基于PID控温的脉冲管制冷机性能自动测试实验研究
2019-08-27 08:28:34何海韬李金泽唐力飞陈厚磊洪国同
真空与低温 2019年4期
何海韬,李金泽,唐力飞,陈厚磊,曹 阳,洪国同
(1.北京信息科技大学仪器科学与光电工程学院,北京 100192;2.中国科学院理化技术研究所 空间功热转换技术重点实验室,北京 100190;3.中国科学院大学,北京 100190)
0 引言
脉冲管制冷机因其结构简单、振动小、可靠性高、寿命长等优点已在空间和军事领域广泛应用[1],成为我国空间制冷领域的主力机型,在高分等卫星的红外探测系统中,发挥了重要的作用。
中科院理化技术研究所开发的一套制冷机性能智能测试与控制系统可实现数据自动存储、控制直流电源和NF电源、温度自动采集等功能。测量的主要参数包括:用铂电阻温度传感器测量的脉冲管冷头的温度信号、用交流功率计测量的制冷机输入功率等。计算机控制模块包括可编程直流电源和NF电源,前者控制脉冲管冷头的模拟热负载,后者实现对制冷机的输入功率和交流频率的控制,以实现不同输入功率和扫频测试等功能。
装备在卫星上的红外探测器件均需要依靠低温制冷机将其冷却到液氮温区附近,以提高探测器件的灵敏度与探测范围[2]。80K是空间常见的红外探测器的重要工作温区[3]。在实验测试中,常通过加热块模拟红外探测器的热负载,测量在给定温度和制冷机输入功率下的制冷量,或者在给定温度和制冷量下测量制冷机输入功率。但上述系统是开环控制,无法实现对温度的控制。本文设计了闭环系统,引入PID模块控制温度的稳定性,通过调节制冷机输入功率或者制冷量来维持温度稳定。
1 脉冲管制冷机实验装置
脉冲管制冷机主要由压缩机、冷指、调相机构[4]三个主要部件组成,如图1所示。压缩机是交变压力波发生器,推动气体在冷指内部往复运动,实现制冷循环。调相机构采用惯性管加气库的方式,这种方式可以在一定范围内有效地调节系统内压力波与质量流之间的相位,优化蓄冷器内两者的相位分布,达到优化整机性能的目的。制冷机输入功率由NF电源提供。为了测试制冷机的制冷量,在冷指的冷头上贴加热块,直流电源给加热块提供加热量,温度稳定后加热块上的加热量就是制冷机的制冷量,如图2所示。
