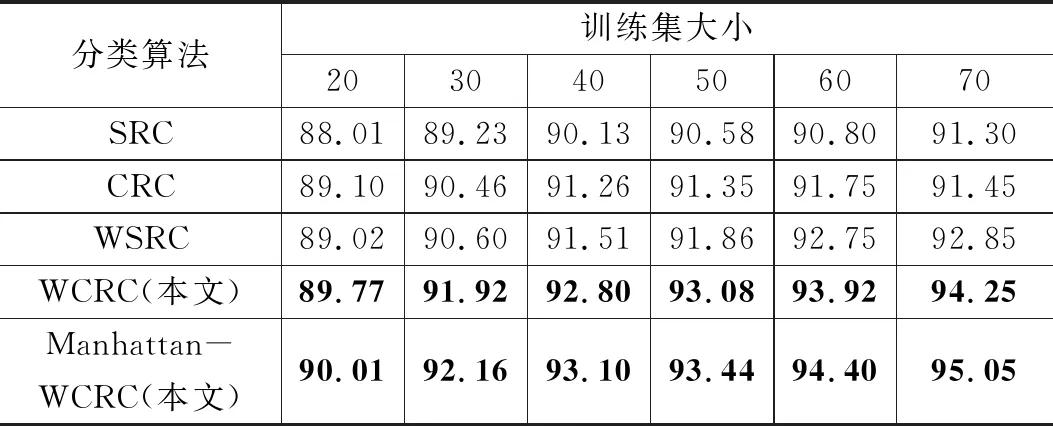
表2 不同分类算法的识别率 %
接下来,给出SRC、CRC、WSRC、WCRC、Manhattan-WCRC在n分别为20、30、40、50、60、70时,平均一个测试信号的识别速度(单位为ms),如表9所示。其中CRC类型算法中的矩阵P是可以根据训练集提前计算的(只需要在识别时输入即可),因此矩阵P的计算在实验中不计入识别所消耗时间。

表3 不同分类算法的识别速度 ms
从以上实验结果可以看出,本文提出的在声频无线传感器网络下基于WCRC的车辆识别方法的识别速度明显快于WSRC、SRC,接近于CRC(比CRC略差,主要是因为WCRC引入加权编码,增加了小部分的计算负担,这一点在WSRC对比于SRC的运算时间损耗也可以看出),从而验证了WCRC对于WSRC、SRC的计算速度优势。同时,本文进一步所提的基于Manhattan-WCRC的车辆识别方法在仿真实验中的识别速度和WCRC非常接近,证明了Manhattan-WCRC在车辆识别中仍然拥有很好的实时性。
6 总结
本文提出的声频传感器网络下基于加权协同表示分类(WCRC)的车辆识别方法相比于传统的CRC方法精度上有了较大幅度的提升,并且在识别速度上没有太大的影响(接近于CRC的识别速度)。与此同时,WCRC相较于WSRC、SRC在运算速度上有着非常明显的加速,以及不错的精度提升。以上结果验证了将局部加权编码引入CRC的可行性和优势。同时,本文进一步提出的声频传感器网络下基于曼哈顿距离加权协同表示分类(Manhattan-WCRC)的车辆识别方法也有很好的表现,对比WCRC,WSRC,CRC,SRC取得了最高的识别精度,同时识别速度和WCRC非常接近(明显快于WSRC、SRC),验证了将曼哈顿距离引入加权编码的可行性和优势。在Matlab仿真模拟实验中,Manhattan-WCRC,WCRC在拥有较好的识别精度下,又拥有非常快的识别速度。这对于在实际的声频传感器网络下进行车辆类型的识别是非常有益的,可以在既保证精度的情况下,又能很好地加强识别的实时性,在推广到实际应用中将会有不错的应用前景。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
新班主任(2022年4期)2022-04-27
房地产导刊(2020年12期)2021-01-14
小学阅读指南·低年级版(2019年11期)2019-07-01
汽车观察(2019年2期)2019-03-15
小天使·一年级语数英综合(2017年11期)2017-12-05
民生周刊(2017年19期)2017-10-25
读者(2016年14期)2016-06-29
环球时报(2009-02-25)2009-02-25