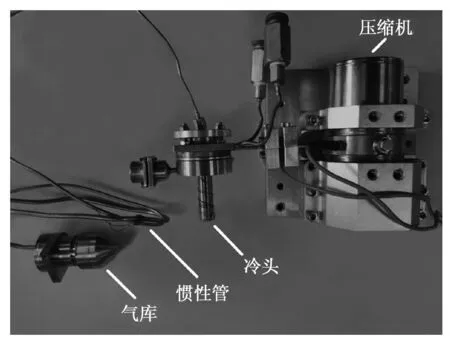
图1 脉冲管制冷机实物图Fig.1 Experimental chart pulse tube refrigerator
2 PID控温程序设计
控温方式种类繁多,如机械式控温、PID控温、模糊控温等[5-6]。PID控温在工程中应用最为广泛,其结构简单、稳定性好、工作可靠、调整方便,在得不到被测参数的精确数学模型时,其不基于模型的特点更加具有优势[7]。PID由比例环节(P-Proportion)、积分环节(I-Integral)、微分环节(D-Differential)三个部分构成,由于具备独立特性,所以PID参数选择具有简便的选择方式和广泛的应用范围[8],PID控制原理如图3所示。
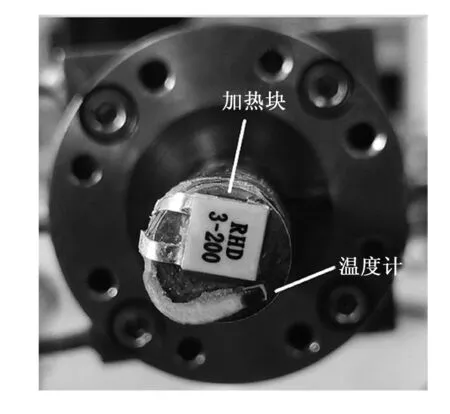
图2 贴有加热块和温度计的冷头实物图Fig.2 Photograph of the cold-end with heating block and thermometer
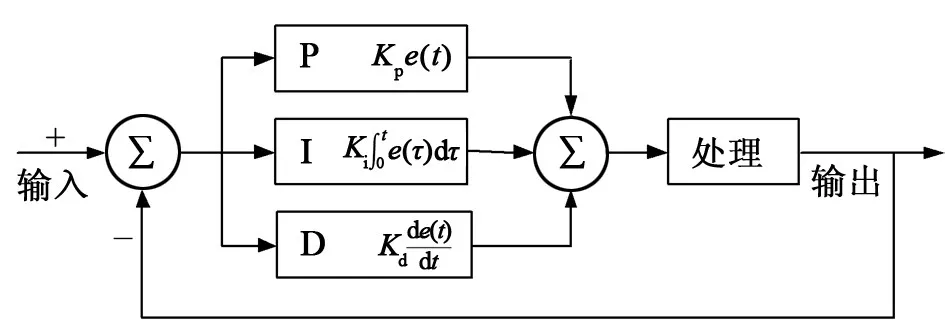
图3 PID控制原理框图Fig.3 Principle block diagram of PID control
整体控温系统设计如图4所示,希望稳定的目标温度作为期望值Ts,实时测量到的温度作为反馈量Tm。经过控温程序处理后,输出不同的功率改变制冷机性能,实现控温。
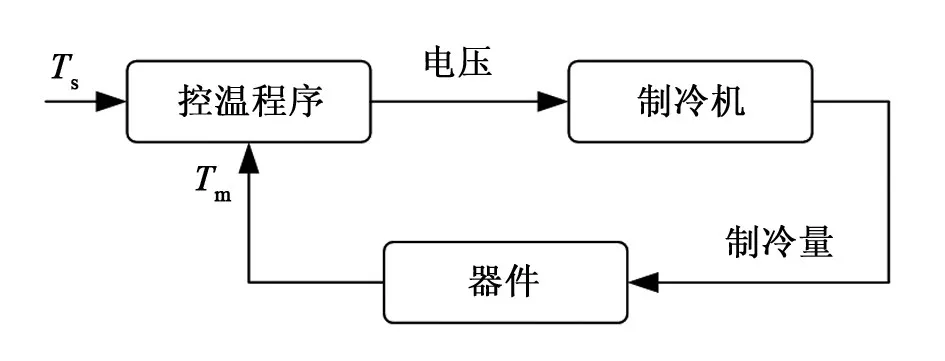
图4 控温程序流程图Fig.4 Temperature control program signal flow graph
控制NF电源部分的系统框图如图5所示,部分程序图如图6所示。在已定温度期望值与加热量的条件下,通过温度传感器KE2700采集实时的温度信息作为系统的反馈量,将温度期望值作为PID模块的设定值,将实时的温度信号作为被测量,输入到PID模块中,根据不同的比例、积分、微分参数输出不同的控制信号,控制NF电源的输出功率,将温度稳定在目标温度,此时的NF电源的输出功率就是在该温度和制冷量下的制冷机输入功率。
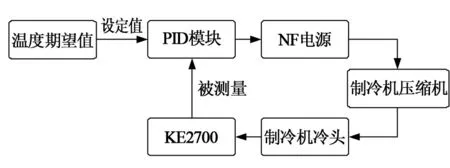
图5 NF电源控制框图Fig.5 NF power control block diagram
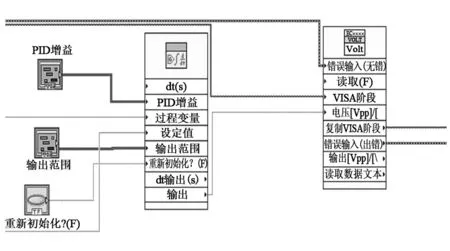
图6 PID控制NF电源部分程序图Fig.6 Program diagram of PID controlled NF power supply
控制直流电源部分的系统框图如图7所示,部分程序图如图8所示,在已定温度期望值与制冷机输入功率条件下,将实时的温度信号做为系统的反馈量输入到PID模块中,与设定值比较,根据不同的比例、积分、微分参数输出不同的控制量控制直流电源,将温度稳定在目标温度。此时的加热量就是该温度下已定制冷机输入功率的制冷量。
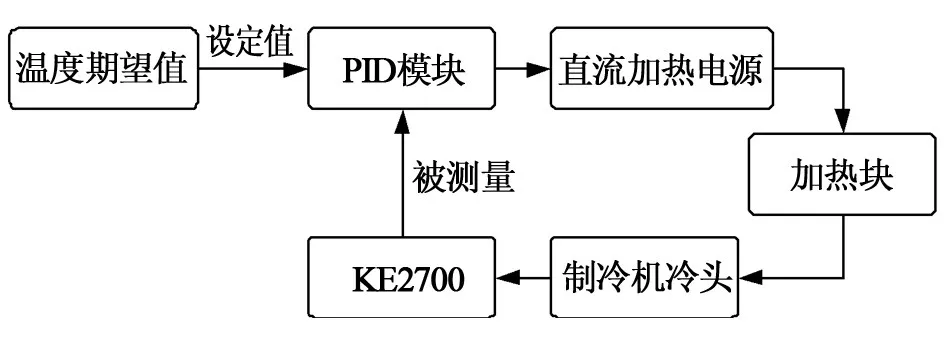
图7 直流电源控制框图Fig.7 DC power control block diagram
通过分别控制制冷机输入功率和制冷量来维持温度稳定。有两种模式可选,一种是通过选项控件选择目标温度和制冷机输入功率测量制冷量,另一种是选择目标温度和制冷量测量制冷机输入功率。在前一种模式下,进入NF控件选板,输入目标加热功率,调节PID的比例增益、积分时间、微分时间三个参数使温度稳定。后一种模式的不同点在于,由于制冷量由加热块的加热量决定,加热量不会随着温度的变化发生偏移。但是温度的变化会引起制冷机中气体的阻尼发生变化,从而导致制冷机输入功率随温度漂移,所以需要不断调整NF电源的输出,保持功率恒定。为此专门设计了制冷机目标输入功率,通过PID模块调节制冷机输入功率稳定。在这种模式下,NF选板里的NF PID增益和NF输出范围均用作调节制冷机输入功率。
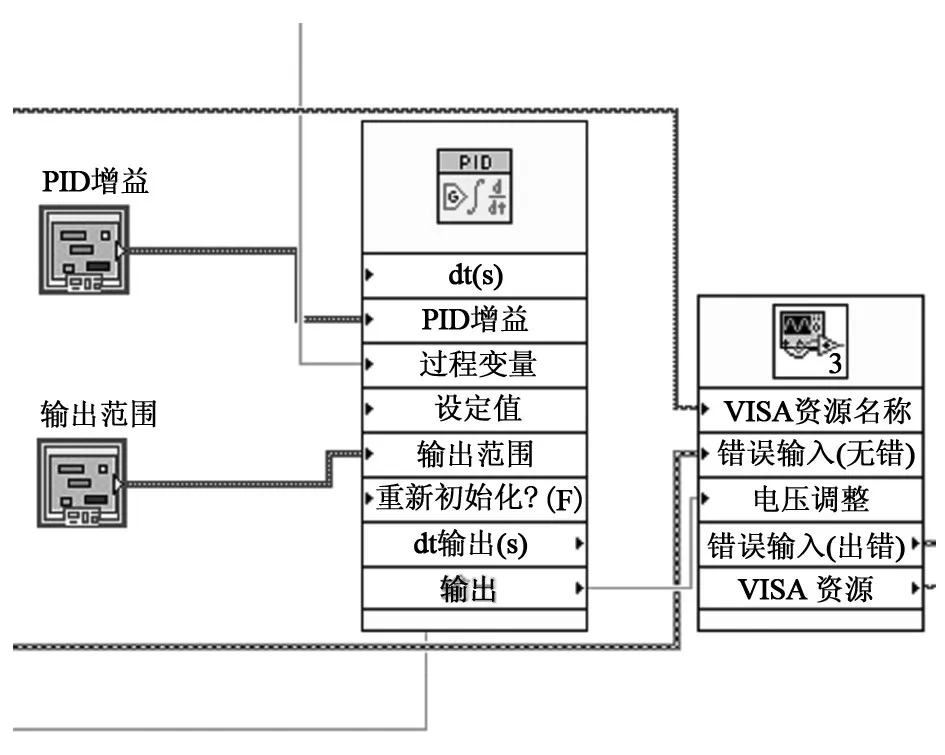
图8 PID控制直流电源部分程序图Fig.8 Program diagram of DC power controlled by PID
3 控温实验结果与讨论
图9为在给定温度与加热量的条件下,将实时温度作为反馈量,通过PID调节NF电源的电压,控制NF电源的输出以维持温度稳定的实验曲线。实验分别测量了80 K和100 K两个温度下,加热功率0 W和0.5 W的条件下,维持温度稳定所需要的NF电源的输出功率,即该条件下的制冷机输入功率。在此期间PID的参数保持不变,其中P=-1,I=0.1,D=0.1。测得80 K和100 K下加热功率0 W时的制冷机输入功率分别为17.7 W和7.1 W,加热功率0.5 W时,制冷机输入功率分别为56.1 W和21.9 W。
实验最后只改变PID模块中的比例系数,将P减小为-0.7,测得温度为80 K,加热功率0 W的条件下制冷机输入功率为17.2 W,与P=-1的条件下测得的制冷机输入功率17.7 W基本相同。从图10可以看出,不同的P、I、D参数,温度曲线的振荡幅度和温度稳定时间均不同。
实验过程中,制冷机输入功率不能太大,会导致压缩机出现撞缸等异常情况,损坏压缩机。加热块的加热功率也不能太大,容易发生温度过高被烧坏的危险。为保证实验设备的安全,必须在PID模块中设置合适的输出范围,限制NF电源或直流电源的输出电压,从而限制二者的输出功率。如果PID模块的输出范围设置过小,就会导致即使NF电源或直流电源的输出已经最大,仍然不能达到目标温度的情况发生,如图9中1和图14中2两点所示。

图9 初始PID控制NF电源控温实验曲线Fig.10 Temperature curve for NF power controlled by initial PID
实验中,P、I、D三个参数不同,温度稳定的时间和温度曲线的波动程度均有所不同,甚至有些不合理的参数设定会导致温度曲线在目标温度附近来回振荡,温度无法稳定。针对控制制冷机输入功率维持温度稳定的方式,分别讨论P、I、D三个参数对实验的影响,每组实验均与P=-1、I=0.3、D=0.1的实验曲线对比。图10为只改变比例系数P的实验曲线,当P=-1、P=-0.3时,温度在一定时间后均能稳定,P=-1时曲线的波动更明显。当P=-2时,温度无法稳定,曲线在目标温度附近波动,说明在该温度下这组参数不适合。

图10 不同比例系数P的温度曲线Fig.10 Temperature curve with different the P values
当P=-0.3时,相对于P=-1比例系数小(负号表示调节方向),每次的调节量小,当出现过调时回调的速度慢,所以曲线的波动程度更大。单纯的比例作用就是把设定值与目标温度的差值乘以一个系数作为输出。当P=-2时,比例系数过大,程序每执行一次都发现上次的调节量过大,只能不断回调。由于比例系数过大,每次调节都过大,导致曲线不断振荡,温度无法稳定。
图11为改变积分系数I的实验曲线,当I=0.1、I=0.8时,温度均能在一定时间后稳定,当I太小等于0.05时,温度不能稳定,曲线在目标温度附近振荡,说明在该温度下这组参数不适合。单纯的积分作用就是当设定值与目标温度的偏差不为0时,让输出按照一定速度一直朝一个方向累加。当I=0.05时,积分系数太小,积分消除偏差的能力不足,PID主要由另外两个参数起作用,积分调节不会导致曲线振荡。增大积分系数在I=0.3时,积分作用明显加强,超调后能消除偏差。继续增大积分系数,当I=0.8时,积分作用更强,曲线不出现超调的现象。
图12为只改变微分系数D的实验曲线,D=0.1,D=0.03时温度均能在一段时间后稳定,但当D=0.5时温度无法稳定,曲线在目标温度附近振荡,说明在该温度下这组参数不适合。微分作用能超前调节,只考虑微分系数时,设定值与目标温度的差出现扰动,输出才会出现大的变化。D=0.5时微分系数过大,当出现扰动后调节太大,导致曲线来回振荡。减小微分系数D=0.1后,微分调节减弱,曲线出现一次波动后趋于稳定。继续减小微分系数,当D=0.03后曲线不发生波动,降温至目标温度后直接趋于稳定。
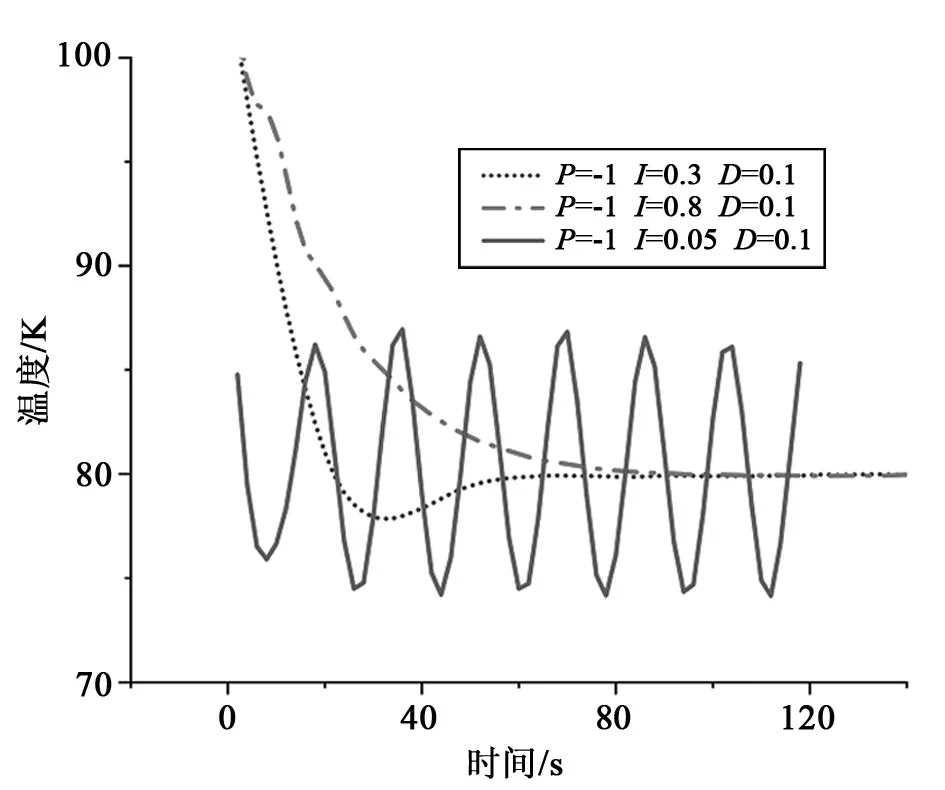
图11 不同积分系数I的温度曲线Fig.11 Temperature curves with different the I values
实验结果表明,在这台制冷机实验中,通过调节制冷机输入功率使温度稳定在80 K,比例系数P应在-0.5~-1.5的区间内,过大会产生振荡不收敛,过小稳定时间会过长;积分系数I应在0.1~1.0的区间内,过小会产生振荡不收敛;微分系数D应在0.01~0.1的区间内,过大会产生振荡不收敛。
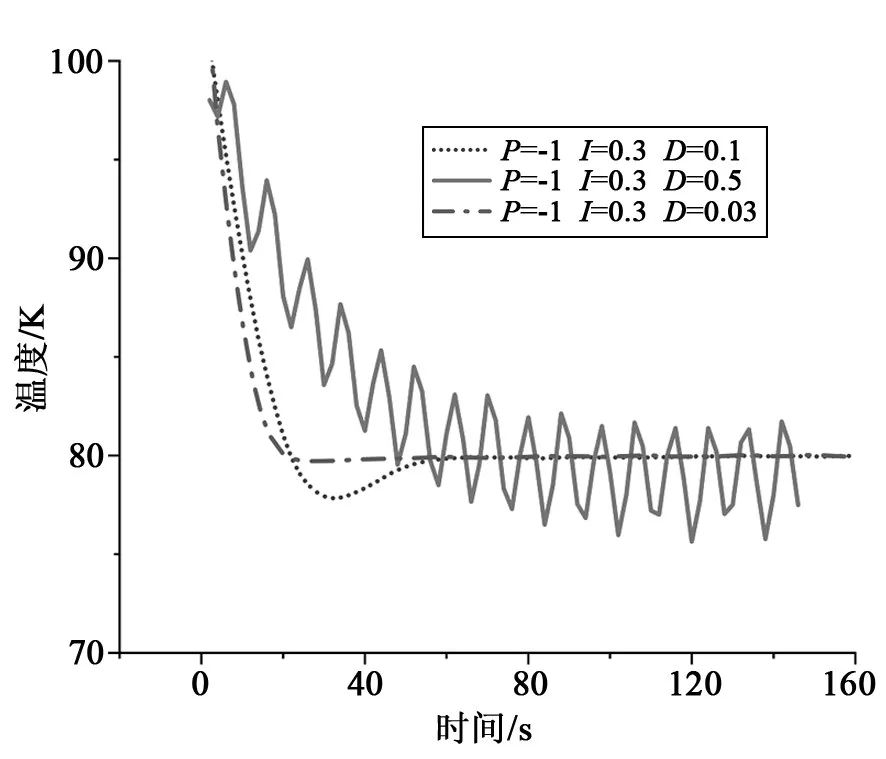
图12 不同微分系数D的温度曲线Fig.12 Temperature curves with different the D values
按照上述方法测试不同P、I、D组合下的温度曲线,综合比较后选择针对该型号的制冷机,温度在80 K和100 K,加热功率在0 W和0.5 W的条件下都合适的一组PID参数为:P=-1,I=0.3,D=0.1,该参数下实验过程的温度曲线如图14所示。相比于P=-1、I=0.1、D=0.1,这组温度曲线振荡幅度和超调量均明显减小,振荡次数明显减少,曲线基本在波动一次后趋于稳定,温度稳定时间平均缩短3 min左右,控温精度在±0.02 K。
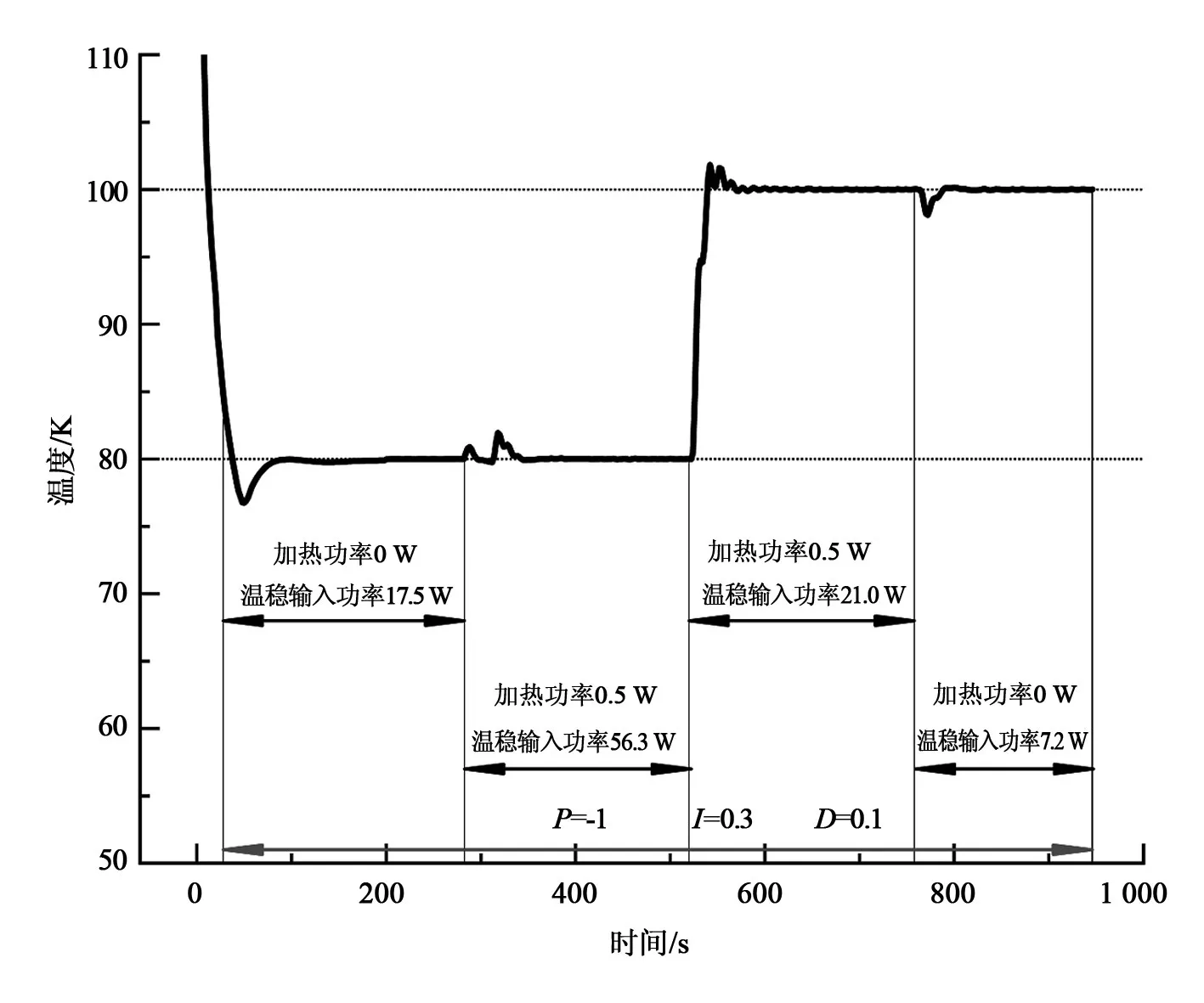
图13 优化后的PID控制NF电源的控温实验曲线Fig.13 Temperature curve for NF power controlled by optimized PID
图14为在给定温度和制冷机输入功率下测得的制冷量。同样,将实时温度作为反馈量,通过PID模块控制直流电源的电压,进而控制加热块的加热量,以维持冷头温度稳定,从而测得制冷量。按照上述方法测试不同P、I、D组合下的温度曲线,得到一组针对该型号的制冷机,温度在80 K和100 K,制冷机输入功率在45 W和60 W的条件下都较合适的参数为:P=0.3,I=0.4,D=0.1。实验完成了对输入功率45 W,温度稳定在80 K和100 K条件下加热功率的测量,加热功率分别为1.02 W和1.99 W。输入功率为60 W时,温度稳定在80 K和100 K条件下的加热功率分别为1.41 W和2.6 W。
实验过程温度曲线除了在80 K温度、45 W输入功率时出现稍大超调外,其余三种情况均未出现大的超调。曲线在一次波动后便趋于稳定,振荡幅度小,振荡次数少,温度稳定的精度在±0.02 K。

图14 PID控制直流电源的控温实验曲线Fig.14 Temperature curve for DC power controlled by PID
4 总结
本文应用PID控制原理在实验室已有的智能测试与控制系统基础上开发了脉冲管制冷机输入功率与制冷量的自动测量新方法,分别实现在规定温度和输入功率条件下调节制冷量和在规定温度和制冷量下调节输入功率,以控制温度稳定,从而得到稳定后的制冷量或压缩机输入功率的目的。冷头温度波动±0.02 K,稳定性远高于要求的±0.3 K,与手动调节控制相比,控温精度更高,控温时间更短,测量精度更高。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07 06:21:30
汽车维修与保养(2021年8期)2021-02-16 00:28:20
粮食与饲料工业(2017年2期)2017-03-08 07:48:05
环境技术(2016年4期)2016-09-22 03:50:20
新世纪水泥导报(2016年1期)2016-07-01 04:00:00
工业设计(2016年4期)2016-05-04 04:00:15
真空与低温(2015年4期)2015-06-18 10:47:26
真空与低温(2015年4期)2015-06-18 10:47:22
低温与特气(2014年1期)2014-03-29 01:02:46
中国设备工程(2014年1期)2014-02-28 13:43:30